ВВЕДЕНИЕ - Синтез и анализ машинного агрегата
Теория механизмов и машин (ТММ) является основной проектирования работоспособных технических объектов. Основные задачи ТММ - анализ механизмов с заданными параметрами и проектирование механизмов (определение параметров), удовлетворяющих заданным требованиям. Результаты решения задач ТММ являются исходными данными для более детального проектирования объектов методами деталей машин, сопротивления материалов и специальных дисциплин.
Объектом данного курсового проекта является машинный агрегат, структурная схема которого приведена на рис.1.
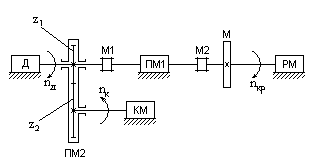
Рис. 1. Структурная схема машинного агрегата
Вращение от двигателя Д через муфту М1 передается на ведущий вал передаточного механизма ПМ1 (планетарной передачи), который изменяет частоту вращения Д nд до заданной частоты вращения кривошипа nкр рабочей машины РМ. Ведомый вал ПМ1 соединяется с валом кривошипа РМ муфтой М2. Вращение от Д на вал кулачка кулачкового механизма КМ передается передаточным механизмом ПМ2, состоящим из зубчатых колес Z1 и Z2 и преобразующим nд в заданную частоту вращения кулачка nк. РМ выполнена на базе плоского рычажного механизма; плоские КМ состоит из вращающегося кулачка и толкателя.
РМ выполняет заданную технологическую операцию, КМ выполняет вспомогательные функцию. Маховик М устанавливается на валу кривошипа РМ и служит для снижения коэффициента не равномерности вращения при установившемся движении до заданной величины.
Задача курсового проекта состоит в определении параметров, кинематических и силовых характеристик механизмов машинного агрегата, а также в определении некоторых его кинематических и силовых характеристик.
Проектируемые машинный агрегат работает следующим образом.
Компрессор предназначен для наполнения емкостей воздухом до необходимого давления, превышающего атмосферное, и соответствующего силе сопротивления Q.
Основным механизмом компрессора является шестизвенный кривошипно-коромысловый механизм, состоящий из коленчатого вала (кривошипа) 1, шатуна 2, коромысла 3, прицепного шатуна 4 и ползуна (плунжера) 5. Привод кривошипа состоит из электродвигателя и планетарного редуктора (на рисунке не показаны).
При движении плунжера 5 из крайнего левого положения направо оба клапана компрессора закрыты. Происходит сжатие кислорода, содержащегося в цилиндре воздуха от давления 0,1Qmax выше атмосферного до заданного давления Qmax. Затем выпускной клапан (нижний на схеме) открывается и газ под заданным давлением поступает в емкость. В точке "С" клапан закрывается, плунжер начинает двигаться справа налево. Происходит расширение оставшегося в Цилиндре воздуха, при котором давление понижается, оставаясь выше атмосферного (такт расширения). Затем открывается впускной клапан (верхний на схеме) и воздух при постоянном давлении так же выше атмосферного поступает в цилиндр компрессора (такт всасывания). Рабочий цикл совершается за время одного оборота коленчатого вала компрессора и повторяется после достижения плунжером крайнего левого положения. Таким образом, за время рабочего цикла сила Q сначала в тактах сжатия и нагнетания направлена против скорости ползуна 5 (является силой сопротивления), а затем при всасывании - сила Q совпадает по направлению со скоростью ползуна 5.
Управление клапанами осуществляется кулачковым механизмом, имеющим привод от электродвигателя через пару зубчатых колес
Исходные данные к заданию приведены в отдельной таблице.
Похожие статьи
-
ВВЕДЕНИЕ - Синтез и анализ машинного агрегата (шаговый транспортер)
Теория механизмов и машин (ТММ) является основой проектирования работоспособных технических объектов. Основные задачи ТММ - анализ механизмов с заданными...
-
Курсовой проект по прикладной механике является самостоятельной работой студента, завершающей изучение этой дисциплины. В процессе разработки проекта...
-
Заключение - Синтез и анализ машинного агрегата
По результатам выполнения отдельных листов курсового проекта составляем кинематическую схему машинного агрегата с изображением всех звеньев и...
-
Исходные данные. Кинематическая схема заданного механизма приведена на рис.2, где механизм изображен в крайних и заданном положениях (соответственно...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис. 2, где механизм изображен в крайних и заданном положениях ( соответственно...
-
Определение приведенных факторов Расчет маховика, снижающего колебания системы до заданного уровня является частным случаем второй задачи динамики....
-
Определение приведенных факторов. Построение диаграмм. Расчет маховика, снижающего колебания скорости системы до заданного уровня, является частным...
-
Синтез эвольвентного зубчатого зацепления. Рассматриваемые зубчатые механизмы предназначены для передачи непрерывного вращательного движения от ведущего...
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис.3, где механизм изображен в крайних и заданном положениях. Геометрические...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура....
-
В распечатке результатов расчета на ЭВМ (в дальнейшем называемого "машинный") приняты обозначения, которым соответствуют параметры механизма, приведенные...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев PИi и моменты сил инерции MИi определяются по выражениям PИi = - mI =...
-
Графики и строим по расчетам полученных с помощью ЭВМ. Для построения этих графиков вычислим масштабы : Построение графика работ и изменения энергии,...
-
РАСЧЕТ МАХОВИКА., Определение приведенных факторов. - Синтез и анализ машинного агрегата
Определение приведенных факторов. Приведенными факторами являются приведенный момент инерции и приведенный момент сил сопротивления. Приведенный момент...
-
Построение рычага Жуковского Для того, чтобы построить рычаг Жуковского, необходимо взять план скоростей звеньев механизма, повернуть его на 90 и,...
-
На листе 1 проекта построена схема нагружения группы в масштабе ks = 0,016 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
Построение плана ускорений. - Синтез и анализ машинного агрегата
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
Надежность - свойство объекта сохранять во времени в "установленных" пределах значения всех параметров, характеризующих способность выполнять требуемые...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура,...
-
Синтез и анализ механизма на ЭВМ., АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА - Синтез и анализ машинного агрегата
Для расчета механизма на ЭВМ подготовлена таблица исходных данных (табл. 1.3). Таблица 1.3. Исходные данные для расчета механизма на ЭВМ Обозначение в...
-
ЛИТЕРАТУРА. - Синтез и анализ машинного агрегата
1. Пожбелко В. И., Виницкий П. Г., Ахметшин Н. И. Курсовое проектирование по теории механизмов и машин: Учебное пособие для самостоятельной работы...
-
Расчет планетарного механизма - Синтез и анализ машинного агрегата (насос двойного действия)
Синтез планетарной передачи. Расчет передаточного отношения планетарного редуктора: IПл = nД / пКр = 920/40=23, применяем схему с двумя последовательными...
-
Построение плана ускорений - Синтез и анализ машинного агрегата (шаговый транспортер)
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
В распечатке "машинного" расчета приняты обозначения, которым соответствуют параметры механизма, приведенные в табл. 1.7 Таблица 1.7. Соответствие...
-
Классификация детали по схеме класс - подкласс - группа - тип Для правильного решения задач ориентирования существенное значение имеет классификация...
-
Синтез планетарной передачи. Синтез планетарных механизмов заключается в определении: А) чисел зубьев всех колес передачи (zi); Б) числа сателлитов (К),...
-
Синтез и анализ механизма на ЭВМ - Синтез и анализ машинного агрегата (шаговый транспортер)
Для расчета механизма на ЭВМ подготовлена таблица исходных данных (табл. 1.3). Таблица 1.3. Исходные данные для расчета механизма на ЭВМ Обозначения в...
-
В результате проведенного исследования рычажного механизма глубинного насоса произведен структурный, кинематический и силовой анализ механизма. Мы...
-
К звеньям ГНЗ прикладываем, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение равновесия сил...
-
Выбираем масштаб 1. Выбрав положение центра кулачка, чертим окружность радиусом кулачка. Откладываем в сторону противоположную вращения рабочий угол, и...
-
Построение плана положений механизма Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого...
-
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы: ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Структурный анализ механизма - Синтез и анализ машинного агрегата (насос двойного действия)
Структурная схема механизма приведена на рис. 2, где подвижные звенья обозначены арабскими цифрами (1 - кривошип, 2 и 4 - шатуны, 3 - коромысло, 5 -...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
Расчет механизма на ЭВМ - Синтез и анализ машинного агрегата (насос двойного действия)
Для расчета на ЭВМ подготовлена таблица исходных данных (табл. 1.3.) Таблица 1.3. Исходные данные для расчета на ЭВМ. Обозначения в программе Обозначения...
-
Межцентровое расстояние ( между точками О1 и О3 ) L0 = X2 + Y12 = 2,5 м Относительные параметры механизма Р1 = L1 / L0 = 0,16 P2 = L2 / L0 = 1,16 P3 = L3...
ВВЕДЕНИЕ - Синтез и анализ машинного агрегата