Теоретичні і технічні відомості, Приклад виконання курсової роботи - Математичне моделювання
Для розрахунку аеродинамічних сил і моменту МZ використовуємо формули [14]:
; ; ,
Де CX - коефіцієнт сили опору повітря, CY - коефіцієнт піднімальної сили, , - похідні коефіцієнта моменту тангажа по куту атаки і по кутовій швидкості тангажа, відповідно, q - швидкісний напір.
Рівняння руху АПБ навколо поперечної вісі ОZСв Має вигляд:
(7)
Де JZ, щZ - момент інерції і кутове прискорення блока,
MZ - момент сил відносно осі ОZСв.
Як випливає з рівняння (7) кутове прискорення dщZ/dt=MZ/JZ, тобто

. (8)
Інтегруючи обидві частини рівняння (8) від ф = 0 до ф = t, якщо MZ/JZ=const (без урахування моменту аеродинамічних сил на початковій ділянці руху АПБ), одержимо
(9)
Залежності CY(б) і CX(б) можна зобразити у вигляді однієї кривої, яка називається полярою літака і має вигляд:
(10)
Де - коефіцієнт сили лобового опору при нульовій піднімальній силі, а коефіцієнт A - стала величина для даного АПБ.
Приклад виконання курсової роботи
ЧАСТИНА 1. Розрахувати мінімальну вагу АПБ при таких вихідних даних:
N=19, LБ = 200 см, д = 0,1 см, RВн = 8 см - внутрішній радіус труби.
Необхідно дати порівняльний аналіз для двох-трьох варіантів розташування пускових труб.
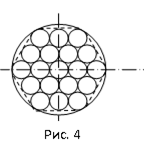
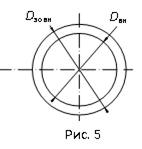
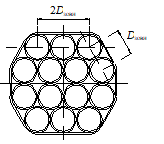
А) Спочатку виберемо обтічник АПБ у вигляді кола. Поперечний переріз АПБ буде мати вигляд, що показаний на рис. 4. При цьому DВн=2RВн - внутрішній діаметр пускової труби (рис. 5), а DЗовн=DВн+2д - зовнішній діаметр труби: DВн=16 см, DЗовн=16,2 см. Площа поперечного перерізу однієї труби дорівнює
СМ2.
Площа поперечного перерізу обтічника обчислюється аналогічно SБc ? 64,37 см2. Об'єм однієї труби см3, а об'єм 19-ти труб буде складати V19=19228 cм3. Внутрішній радіус блока RБл=40,5 см, а з урахуванням товщини обтічника RБл0=41,5 см.
При цьому об'єм одного обтічника АПБ VБл=12874 см3, а об'єм АПБ з урахуванням усіх труб VC=VБл+V19 = 32102 см3.
Маса АПБ m=V=250395,6 г ? 250,4 кг, вага блока складає
G=mg ? 2456,42 Н.
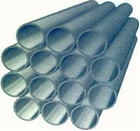
Зовнішній вигляд АПБ збоку показано на рис. 6.
Рис. 6
Площа поперечного перерізу АПБ дорівнює
SМ =(5DЗовн+2д)2 ? 0,52 м2.
Б) Обтічник АПБ також може бути виконаний у вигляді багатокутника, як приклад, у вигляді восьмикутника (14 труб). На рис. 7а показано поперечний переріз АПБ, а на рис. 7б - перспективне зображення зв'язування труб.
А) б)
Рис. 7
Для дев'ятнадцяти труб обтічник може бути представлений у вигляді шестикутника зі зрізаними кутами, як зображено пунктиром на рис. 4. Внутрішній периметр перетину обведення шестикутника зобразимо у вигляді двох складових
PБ=12DЗовн+6(рDЗовн /12)=DЗовн(12+р/2) ? 2,20 м,
Що значно менше, ніж периметр PА=5рDЗовн ? 2,54 м у варіанті (а). При цьому об'єм і маса обтічника зменшаться на 13,4%, а величина SМ - на 17,4%.
Таким чином, варіант (б) краще, ніж варіант (а), при цьому у варіанті (б): SМ ? 0,43 м2, m ? 236,94 кг.
ЧАСТИНА 2. Розрахувати рух АПБ після його відокремлення від літака-носія, який рухається зі швидкістю V=200 м/с. Необхідно розглянути рух у цілому, тобто з урахуванням руху центра мас. У першому наближенні його рух можна оцінити як вільний рух падаючого тіла. Припустимо, що імпульс сил від піропатронів розганяє АПБ по вісі Y протягом t=0,01с до швидкості, що дорівнює 10 м/с. Якщо по вісі X не діє жодна сила, то швидкість руху по цій осі - постійна. По осі Y діє сила ваги p=mg і по цій осі рух рівноприскорений, тобто:
VУ = - 9,9 - gt, SY = - 9,9t - (gt2)/2, SX =Vt.
Підставимо числові дані в рівняння (1) і отримаємо траєкторію руху АПБ (рис. 8).
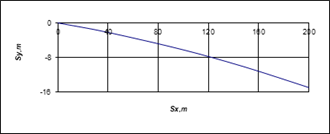
Рис. 8
При цьому Vх=V=200 м/с, Vу(0,01) = - 10 м/с, Sу(1)14,9 м, Sх(1)200 м.
Перейдемо до розрахунку обертального руху АПК навколо центра мас. Припустимо, що піропатрони створили початковий момент сил МZ=1000 Нм, що діє на АПБ якийсь час Дt=0,01c. Момент інерції блока дорівнює J Z ? 78,98 кгм2.
Відповідно до рівняння (9) початкова кутова швидкість АПБ (0,01) ? 0,13 рад/с ? 7,45 град/с.
Обчислимо коефіцієнти A, А1, A2, A3. З цією метою з графіків визначимо:
;
Коефіцієнти А, A1, A2,A3 мають розмірність:

