КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМА, Определение скоростей методом построения планов скоростей - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
ЦЕЛЬ. Найти скорости и ускорения центров масс и угловые скорости, и угловые ускорения звеньев механизма.
Определение скоростей методом построения планов скоростей
- 1. МЕХАНИЗМ I КЛАССА - кривошип ОА связан со стойкой вращательной парой и совершает равномерное вращение вокруг центра О (рис.4). - Угловая скорость кривошипа ОА определяется через частоту вращения n об/мин по формуле

В нашем примере n =3200 , тогда
- Скорость точки А Определяем, рассмотрев вращение кривошипа вокруг центра О. Модуль по формуле
VA =щ1 *lOA (6)
A =335*0,045 =15,07 м/с
Направлен вектор vA +OA в сторону угловой скорости щ1 (рис.5).
2. ШАТУНЫ АВ и АС совершают плоскопараллельное движение. У каждого шатуна известна скорость точки A. Примем ее за полюс и напишем векторные уравнения для определения скоростей vB И vC Точек В и С шатунов
VВ = VА+ V В/А, (7)
¦АВ +OA +AB
VC = VА+ V C/А, (8)
¦АC +OA +AC
В уравнениях (7) и (8) вектор vA Подчеркнут двумя чертами, так как известен по величине и по направлению. Остальные векторы подчеркнуты одной чертой, так как известны только по направлению.
3. Выбираем мv - масштаб построения плана скоростей
Пусть вектору скорости vA Соответствует отрезок pa =100мм, где Точка P - начало построения плана скоростей - Полюс плана скоростей.
Тогда масштаб построения плана скоростей (масштаб скоростей)
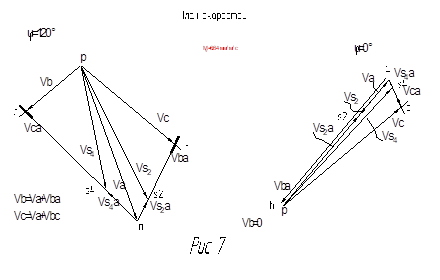
Рис 7 Построение планов скоростей. План скоростей при ф1 = 120°
- 4. Строим план скоростей для ф1 =120° (рис. 7а) по векторным уравнениям (7) и (8) - выбираем полюс p; - отложим от полюса p отрезок pa в направлении скорости vA ; - из точки а плана скоростей проводим прямую, перпендикулярно АВ в обе стороны от точки а; - из полюса p плана скоростей проводим прямую, параллельную ОВ до пересечения с прямой, проведенной из точки а; - обозначим точку пересечения через b; - расставим стрелки векторов в соответствии с векторным уравнением (7): отрезок ab определяет скорость vBA ; отрезок pb определяет скорость vB; - из точки а плана скоростей проводим прямую, перпендикулярную АС в обе стороны от точки а; - из полюс аp плана скоростей проводим прямую, параллельную ОС до пересечения с прямой, проведенной из точки a; - обозначим точку пересечения через с; - расставим стрелки векторов в соответствии с векторным уравнением (8): отрезок aс определяет скорость vCA ; отрезок pc определяет скорость vC. 5. Замеряем отрезки на плане скоростей и вычисляем модули неизвестных скоростей
Pc =43,2мм; ac =94,4мм; pb =74,1мм; ab =51,5мм;
VC =pc/ мV =43.2/6.64=6.5м с;
VAC =ac/ мV =94.4/6.64=14.2м с;
VB =pb/ мV =74.1/6.64=11.2м с;
VAB =ab/ мV =51.5/6.64=7.8м с;
- 6. Определим скорости центров масс поршней и шатунов А) Скорости центров масс поршней равны скоростям точек В и С S 3 = vB ; vS 5 = vC Б) Для определения скоростей центров масс шатунов на плане скоростей необходимо показать точки S2, S4, соответствующие центра масс S2, S4 Шатунов на схеме механизма. - С этой целью воспользуемся теоремой подобия, согласно которой всякая жесткая фигура на схеме механизма имеет себе подобную на плане скоростей и плане ускорений притом же направлении обхода контура. Следовательно, положения точек на плане скоростей или ускорений можно определять из пропорции соответствующих отрезков.
В исходных данных заданы отношения, определяющие положения центров масс. Исходя из данных, по теореме подобия можно записать следующие пропорции
As2/ab =AS2/AB, = lAS2/lAB
As4/ab =AS4/AB, = lAS4/lAB
Отсюда получаем отрезки
As2=ab * lAS2/lAB,
As4=aс * lAS4/lAB,
В нашем примере при ф=120°
AS4 =94,4*0,28 =26.4мм;
AS2 =51,5*0,28 =14,4мм;
- - Откладываем отрезки as2 И as4 На плане скоростей (рис.7а). Получим точки S2 И S4. - Соединим с полюсом p точки S2 , S4 На плане скоростей, получим отрезки ps2 И ps4, изображающие соответственно скорости центров масс шатунов vS2, vS4 В масштабе мv - Для определения численных значений скоростей центров масс необходимо измерить соответствующие отрезки на плане скоростей и разделить на масштаб м. Получим для ф1 =120°.
