НОРМАТИВНЫЕ ССЫЛКИ, Структурный анализ механизма - Структурный, кинематический и силовой анализ рычажного механизма, определение геометрических параметров и синтез зубчатого механизма
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы:
ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к построению, изложению, оформлению, содержанию и обозначению
ГОСТ 2.104-68 ЕСКД. Основные надписи
ГОСТ 2.105-68. Общие требования к текстовым документам
ГОСТ 2.106-96 ЕСКД. Текстовые документы
ГОСТ 2.301-68 ЕСКД. Форматы
ГОСТ 7.1-2003 СИБИД. Библиографическая запись. Библиографическое описание. Общие требования и правила составления
СТП КубГТУ 4.2.6-2004 СМК. Учебно-организационная деятельность Курсовое проектирование.
ГОСТ 2.770-68 ЕСКД. Обозначения условные графические в схемах. Элементы кинематики.
ГОСТ 16530-83 ЕСКД. Передачи зубчатые. Общие требования, определения и обозначения.
ГОСТ 16532-70 ЕСКД. Передачи зубчатые цилиндрические эвольвентные внешнего зацепления.
Структурный анализ механизма
Механизм - Искусственно созданная система тел, предназначенная для передачи и преобразования движения одного или нескольких твердых тел в требуемое движение других твердых тел.
Кривошип - звено, совершающее полнооборотное вращение вокруг неподвижной оси.
Коромысло - звено, совершающее качательное движение относительно неподвижной оси.
Шатун - звено, которое образует кинематические пары только с подвижными звеньями.
Ползун - звено, совершающее возвратно-поступательное движение.
Стойка (направляющая) - неподвижное звено.
Основные задачи структурного анализа механизма включают в себя:
- 1) определение количества звеньев, кинематических пар и их класса; 2) определение количества степеней свободы механизма в зависимости от числа подвижных звеньев, числа и класса кинематических пар; 3) разделение механизма на структурные группы и определение их класса.
Схема рычажного механизма глубинного насоса приведена на рисунке 1
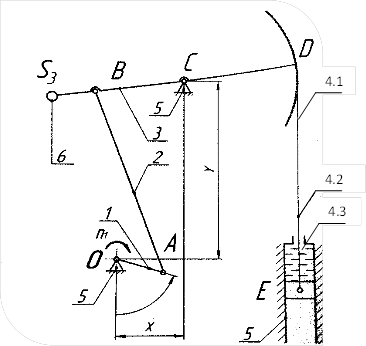
1 - кривошип, 2 - шатун, 3 - коромысло, 4 - штанга с насосом, 4.1 - трос (канатной подвески), 4.2 - штанги, 4.3 - скважинный насос, 5 - стойка (направляющая), 6 - противовес
Рисунок 1 - Схема рычажного механизма глубинного насоса
Число степеней свободы кинематической цепи W относительно одного из ее звеньев называют степенью ее подвижности. Для определения степени подвижности любой кинематической цепи необходимо подсчитать число степеней свободы всех подвижных звеньев (N), полагая их не связанными между собой. Затем из этого числа следует вычесть число связей, наложенных на звенья кинематическими парами. Кинематические пары 4-го (Р4) и 5-го (Р5) классов накладывают соответственно одну и две связи.
Структурная формула Чебышева для определения числа степеней свободы плоского механизма имеет вид

, (2.1)
Где N - число подвижных звеньев;
P5 и P4 - число кинематических пар 5 и 4 классов соответственно.
При анализе структуры механизма рекомендуется:
- А) определить W механизма и выбрать начальное звено; Б) отсоединить структурные группы нулевой подвижности, начиная с групп, наиболее отдаленных от начальных звеньев; В) следить за тем, чтобы степень подвижности кинематической цепи механизма до и после отделения структурной группы осталась неизменной; Г) помнить о том, что каждая кинематическая пара и каждое звено могут входить только в одну структурную группу или в один начальный механизм.