;
;;
.
Обчислимо числові значення цих коефіцієнтів:

2,03

;


Знайдемо значення

Або

Із умови (9) та виразу (5) отримуємо:

,
Тобто C2х= 0,17 рад. З формули (4), приймаючи, що =0, отримуємо C0= 0,17 рад.
Таким чином закон зміни кута тангажа від часу має вигляд:
(11)

Вважаючи, що протягом однієї секунди кут ? 0 знайдемо із формули (11) діапазон зміни кута атаки б, тобто звідси, рад.
Отже б(1) =0,008 рад і б лежить в межах (0;0,08) рад, або (0;4,58) град. Кут б, який зростає від 0 до 4,58 град, змінює CY від 0 до 0,16, що згідно з формулою (10), визначає зміну CX.від 0,11 до 0,13.
Далі визначимо вплив аеродинамічних сил RX і RY на траєкторію руху ЦМ АПБ. Визначимо середні значення аеродинамічних сил, що діють на АПБ протягом однієї секунди, як напівсуму мінімальних (RX=RY=0) та максимальних значень RX RY, отримаємо RXcp=1264,2 н, RYcp=842,8 н. При цьому швидкість АПБ за Дt=1с зменшиться на 5,34%, а зміщення по осі ОУG збільшиться на 36%. На рис. 9 поведено траєкторії руху ЦМ АПБ: крива 1 - без урахування аеродинамічних сил, крива 2 - з урахуванням аеродинамічних сил згідно з рівнянням (2).
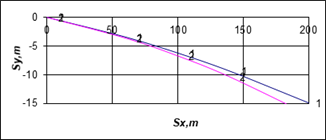
Рис. 9
ЧАСТИНА 3. Знайти відстань r0 для фіксації на камеру процесу відокремлення АПБ від літака при таких вихідних даних:
Частота відновлення матриці камери - 100 Гц (Дt=0,01с);
Кількість пікселей у матриці камери NП=3*106 пкс;
Площа матриці камери - SК=1 см2;
Фокусна відстань - f=4 см;
Величина мінімального відхилення від траєкторії руху блока, що гарантує безпеку відеозйомки rМ=100 м.
Нерухому ВК доцільно встановити в середині відрізка шляху, що буде пройдений АПБ за одну секунду, тобто на відстані 100 м від точки його скидання.
Максимальне віддалення rД визначається за умовою забезпечення розміру проекції АПБ на CDD матриці, наприклад, у 100 пікселей. Розрахунок відстані rР Доцільно проводити за таким алгоритмом:
Визначається середнє значення rСер1 між величинами rМ і rД та перевіряється чіткість фіксації процесу руху АПБ;
Якщо немає чіткості фіксації, то визначається середнє значення rСер2 між величинами rМ і rСер1 і т. д.
Розрахуємо розмір пікселя для даної камери. При заданій кількості пікселей у матриці можливо записати 2000 пкс *1500 пкс (рис. 10).
Виходячи з обраної роздільної здатності камери, можемо знайти розмір пікселя, при цьому припустимо, що його ширина дорівнює його довжині. Нехай розмір пікселя х см. Тоді площа матриці камери буде дорівнювати (2000пкс.1500пкс) , що за умовою дорівнює 1см2. Таким чином 2000.Х.1500.Х = 1 см2; або 3.106.Х2 = 1 см2, тобто х2=0,33.10-6 см2; х ? 0,58.10-3 См - розмір пікселя в CDD матриці. Рухомий об'єкт, що знімається камерою, буде мати чітке зображення, якщо його зображення у матриці не зміщується. Наприклад, зміщення буде не більше, ніж на 10-2 пкс за 0,01 с, тобто на 0,58.10-5 См.
Із відомої формули [10] розрахуємо rД, при якому розмір зображення предмета (проекції предмета) у камері буде не менше, ніж 100 пкс
RД = (Y.F) /,
Де - розмір зображення предмета, f - фокусна відстань об'єктива, Y - розмір об'єкта, rД - відстань від об'єкта до об'єктива.
Після обчислення отримаємо
Отже, rСр1=118,95 м. Максимальна відстань до об'єкта дорівнює гіпотенузі прямокутного трикутника R=155,4 м.
Максимальна кутова швидкість переміщення об'єкта відносно ВК розраховується за формулою (6)
ЩВк ? 1,68 рад/с = 96,34 град.
Зробимо розрахунок розміру зображення АПБ на матриці камери у момент його проходження найближчої точки. При цьому максимальна довжина проекції =6,73.10-4 М, що складає не менше 115 пікселей на CDD матриці.
У момент скидання блока довжина його проекції на картинну площину при ? 0 та (див. рис. 3) дорівнює
Y =LБCos(д),
Де кут д може бути розраховано за формулою
Д=.
Після розрахунків додамо д0,7 рад40,05 град, величина 1,53 м, а =3,94.10-4 М, що складає не менше 71 пікселя.
Далі знайдемо зміщення зображення АПБ при його розвороті навколо ЦМ. За інтервал часу, що дорівнює 0,01с, блок розвернеться на кут, що дорівнює рад = 0,072 град, тобто його кінець зміститься на відстань, що дорівнює