V S4 =p S4/ мV =77/6.64=11.6 мс;
V S2 =a S2/ мV =90.6/6.64=13.6 мс;
- 7. Перенесем с плана скоростей (рис.7а) на схему механизма (рис.5) векторы, изображающие скорости vB и vBA ; vC и vCA. 8. Определим угловые скорости шатунов
Модули угловых скоростей шатунов, совершающих плоскопараллельное движение, вычисляются по формулам
Подставляя найденные в п.5 значения скоростей, получаем
Щ4 = щAC=14.2/0.161=88.2 радс
Щ2 = щAB=7,8/0.161=48.4 радс
План скоростей при ф=0°.
- 9. Построим план скоростей для верхнего "мертвого" положения первого поршня в точке B0 (ф=0°) (рис.7б). - Векторные уравнения (7) и (8) остаются без изменений. - Из полюса p откладываем отрезок pa = 100 мм, перпендикулярный ОА0, соответствующий скорости vA Точки А0. Для упрощения обозначений индекс (0) при построении планов скоростей и ускорений в "мертвом" положении опускаем. - В соответствии с уравнением (7) из точки а проводим прямую, перпендикулярную А0В0, а из полюса p - прямую, параллельную ОВ0. - Обозначим точку пересечения прямых через b. - Так как в рассматриваемом положении отрезкиОА0 иА0В0 вытянуты в одну линию, перпендикуляры к ним pa и ab, изображающие скорости vA И vAB, тоже будут вытянуты в одну линию, а отрезок pb, изображающий скорость vB , выродится в точку, совпадающую с полюсом. Следовательно, скорость vBA Будет изображаться отрезком ab направленным от а к b.
На рис. 7б направление скоростей vA, vC, vBA Показано дополнительными стрелками.
- - Из точки а плана скоростей проводим прямую, перпендикулярную А0С0 в соответствии с уравнением (8) в обе стороны. - Из полюса p плана скоростей проводим прямую, параллельную ОС0 до пересечения с прямой, проведенной из точки а. - Обозначим точку пересечения через с. - При угле развала цилиндров в= 100° прямая OC0 Не перпендикулярна VA (рис.6).
Следовательно:
- - отрезок pc, изображающий вектор vC0 не совпадает с направлением вектора скорости vA; - отрезок ас не выродится в точку и вектор скорости vC ? vA. 10. Находим численные значения скоростей
Pb =0мм; ab =100мм; pc =93,5мм; ac =18,1мм;
VB =pb/ мV =0/6.64=0м с;
VAB =ab/ мV =100/6.64=15.1м с;
VC =c/ мV =93,5/6.64=14,1м с;
VAC =ac/ мV =18,1/6.64=2,7м с.
11. Определим скорости центров масса) Скорости центров масс поршней равны скоростям точек В и С, т. е.
VS3 = vB =0; vS5 = vC =14,1
Б) Скорости центров масс шатунов определяем, используя теорему подобия по формулам (9)
As2=ab * lAS2/lAB;
As4=aс * lAS4/lAB;
AS2 =100*0,28 =28мм;
AS4 =18,1*0,28 =5.1мм;
- - Откладываем на плане скоростей отрезки as2 И as4 (рис.7б), получаем точки S2 И S4. - Соединим полюс p с точками s2 И S4 На плане скоростей, получим отрезки ps2 И ps4, изображающие соответственно скорости центров масс шатунов vS2 И vS4 В масштабе мV. - Замеряем отрезки ps2 И ps4 На плане скоростей и вычисляем модули скоростей центров масс
Ps2 = 66,7мм; ps4 = 97,5мм
V S2 =p s2/ мV =72/6.64=10,8м с
V S2 =p s4/ мV =97,9/6.64=14.7м с
- 12. Перенесем с плана скоростей (рис.7б) на схему механизма (рис.6) векторы, изображающие скорости
VBA ; vC . vBA + B0 A0; vC //OC0.
- 13. Определим угловые скорости шатунов. - Модули угловых скоростей шатунов, совершающих плоскопараллельное движение, вычисляются по формулам (10)
Щ2 = щAB=15.1/0.161=93,8 рад с
Щ4 = щAС=2,7/0.161=16,8 рад с
Похожие статьи
-
1. Механизм I класса - кривошип ОА связан со стойкой вращательной парой и равномерно вращается вокруг центра О (рис.1). - Угловое ускорения кривошипа,...
-
Для определения скоростей точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана скоростей механизма. План скоростей...