Структурная группа или группа Ассура - кинематическая цепь, получающая нулевую подвижность после присоединения ее к стойке.
Для групп, содержащих пары только 5-го класса, имеем

. (2.2)
Анализ структуры рычажного механизма показал, что механизм пятизвенный, подвижных звеньев 4, 1 кинематическая пара 4 класса P4=1, кинематических пар 5 класса P5=5. Кинематические пары O, A, B, C - вращательные (ВКП), кинематическая пара Е - поступательная (ПКП), D' - двухподвижная кинематическая пара (т. е. поступательная со скольжением).
Для заданного рычажного механизма число степеней свободы механизма определяем по формуле Чебышева:

=.
Так как W = 1, то механизм имеет одно ведущее звено. Ведущим звеном является кривошип ОА.
Обобщенной координатой называют независимые между собой координаты, определяющие положение всех звеньев относительно стойки.
Отсоединяем от механизма структурные группы Ассура начиная с самой удаленной от начального звена и определяем их число степеней свободы.
Для структурного элемента (звенья 4 и 5) число степеней свободы определяем по формуле (2.1):
=.
При этом число степеней свободы оставшегося механизма не изменилось.
=.
Для диады (звенья 2 и 3) число степеней свободы определяем по формуле (2.1):
=.
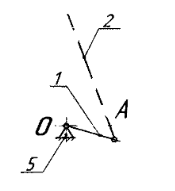
Число степеней свободы группы начальных звеньев (ГНЗ) определяем по формуле (2.1):
=.
Степень подвижности начального механизма 1-го класса (звенья 1 и 5) осталась неизменной.
Поскольку класс механизма соответствует наивысшему классу группы, входящей в его состав, то заданный рычажный механизм будет относиться к механизмам 2-го класса [1].
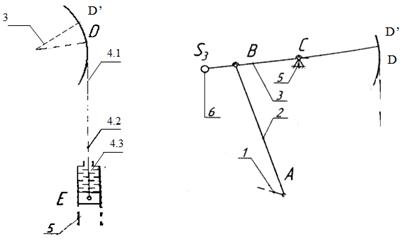
Группы Ассуры
Группа начальных звеньев
Рисунок 2 - Структурные группы рычажного механизма
Похожие статьи
-
Структурный анализ механизма - Синтез и анализ машинного агрегата (насос двойного действия)
Структурная схема механизма приведена на рис. 2, где подвижные звенья обозначены арабскими цифрами (1 - кривошип, 2 и 4 - шатуны, 3 - коромысло, 5 -...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
Структурный анализ рычажного механизма - Исследование рычажного механизма долбежного станка
Задачи структурного анализа: Определить количество звеньев и их название (для плоского механизма); А) Определить число, класс, название кинематических...
-
Исходные данные. Кинематическая схема заданного механизма приведена на рис.2, где механизм изображен в крайних и заданном положениях (соответственно...
-
Структурный анализ - Синтез и анализ машинного агрегата (шаговый транспортер)
Структурная схема механизма приведена на рис. 3, где подвижные звенья обозначены арабскими цифрами (1 - кривошип, 2 и 4 - шатуны. 3 - коромысло, 5 -...
-
Для определения ускорений точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана ускорений механизма. План ускорений...
-
В результате проведенного исследования рычажного механизма глубинного насоса произведен структурный, кинематический и силовой анализ механизма. Мы...
-
Для определения скоростей точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана скоростей механизма. План скоростей...
-
Построение рычага Жуковского Для того, чтобы построить рычаг Жуковского, необходимо взять план скоростей звеньев механизма, повернуть его на 90 и,...
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
Расчет параметров планетарного редуктора Планетарные редукторы обладают степенью подвижности W = 1 и имеют в своем составе зубчатые колеса (сателлиты) с...