М.
На матриці відеокамери зміщення кінця зображення АПБ складе 4,37.10-6 М, що значно менше, ніж розмір одного пкс приблизно у 100 разів.
На основі проведених обчислень можна зробити висновок про те, що на відстані rР=118,95 м від траєкторії руху літака і відстані R=155,4 м від точки його скидання (без врахування висоти польоту літака) виходить чітке зображення траєкторії руху АПБ у відеокамері.
Похожие статьи
-
Загальна характеристика курсової роботи - Математичне моделювання
Курсова робота складається з трьох зв'язаних між собою частин. У першій частині завдання необхідно розрахувати масогабаритні характеристики і побудувати...
-
Нехай ми маємо вибірку значень випадкової величини Х= x1, x2, .... xN, з кількістю спостережень - N. Розіб'ємо весь діапазон можливих значень...
-
Характеристика проектованої підсистеми літального апарата - Математичне моделювання
Відомо, що проектування технічного об'єкта пов'язано зі створенням, перетворюванням і представленням у прийнятній формі образу цього об'єкта. Образ...
-
Комплекс фізико-механічних, хімічних і діелектричних властивостей поліетилену дозволяє широко застосовувати цей матеріал в багатьох галузях промисловості...
-
В даній роботі ми досліджували асинхронний двигун 4А112МА8У3. З механічних характеристик було помічено, що при швидкостях та, критичний момент АД...
-
Завдання на курсову роботу - Математичне моделювання
ЧАСТИНА 1. Побудувати форму обтічника авіаційного пускового блока мінімальної ваги з оптимальним розташуванням заданої кількості труб (N) і розрахувати...
-
Вступ - Математичне моделювання
Математичний модель проекція матриця Курсова робота з дисципліни "Графічне і геометричне моделювання та інтерактивні системи" присвячена математичному...
-
Таким чином значення балів відображає актуальність поліпшення процесу з точки зору економічної доцільності такого поліпшення, а також з точки зору...
-
Теоретичні основи оптимізаційних рішень Умови оптимальності у формі принципу максимуму дають, узагалі говорячи, достатню інформацію для рішення задачі...
-
Біологія . Необхідно знайти залежність площі молодого листка, що має форму круга, від часу. Відомо, що швидкість зміни площі в момент пропорцією площі...
-
Сировина для виробництва поліетилену Поліетилен виробляється з етилену, який, у свою чергу може бути отриманий різними методами, зокрема термічним...
-
ВСТУП - Математичне моделювання та оптимізація об'єктів хімічної технології
Математичне моделювання хіміко-технологічних процесів використовується для вибору оптимальних режимів їх роботи, побудови автоматичних систем керування...
-
Попит і пропозиція - економічній категорії товарного виробництва. Попит - представлена на ринку потреба в товарах, Пропозиція - продукт, який є на ринку...
-
ВСТУП - Основні аспекти імітаційного моделювання
Імітаційне моделювання застосовується у всіх сферах діяльності людини починаючи від моделей технічних, технологічних та організаційних систем і...
-
Визначення закону розподілу магнітної проникності в сталі обмотки ротора. У даному розділі ми розглянемо дві випадкові величини. Це магнітна проникність...
-
Ще однією можливістю підвищення зрізу фотоіонізації атома є збудження на останній стадії в автоіонізаційний стан. Автоіонізаційний стан (АС)- це стани...
-
Графіки перехідних процесів, отримані шляхом моделювання: Момент двигуна, Нм Кутова швидкість ротора, рад/с Модуль потокозчеплення статора, Вб Модуль...
-
Розв'язання систем рівнянь, Порядок виконання роботи - Вивчення математичного пакету MathСad
Матриця математичний пакет арифметичний Для розв'язання системи рівнянь з кількома невідомими треба задати початкові наближення для кожної змінної. Далі...
-
Математична модель асинхронного двигуна (1.1)-(1.4) отримана для Т-подібної схеми заміщення, що показана на рис.1, в той час як приведені в завданні...
-