-
Определение размеров кривошипа и шатунов Радиус кривошипа LOA =r определяется через ход поршня Н по формуле R =H/2 (2) Длины шатунов LAB = lAC =l...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура,...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура....
-
Выбираем произвольно полюс Р и откладываем от него параллельно перпендикуляру к звену ОА в сторону вращения кривошипа вектор, изображающий скорость в...
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
ЦЕЛЬ : определение усилий (реакций) в кинематических парах и уравновешивающей силы (уравновешивающего момента). Силовой расчет проводится...
-
Построение плана положений механизма Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого...
-
ВЫБОР ОПТИМАЛЬНОГО ВАРИАНТА КОРОБКИ СКОРОСТЕЙ Выбор оптимального варианта коробки скоростей очень сложен. Здесь большое значение имеют группы и типы...
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
Силовой расчет диады 4-5 - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
Силовой расчет диады 4-5 производится точно так же как диады 2-3. 1. Изобразим диаду 4-5 в прежнем масштабе длин мl = 1000 мм/м. 2. Покажем все силы,...
-
Для определения ускорений точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана ускорений механизма. План ускорений...
-
Расчет механизма на ЭВМ - Синтез и анализ машинного агрегата (насос двойного действия)
Для расчета на ЭВМ подготовлена таблица исходных данных (табл. 1.3.) Таблица 1.3. Исходные данные для расчета на ЭВМ. Обозначения в программе Обозначения...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
Построение плана ускорений. - Синтез и анализ машинного агрегата
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
ИСХОДНЫЕДАННЫЕ - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
1 Описание двигателя На схеме обозначено: 1 - кривошип, 2, 4 - шатуны, 3, 5 - поршни (ползуны), 6 - неподвижная часть механизма - стойка. Стрелкой...
-
Тип кулачкового механизма Кулачковый механизм типа II называется коромысловым и состоит из кулачка и толкателя (коромысла), который касается кулачка во...
-
Кинематический анализ рычажного механизма - Исследование рычажного механизма долбежного станка
При кинематическом исследовании ставят две основные задачи: 1. Определение положений звеньев и траектории заданных точек; 2. Определение линейных и...
-
1 Изобразим кривошип в том же масштабе длин На рис. 14а. 2 Покажем силы, действующие на кривошип. При установившемся режиме работы на кривошип в нашем...
-
Усилия во внутренних кинематических парах возникают согласно закону равенства действия и противодействия, т. е. попарно равные по модулю, направленные по...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
Выбираем масштаб построения эвольвентного зубчатого зацепления: Порядок построения зубчатого зацепление: 1. откладываем aW - межцентровое расстояние; 2....
-
Рядовая зубчатая цилиндрическая передача согласно кинематической схемы, приведенной в задании на проектирование соединяет выходной вал планетарного...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Описание механизма МЕХАНИЗМ представляет собой 6-тизвенный рычажный механизм. КИНЕМАТИЧЕСКАЯ СХЕМА механизма показана на рис.1: Звено 1 - Ведущее -...
-
Звенья Моменты инерции [кгм2 ] Звено 1 - невесомый тонкий стержень IS1 =0 Звено 2 - тонкий стержень IS2 =8*10-3 Звено 3 - поступательное движение IS3 =0...
-
Построение рычага Жуковского Для того, чтобы построить рычаг Жуковского, необходимо взять план скоростей звеньев механизма, повернуть его на 90 и,...
-
К звеньям ГНЗ прикладываем, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение равновесия сил...
-
Из произвольной точки (полюс) построим вектор, параллельный звену ОА и направленный от точки А к точке О, длиной 83,275 мм. Это вектор ускорения точки А...
-
К звеньям диады прикладываем силы тяжести, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение...
-
Синтез кулачкового механизма - Исследование рычажного механизма долбежного станка
При курсовом проектировании кулачковый механизм является частью общей кинематической схемы проектируемой машины. Он используется либо как основной...
-
Расчет параметров планетарного редуктора Планетарные редукторы обладают степенью подвижности W = 1 и имеют в своем составе зубчатые колеса (сателлиты) с...
-
Диаграмму перемещения строим в координатах S, . На оси абсцисс откладываем отрезок L0-12, изображающий полный угол поворота кривошипа. Делим этот отрезок...
-
1. Откладываем от делительной окружности( с учетом знака) расчетное смещение x1M и проводится делительная прямая исходного производящего контура реечного...
-
Передаточную функцию системы по задающему воздействию - главную передаточную функцию получаем следующим образом: Передаточная функция системы по...
-
Построение плана ускорений - Синтез и анализ машинного агрегата (шаговый транспортер)
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
Синтез планетарной передачи. Синтез планетарных механизмов заключается в определении: А) чисел зубьев всех колес передачи (zi); Б) числа сателлитов (К),...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМА, Определение скоростей методом построения планов скоростей - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС