Кинематический анализ методом планов., Построение плана скоростей. - Синтез и анализ машинного агрегата
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура, причем порядок их рассмотрения совпадает с направлением стрелок в формуле строения (1.3).
Построение плана скоростей.
Механизм I класса (звено1).
Угловая скорость кривошипа:
Вектор скорости точки А перпендикулярен звену 1 и направлен в соответствии с направлением модуля скорости

На плане скоростей этот вектор изображается отрезком ра=108 мм.
Тогда масштаб плана скоростей
Группа Асура II1(2,3).
Внешними точками группы являются точки А и О3, внутренней - точка В. Составляется система векторных уравнений, связывающих скорость внутренней точки со скоростями внешних точек:

По этой системе строится план скоростей, замеряются длины найденных отрезков (pb = 142 мм, ab = 138 мм) и определяются модули скоростей:
VB = (pb) - kv = 83,5 - 0,05 = 4,175 м/с;
VBА = (аb) - kv = 92 - 0,05 = 4,6 м/c.
Скорость точек S2, C и S3 находятся с помощью теоремы подобия. Составляются пропорция, связывающая чертежные размеры звена 2 (АВ, AS2) c отрезками плана скоростей:

Откуда определяется длина неизвестного отрезка

Этот отрезок откладывается на отрезке ab плана скоростей. Точка S2 является концом вектора Vs2, начала всех векторов - в полюсе р. Поэтому отрезок ps2 = 89,5 мм (определено замером) изображает вектор Vs2. Модуль вектора
Vs2 = (ps2) - kv = 89,5 - 0.05 =4,475 м/с
Для определения направления 2 отрезок ab плана скоростей устанавливается в точку В, а точка А закрепляется неподвижно (рис. 4, а); тогда становится очевидным, что 2 направлена против часовой стрелки. Для определения направления 3 отрезок рb плана скоростей устанавливается в точку С, точка О3 неподвижна (рис. 4, б), поэтому 3 направлена против часовой стрелки.
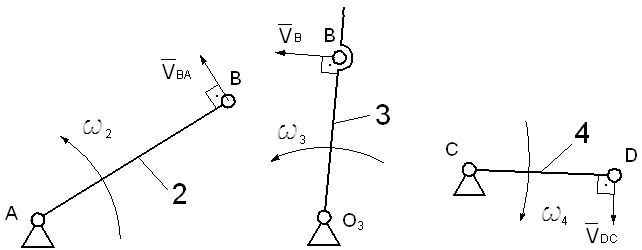
а) б) в)
Рис. 4. Определение направлений угловых скоростей
Группа Ассура II2(4,5):
Внешними точками группы являются точки С и D0 (точка D0 принадлежит стойке, внутренней - точка D, принадлежащая звеньям 4 и 5 (в дальнейшем обозначается без индексов).
По принадлежности точки D звену 5 вектор ее скорости известен по направлению: VD II x-x. Поэтому для построения плана скоростей для данной группы Ассура достаточно одного векторного уравнения
II X-X CD
В результате построения плана скоростей определяются отрезки pd= 177 мм cd= 17 мм. Модули скоростей:
VD =(pd) - kv = 94 - 0.05 = 4,7 м/с;
VDC =(cd) - kv = 32 - 0.05 = 1,6 м/с.
Скорость точки S4 определяется по принадлежности звену 4 аналогично определению скорости точки S4 по теореме подобия ...
Звено 5 совершает поступательное движение, поэтому скорости всех точек звена одинаковы и равны скорости точки D.
Величина угловой скорости звена 4 определяется аналогично предыдущему:
Для определения направления 4 отрезок cd плана скоростей устанавливается в точку D, а точка С закрепляется неподвижно (рис. 4, в); тогда становится очевидным, что 4 направлена по часовой стрелке.
Похожие статьи
-
Построение плана ускорений - Синтез и анализ машинного агрегата (шаговый транспортер)
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
Построение плана ускорений. - Синтез и анализ машинного агрегата
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура....
-
Для определения скоростей точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана скоростей механизма. План скоростей...
-
Расчет механизма на ЭВМ - Синтез и анализ машинного агрегата (насос двойного действия)
Для расчета на ЭВМ подготовлена таблица исходных данных (табл. 1.3.) Таблица 1.3. Исходные данные для расчета на ЭВМ. Обозначения в программе Обозначения...
-
ЦЕЛЬ. Найти скорости и ускорения центров масс и угловые скорости, и угловые ускорения звеньев механизма. Определение скоростей методом построения планов...
-
Выбираем произвольно полюс Р и откладываем от него параллельно перпендикуляру к звену ОА в сторону вращения кривошипа вектор, изображающий скорость в...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
Для определения ускорений точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана ускорений механизма. План ускорений...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев PИi и моменты сил инерции MИi определяются по выражениям PИi = - mI =...