(1.1) , (1.2) , (1.3) . (1.4) Запишемо математичну модель короткозамкненого асинхронного двигуна в системі координат статора (a-b), записану через...
-
Структура створюваних моделей Основний виробничий процес - це система трьох складових: постачання сировини, виробництво і збут продукції (Рис. 2.1.)....
-
Основними видами діяльності ВАТ є: - виробництво та реалізація нетканих матеріалів типу тканин; - виробництво та реалізація товарів народного...
-
ВИСНОВКИ, ЛІТЕРАТУРА - Математичне моделювання та оптимізація об'єктів хімічної технології
Завданням курсової роботи було здійснення математичного моделювання та програмування розрахунку матеріального та теплового балансу процесу полімерізації...
-
ОПИС ТЕХНОЛОГІЧНОЇ СХЕМИ - Математичне моделювання та оптимізація об'єктів хімічної технології
Процес отримання ПЕНД включає наступні операції: приготування каталітичного комплексу, форполімеризація, вигрузка суспензії і сушка форполімеру,...
-
В процесі виконання курсової роботи здійснено: - зібрання важливої вхідної, вихідної, нормативно-довідкової інформації об'єкта дослідження -...
-
Хімізм і механізм реакцій - Математичне моделювання та оптимізація об'єктів хімічної технології
Поліетилен в промисловості виробляють трьома способами: при високому тиску (поліетилен низької щільності), при середньому тиску і при низькому тиску...
-
Актуальність теми роботи. Масова комп'ютеризація і персоналізація комп'ютерної техніки в другій половині 80-х років, потреба в перебудові бізнес-процесів...
-
В залежності від якостей речовин, що використовуються для визначень, виділяють такі методи інструментального аналізу: 1) оптичні (визначення оптичних...
-
Конструкція та принцип дії турбодетандерної установки Принцип роботи турбодетандера заснований на розширенні газу в робочому колесі. Газ віддає енергію,...
-
Організаційно проектована інформаційна система представлена у вигляді автоматизованого робочого місця: АРМ працівника, відповідального за остаточну...
-
Математична модель завдання, як і структура рішення, складається із кількох етапів. Перший етап. На основі масиву даних обчислюється тенденція темпу...
-
Криві титрування - Теоретичні основи аналітичної хімії
Точність титрування зумовлена не тільки відповідністю між величинами рТ індикатора і рН точки еквівалентності, а й характером зміни рН розчину біля точки...
-
Організаційно-функціональна структура представлена на Рис. 1.1. Керівництво поточною діяльністю ВАТ здійснює Правління, до складу якого входять:...
-
Закони Кеплера руху планет - Математичне моделювання та диференціальні рівняння
Згідно закону всесвітнього тяжіння два тіла, які знаходяться на віддалі друг від друга і які мають маси і притягаються з силою (1.8) Де - константа...
-
Поняття математичного моделювання - Математичне моделювання та диференціальні рівняння
Поняття математичного моделювання трактується різними авторами по своєму. Ми будемо його пов'язувати з нашою спеціалізацією - прикладна математика. Під...
-
1. Основні вимоги до структури та оформлення текстової частини рефератів, курсових, бакалаврських та дипломних робіт для студентів спеціальності...
-
Теореми про межі. Чудові межі - Основи вищої математики
Будемо розглядати сукупність функцій, які залежать від того самого аргументу Х , при цьому Ха або Х . Доведення проводиться для одного із цих випадків,...
-
Бізнес процес моделювання Короткий опис підприємства Відкрите акціонерне товариство ВАТ Житомирська фабрика нетканих матеріалів "Тетерів", розташоване за...
-
Головною задачею титриметриного аналізу є не тільки використовувати розчин з точно відомою концентрацією (фіксанал), але й правильно визначити точку...
-
Кислотно-основне титрування (метод нейтралізації) - Теоретичні основи аналітичної хімії
Титрування кислотами та основами. Можливі такі типи-кислотно-основної взаємодії (в залежності від сили кислот і основ): - між сильною кислотою і сильною...
Теоретичні і технічні відомості, Приклад виконання курсової роботи - Математичне моделювання