-
К звеньям ГНЗ прикладываем, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение равновесия сил...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
Рядовая зубчатая цилиндрическая передача согласно кинематической схемы, приведенной в задании на проектирование соединяет выходной вал планетарного...
-
Курсовой проект по прикладной механике является самостоятельной работой студента, завершающей изучение этой дисциплины. В процессе разработки проекта...
-
В зависимости от направления шатун работает либо на растяжение, либо на сжатие. В зависимости от направления приложенных сил и шатун испытывает либо...
-
К звеньям диады прикладываем силы тяжести, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение...
-
Построение плана положений механизма Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого...
-
Кинематический анализ рычажного механизма - Исследование рычажного механизма долбежного станка
При кинематическом исследовании ставят две основные задачи: 1. Определение положений звеньев и траектории заданных точек; 2. Определение линейных и...
-
Синтез планетарной передачи. Синтез планетарных механизмов заключается в определении: А) чисел зубьев всех колес передачи (zi); Б) числа сателлитов (К),...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис. 2, где механизм изображен в крайних и заданном положениях ( соответственно...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев PИi и моменты сил инерции MИi определяются по выражениям PИi = - mI =...
-
Тип кулачкового механизма Кулачковый механизм типа II называется коромысловым и состоит из кулачка и толкателя (коромысла), который касается кулачка во...
-
Из произвольной точки (полюс) построим вектор, параллельный звену ОА и направленный от точки А к точке О, длиной 83,275 мм. Это вектор ускорения точки А...
-
Выбираем произвольно полюс Р и откладываем от него параллельно перпендикуляру к звену ОА в сторону вращения кривошипа вектор, изображающий скорость в...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис.3, где механизм изображен в крайних и заданном положениях. Геометрические...
-
Описание механизма МЕХАНИЗМ представляет собой 6-тизвенный рычажный механизм. КИНЕМАТИЧЕСКАЯ СХЕМА механизма показана на рис.1: Звено 1 - Ведущее -...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура,...
-
Синтез кулачкового механизма - Исследование рычажного механизма долбежного станка
При курсовом проектировании кулачковый механизм является частью общей кинематической схемы проектируемой машины. Он используется либо как основной...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура....
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
На листе 1 проекта построена схема нагружения группы в масштабе ks = 0,016 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев Риi и моменты сил инерции Миi определяются по выражениям: (1.4) (1.5)...
-
Синтез и анализ механизма на ЭВМ., АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА - Синтез и анализ машинного агрегата
Для расчета механизма на ЭВМ подготовлена таблица исходных данных (табл. 1.3). Таблица 1.3. Исходные данные для расчета механизма на ЭВМ Обозначение в...
-
На листе 1 проекта построена схема нагружения группы в масштабе kL = 0,01 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
1. Исходные данные: N1 = 280, n3 = 420, nH = 140. ; Колесо 3 остановлено. 2. Формула Виллиса: Где m - число внешних зацеплений z1 = 48; z2 = 24; z2' =...
-
Диаграмму перемещения строим в координатах S, . На оси абсцисс откладываем отрезок L0-12, изображающий полный угол поворота кривошипа. Делим этот отрезок...
-
Максимальная и минимальная подача: Диапазон регулирования привода по подаче: Знаменатель геометрической прогрессии размерного ряда подач: Число ступеней...
-
Расчет механизма на ЭВМ - Синтез и анализ машинного агрегата (насос двойного действия)
Для расчета на ЭВМ подготовлена таблица исходных данных (табл. 1.3.) Таблица 1.3. Исходные данные для расчета на ЭВМ. Обозначения в программе Обозначения...
-
Определение межосевого расстояния и параметров зубчатых колес первой ступени. В соответствии с рекомендациями [3] межосевое расстояние определяется по...
НОРМАТИВНЫЕ ССЫЛКИ, Структурный анализ механизма - Структурный, кинематический и силовой анализ рычажного механизма, определение геометрических параметров и синтез зубчатого механизма