-
На листе 1 проекта построена схема нагружения группы в масштабе ks = 0,016 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев Риi и моменты сил инерции Миi определяются по выражениям: (1.4) (1.5)...
-
Силовой расчет - Синтез и анализ машинного агрегата (насос двойного действия)
Определение инерционных факторов. Инерционные силовые факторы - силы инерции звеньев РИi И моменты сил инерции МИi определяются по выражениям: РИi = - m...
-
На листе 1 проекта построена схема нагружения группы в масштабе kL = 0,01 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
Синтез планетарной передачи. Синтез планетарных механизмов заключается в определении: А) чисел зубьев всех колес передачи (zi); Б) числа сателлитов (К),...
-
Построение плана положений механизма Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого...
-
Исходные данные. Кинематическая схема заданного механизма приведена на рис.2, где механизм изображен в крайних и заданном положениях (соответственно...
-
1. Механизм I класса - кривошип ОА связан со стойкой вращательной парой и равномерно вращается вокруг центра О (рис.1). - Угловое ускорения кривошипа,...
-
Исходные данные для расчета кулачкового механизма: Max = 29 град - максимально допустимый угол давления NК = 1150 об/мин - частота вращения кулачка...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис. 2, где механизм изображен в крайних и заданном положениях ( соответственно...
-
Для расчетов берем стандартные значения: m = 20 мм, ha*=0,8 , C*=0.3, х1 = х2 = 0, Z1=16, Z2=17. Рассчитываем диаметры: Делительных окружностей Основных...
-
РАСЧЕТ МАХОВИКА., Определение приведенных факторов. - Синтез и анализ машинного агрегата
Определение приведенных факторов. Приведенными факторами являются приведенный момент инерции и приведенный момент сил сопротивления. Приведенный момент...
-
Диаграмму перемещения строим в координатах S, . На оси абсцисс откладываем отрезок L0-12, изображающий полный угол поворота кривошипа. Делим этот отрезок...
-
Структурный анализ - Синтез и анализ машинного агрегата (шаговый транспортер)
Структурная схема механизма приведена на рис. 3, где подвижные звенья обозначены арабскими цифрами (1 - кривошип, 2 и 4 - шатуны. 3 - коромысло, 5 -...
-
ВЫБОР ОПТИМАЛЬНОГО ВАРИАНТА КОРОБКИ СКОРОСТЕЙ Выбор оптимального варианта коробки скоростей очень сложен. Здесь большое значение имеют группы и типы...
-
К звеньям диады прикладываем силы тяжести, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы: ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к...
-
Выбираем масштаб 1. Выбрав положение центра кулачка, чертим окружность радиусом кулачка. Откладываем в сторону противоположную вращения рабочий угол, и...
-
Определение приведенных факторов Расчет маховика, снижающего колебания системы до заданного уровня является частным случаем второй задачи динамики....
-
Графики и строим по расчетам полученных с помощью ЭВМ. Для построения этих графиков вычислим масштабы : Построение графика работ и изменения энергии,...
-
Межцентровое расстояние ( между точками О1 и О3 ) L0 = X2 + Y12 = 2,5 м Относительные параметры механизма Р1 = L1 / L0 = 0,16 P2 = L2 / L0 = 1,16 P3 = L3...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис.3, где механизм изображен в крайних и заданном положениях. Геометрические...
-
Синтез эвольвентного зубчатого зацепления. Рассматриваемые зубчатые механизмы предназначены для передачи непрерывного вращательного движения от ведущего...
-
В распечатке результатов расчета на ЭВМ (в дальнейшем называемого "машинный") приняты обозначения, которым соответствуют параметры механизма, приведенные...
-
В распечатке "машинного" расчета приняты обозначения, которым соответствуют параметры механизма, приведенные в табл. 1.7 Таблица 1.7. Соответствие...
-
Рядовая зубчатая цилиндрическая передача согласно кинематической схемы, приведенной в задании на проектирование соединяет выходной вал планетарного...
-
ВВЕДЕНИЕ - Синтез и анализ машинного агрегата
Теория механизмов и машин (ТММ) является основной проектирования работоспособных технических объектов. Основные задачи ТММ - анализ механизмов с...
Кинематический анализ методом планов., Построение плана скоростей. - Синтез и анализ машинного агрегата