Загальна характеристика курсової роботи - Математичне моделювання
Курсова робота складається з трьох зв'язаних між собою частин. У першій частині завдання необхідно розрахувати масогабаритні характеристики і побудувати зовнішній вигляд авіаційного пускового блока, що має мінімальну вагу та задовольняє заданим обмеженням. Визначення мінімальної ваги блока виконується шляхом перебору можливих варіантів побудови його конструкції. При виконанні курсової роботи необхідно володіти елементарними навичками роботи в AutoCAD чи Open Draw чи 3D-max. Зокрема, при побудові зовнішнього вигляду АПБ у першій частині завдання зручно скористатися графічними примітивами. Графічними примітивами є мінімальні графічні об'єкти, що складають векторний рисунок. До графічних примітивів відносяться лінії і стрілки, прямокутники, кола, еліпси, дуги, сегменти і сектори, а також тривимірні об'єкти (куб, куля, циліндр і т. ін.).
При побудові обтічника АПБ зручно скористатися кривими П. Безьє чи апроксимуючим степеневим поліномом.
У другій частині - потрібно розрахувати за відомими формулами рух центра мас (ЦМ) і рух навколо ЦМ АПБ при його аварійному скиданні. При скиданні АПБ застосовують, в основному, примусове відокремлювання [12]. Суть примусового відокремлювання полягає в тому, що АПБ відстрілюється від носія в обох точках його підвіски за допомогою двох піропатронів. При цьому піропатрон, розташований у передній точці підвіски (у носовій частині АПБ) має більший заряд, чим піропатрон, розміщений у задній точці підвіски. У такий спосіб створюється не тільки імпульс сили, що відокремлює АПБ від носія, але й обертаючий момент, що розвертає його від носія з кутовою швидкістю. Припустимо, що в момент відокремлювання АПБ, носій виконує горизонтальний політ і початкова ділянка траєкторії блока буде лежати у вертикальній площині (рис. 2).
Рух АПБ, у першому наближенні, можна зобразити у вигляді двох складових, кожна з яких розраховується ізольовано від іншої: рух ЦМ блока і рух навколо його ЦМ.
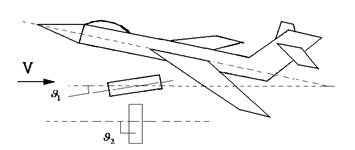
Рис. 2
На АПБ після його відокремлення від носія діють дві сили:
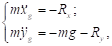
Аеродинамічна і сила ваги. Якщо не враховувати аеродинамічної сили, то траєкторія руху ЦМ блока в нерухомій земній системі координат (НЗСК) описується системою рівнянь:

(1)
Де g = 9,81 м/с2 - прискорення вільного падіння.
У цій системі координат горизонтальна вісь OX прямує в напрямку руху, а вертикальну вісь - OYG прямує вгору.
Швидкість і координати ЦМ блока можуть бути визначені шляхом інтегрування системи рівнянь (1). З урахуванням аеродинамічної сили система рівнянь ускладнюється і приймає вигляд:
(2)
Де RX,RY - проекції вектора аеродинамічної сили на осі НЗСК OXG і OYG відповідно, m - маса АПБ.
Рішення системи рівнянь (2) залежить від аеродинамічних характеристик АПБ, а не тільки від початкових умов польоту, як рішення системи рівнянь (1).
У курсовій роботі необхідно оцінити вплив аеродинамічних характеристик блока на траєкторію руху її ЦМ [12-14]. У відповідності до методики, що наведена у роботи [15], при постійній швидкості руху блока після його скидання з носія і при лінеаризації основних аеродинамічних коефіцієнтів, залежність кута тангажа АПБ від часу можна записати у вигляді:

(3)
Де C1, C2, C0 - постійні коефіцієнти,

, , , ,

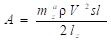
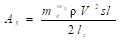

У нашому випадку може бути прийнята умова, що C1, = 0, тоді з вищенаведеного залишиться лише

При цьому залежність кута тангажа АПБ від часу (3) спрощується:

(4)
Після диференціювання рівняння (4) за часом, одержимо:
(5)
Початкова кутова швидкість щZ, що задається різними імпульсами сил від піропатронів, буде визначати значення постійного коефіцієнта C2 в рівнянні (5). Коефіцієнт C2, також залежить від режиму польоту носія. Його значення визначається студентами при виконанні курсової роботи. Аеродинамічні характеристики задаються графіками.
CY=CY(б), CX=CX(б), mZ=mZ(б)
У третій частини курсової роботи необхідно оцінити можливість експериментальної перевірки траєкторії руху АПБ при його аварійному скиданні за допомогою відеокамери (ВК).
Завдання полягає в одержанні максимально достовірної інформації про кутові переміщення ЛА на траєкторії його руху за допомогою ВК без далекоміра з постійною частотою н кадрів у заданому часі відновлення CDD матриці tЗ з нерухомої точки спостереження. Фокусна відстань об'єктива fг під час зйомки може змінюватися.
Під час розв'язання задачі виникають дві основні проблеми, а саме:
- 1) як застосувати ВК, тобто де установити її, які в неї мають бути характеристики (швидкодія, фокусна відстань fг і т. ін.), куди направити її оптичну вісь у тривимірному просторі; 2) які потрібні допоміжні засоби для вимірювання лінійних і кутових переміщень ЛА на траєкторії.
Для дослідження руху ЛА навколо ЦМ доцільно ВК розташувати збоку від опорної траєкторії на заданій відстані r від неї і на відстані R від точки скидання, як це показано на рис. 3.
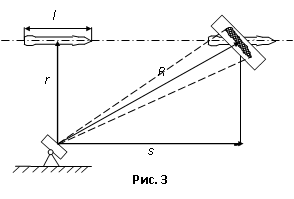
Далі треба повертати ВК із заданою кутовою швидкістю щВК для фіксації всієї траєкторії ЛА, причому величина щВК пов'язана з відстанями r, R і величиною швидкості V0х. При нерухомій ВК при її встановленні збоку від траєкторії, можлива фіксація тільки частини траєкторії ЛА.
Необхідну величину щВК можна оцінити таким чином. За інтервал часу Дt ЛА пройде відстань порядку S ? V0xДt, але за цей же час вісь об'єктива ВК повинна буде повернутися на кут
.
Таким чином, величину кутової швидкості обертання ВК можна оцінити за формулою:
, (6)
Причому величина буде досягати максимуму, якщо R = r.
Похожие статьи
-
Характеристика проектованої підсистеми літального апарата - Математичне моделювання
Відомо, що проектування технічного об'єкта пов'язано зі створенням, перетворюванням і представленням у прийнятній формі образу цього об'єкта. Образ...
-
Графіки перехідних процесів, отримані шляхом моделювання: Момент двигуна, Нм Кутова швидкість ротора, рад/с Модуль потокозчеплення статора, Вб Модуль...
-
Біологія . Необхідно знайти залежність площі молодого листка, що має форму круга, від часу. Відомо, що швидкість зміни площі в момент пропорцією площі...
-
Бізнес процес моделювання Короткий опис підприємства Відкрите акціонерне товариство ВАТ Житомирська фабрика нетканих матеріалів "Тетерів", розташоване за...
-
Вступ - Математичне моделювання
Математичний модель проекція матриця Курсова робота з дисципліни "Графічне і геометричне моделювання та інтерактивні системи" присвячена математичному...
-
Загальна характеристика прийнятого методу оцінки проектних рішень і його основних показників Головною метою розрахунку показників економічної...
-
В даній роботі ми досліджували асинхронний двигун 4А112МА8У3. З механічних характеристик було помічено, що при швидкостях та, критичний момент АД...
-
Гідроксильні похідні ароматичних вуглеводнів, у яких гідроксильна група безпосередньо зв'язана з бензольним ядром. Сполуки, що містять гідроксил в...
-
ВИСНОВКИ, ЛІТЕРАТУРА - Математичне моделювання та оптимізація об'єктів хімічної технології
Завданням курсової роботи було здійснення математичного моделювання та програмування розрахунку матеріального та теплового балансу процесу полімерізації...
-
Комплекс фізико-механічних, хімічних і діелектричних властивостей поліетилену дозволяє широко застосовувати цей матеріал в багатьох галузях промисловості...
-
Фенол (гідроксибензен, карболова кислота - лат. Carbo, carbonis - вугілля та лат. Oleum - олія) С6Н5ОН. Безбарвна кристалічна речовина зі специфічним...
-
Попит і пропозиція - економічній категорії товарного виробництва. Попит - представлена на ринку потреба в товарах, Пропозиція - продукт, який є на ринку...
-
Реакції, в які вступають спирти, супроводжуються розривом зв'язків О-Н або С-О. 1. Кислотні властивості спиртів. Утворення алкоголятів. Спирти не...
-
1. Гідроліз галогенопохідних. При обробці галагенопохідних водним розчином лугу, іде заміщення галогену на гідроксил. СН3СН2Br + NaOH > СН3СН2OH +...
-
Сировина для виробництва поліетилену Поліетилен виробляється з етилену, який, у свою чергу може бути отриманий різними методами, зокрема термічним...
-
ВСТУП - Математичне моделювання та оптимізація об'єктів хімічної технології
Математичне моделювання хіміко-технологічних процесів використовується для вибору оптимальних режимів їх роботи, побудови автоматичних систем керування...
-
Висновок - Загальна характеристика, номенклатура та ізомерія оксигеновмісних органічних сполук
До оксигеновмісних органічних сполук належать такі класи сполук, як спирти, феноли, альдегіди і кетони. Я ознайомилась із загальною будовою молекул...
-
Мурашиний альдегід (формальдегід, метаналь) СН2О - безбарвний газ з різким запахом, розчинний у воді. Перший представник ряду альдегідів, з яким...
-
ЗАГАЛЬНА ХАРАКТЕРИСТИКА ОКСИГЕНУ І СУЛЬФУРУ - Неметали та їхні сполуки
Історичні відомості. Про історію відкриття кисню, молекули якого складаються з елемента Оксигену, ви довідалися ще у 8 класі. Тепер ознайомтеся з деякими...
-
1. Окиснення спиртів. Первинні спирти окиснюються до альдегідів, а вторинні - до кетонів. 3. Гідратація алкінів (реакція Кучерова) . З ацетилену в умовах...
-
Альдегіди і кетони - похідні вуглеводнів, що містять в своєму складі карбонільну групу (>С=О). Тому їх ще називають карбонільними сполуками. Назву...
-
Поняття математичного моделювання - Математичне моделювання та диференціальні рівняння
Поняття математичного моделювання трактується різними авторами по своєму. Ми будемо його пов'язувати з нашою спеціалізацією - прикладна математика. Під...
-
Феноли - безбарвні кристалічні речовини або рідини з характерним запахом. Як правило, вони погано розчинні у воді; при зберіганні на повітрі окиснюються...
-
Загальна характеристика ТОВ "Цегельний завод ім. М. Г Миндру" Загальні положення Товариство з обмеженою відповідальністю "Цегельний завод ім. М. Г...
-
Математична модель асинхронного двигуна (1.1)-(1.4) отримана для Т-подібної схеми заміщення, що показана на рис.1, в той час як приведені в завданні...
-
СПГ зберігається в спеціальних кріоцістернах, влаштованих за принципом посудини Дюара. Транспортується СПГ на спеціалізованих морських суднах - танкерах,...
-
Загальна характеристика інформаційного забезпечення Інформаційне забезпечення будь-якої системи являє собою методи класифікації та кодування інформації,...
-
ОПИС ТЕХНОЛОГІЧНОЇ СХЕМИ - Математичне моделювання та оптимізація об'єктів хімічної технології
Процес отримання ПЕНД включає наступні операції: приготування каталітичного комплексу, форполімеризація, вигрузка суспензії і сушка форполімеру,...
-
І аналітична група А)Загальна характеристика групи До І аналітичної групи катіонів належать іони лужних металів, тобто елементи І групи (головної...
-
Класифікація аніонів. Поділ аніонів на групи грунтується на різній розчинності солей барію і срібла. І група - аніони, солі барію яких погано...
-
Хімізм і механізм реакцій - Математичне моделювання та оптимізація об'єктів хімічної технології
Поліетилен в промисловості виробляють трьома способами: при високому тиску (поліетилен низької щільності), при середньому тиску і при низькому тиску...
-
ЗАГАЛЬНА ХАРАКТЕРИСТИКА ОКСИГЕНУ І СУЛЬФУРУ - Загальні відомості про елементи
Історичні відомості. Про історію відкриття кисню, молекули якого складаються з елемента Оксигену, ви довідалися ще у 8 класі. Тепер ознайомтеся з деякими...
-
Щоб значно спростити задачу транспортування і подальшого зберігання газу, його необхідно зріджувати. Додаткова умова - це охолодження природного газу,...
-
Спирти, молекули яких містять декілька гідроксильних груп відносять до Багатоатомних спиртів . Спирти, які містять дві гідроксильні групи біля одного...
-
Горіння простих і складних речовин: А) С + О2 СО2 2Сu + O2 = 2CuO (окислення, крім благородних металів) Б) СН4 + 2О2 СО2 + 2Н2О 2. Розклад під час...
-
Оксиди, їх класифікація. Номенклатура - Оксиди, загальна характеристика
Оксидами називаються складні речовини, до яких входять два елементи, один з яких оксиген. Майже всі хімічні елементи утворюють оксиди. І досі ще не...
-
Вступ - Загальна характеристика, номенклатура та ізомерія оксигеновмісних органічних сполук
Всі органічні речовини передусім складаються з атомів карбону і гідрогену. Але, поряд з тим, відомо багато речевин містить також атоми оксигену. Із...
-
Закони Кеплера руху планет - Математичне моделювання та диференціальні рівняння
Згідно закону всесвітнього тяжіння два тіла, які знаходяться на віддалі друг від друга і які мають маси і притягаються з силою (1.8) Де - константа...
-
Загальна формула одноатомних спиртів R-OH. Залежно від того, з яким атомом Карбону (первинним, вторинним чи третинним) зв'язана гідроксильна група,...
-
(1.1) , (1.2) , (1.3) . (1.4) Запишемо математичну модель короткозамкненого асинхронного двигуна в системі координат статора (a-b), записану через...
Загальна характеристика курсової роботи - Математичне моделювання