КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА, Построение плана положений механизма - Структурный, кинематический и силовой анализ рычажного механизма, определение геометрических параметров и синтез зубчатого механизма
Построение плана положений механизма
Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого определяется положение звеньев, скорости и ускорения механизма.
План положений механизма (ППМ) это графическое отображение механизма в выбранном масштабе при заданном положении ведущего (начального) звена. ППМ строится графическим методом (методом засечек). Под масштабом будем понимать отношение истинной длины звена (М) к отрезку в Мм, изображающему это звено. Определим масштаб ППМ, который рационально рассчитывать с учетом наибольшего звена (коромысла 3) и возможности разместить план на ј листа формата А1. При заданных размерах звеньев ППМ изображаем в масштабе




= = 0,0175 (3.1)

Где - длина звена CS3;
CS3 - отрезок в миллиметрах, изображающий звено на ППМ.
Для определения численного значения отрезков, изображающих звенья механизма на ППМ необходимо их истинный размер разделить на выбранный масштаб длины. Находим отрезки изображающие звенья механизма на чертеже и результаты сводим в таблицу 2.
Таблица 2 - Размеры звеньев механизма на ППМ
|
OA, мм |
AB, мм |
BC, мм |
CD, мм |
CS3, мм |
X, мм |
Y, мм |
|
40 |
120 |
113 |
142 |
200 |
56 |
114 |
По полученным значениям длин звеньев при заданном угле поворота кривошипа =43? строим ППМ рычажного механизма в основном положении.
Изображаем механизм в крайних положениях, т. е. таких, когда ведомое звено 3 может двигаться только в одном направлении. Одно крайнее (верхнее) положение получается, если из т. О сделать засечку на траектории движения точки В коромысла 3 радиусом (AB-OA) = 80 мм. Другое крайнее (нижнее) положение получается засечкой радиусом (AB+OA) = 160 мм.
Получаем верхнюю D1 (ВМТ) и нижнюю D2 (НМТ) мертвые точки ведомого звена. Расстояние между ними называется ходом штанги и определяется по зависимости

(3.2)
Где H - отрезок, изображающий ход штанги на ППМ,
Рабочий ход выходного звена механизма начинается от НМТ и заканчивается в ВМТ. Крайние положения остальных звеньев механизма на плане положений механизма показываем пунктирными линиями.
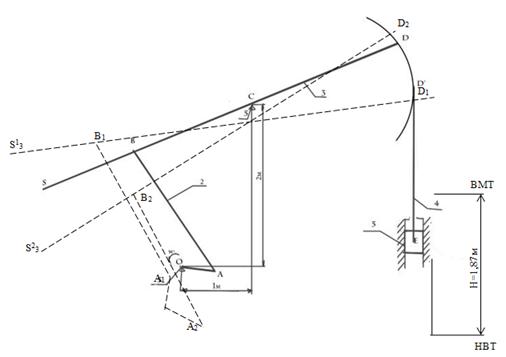
Рисунок 3 - План положений механизма
Похожие статьи
-
Исходные данные Кинематическая схема заданного механизма приведена на рис. 2, где механизм изображен в крайних и заданном положениях ( соответственно...
-
Исходные данные. Кинематическая схема заданного механизма приведена на рис.2, где механизм изображен в крайних и заданном положениях (соответственно...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис.3, где механизм изображен в крайних и заданном положениях. Геометрические...
-
К звеньям ГНЗ прикладываем, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение равновесия сил...
-
К звеньям диады прикладываем силы тяжести, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение...
-
Для определения скоростей точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана скоростей механизма. План скоростей...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
Построение рычага Жуковского Для того, чтобы построить рычаг Жуковского, необходимо взять план скоростей звеньев механизма, повернуть его на 90 и,...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
Для определения ускорений точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана ускорений механизма. План ускорений...
-
Из произвольной точки (полюс) построим вектор, параллельный звену ОА и направленный от точки А к точке О, длиной 83,275 мм. Это вектор ускорения точки А...
-
ЦЕЛЬ. Найти скорости и ускорения центров масс и угловые скорости, и угловые ускорения звеньев механизма. Определение скоростей методом построения планов...
-
Рядовая зубчатая цилиндрическая передача согласно кинематической схемы, приведенной в задании на проектирование соединяет выходной вал планетарного...
-
В результате проведенного исследования рычажного механизма глубинного насоса произведен структурный, кинематический и силовой анализ механизма. Мы...
-
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы: ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к...
-
Кинематический анализ рычажного механизма - Исследование рычажного механизма долбежного станка
При кинематическом исследовании ставят две основные задачи: 1. Определение положений звеньев и траектории заданных точек; 2. Определение линейных и...
-
Тип кулачкового механизма Кулачковый механизм типа II называется коромысловым и состоит из кулачка и толкателя (коромысла), который касается кулачка во...
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
Выбираем произвольно полюс Р и откладываем от него параллельно перпендикуляру к звену ОА в сторону вращения кривошипа вектор, изображающий скорость в...
-
Курсовой проект по прикладной механике является самостоятельной работой студента, завершающей изучение этой дисциплины. В процессе разработки проекта...
-
Графики и строим по расчетам полученных с помощью ЭВМ. Для построения этих графиков вычислим масштабы : Построение графика работ и изменения энергии,...
-
Определение размеров кривошипа и шатунов Радиус кривошипа LOA =r определяется через ход поршня Н по формуле R =H/2 (2) Длины шатунов LAB = lAC =l...
-
Диаграмму перемещения строим в координатах S, . На оси абсцисс откладываем отрезок L0-12, изображающий полный угол поворота кривошипа. Делим этот отрезок...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура,...
-
Для расчетов берем стандартные значения: m = 20 мм, ha*=0,8 , C*=0.3, х1 = х2 = 0, Z1=16, Z2=17. Рассчитываем диаметры: Делительных окружностей Основных...
-
Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура....
-
Расчет параметров планетарного редуктора Планетарные редукторы обладают степенью подвижности W = 1 и имеют в своем составе зубчатые колеса (сателлиты) с...
-
В зависимости от направления шатун работает либо на растяжение, либо на сжатие. В зависимости от направления приложенных сил и шатун испытывает либо...
-
Синтез и анализ механизма на ЭВМ., АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА - Синтез и анализ машинного агрегата
Для расчета механизма на ЭВМ подготовлена таблица исходных данных (табл. 1.3). Таблица 1.3. Исходные данные для расчета механизма на ЭВМ Обозначение в...
-
На листе 1 проекта построена схема нагружения группы в масштабе ks = 0,016 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
Построение плана ускорений. - Синтез и анализ машинного агрегата
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
-
1. Механизм I класса - кривошип ОА связан со стойкой вращательной парой и равномерно вращается вокруг центра О (рис.1). - Угловое ускорения кривошипа,...
-
На листе 1 проекта построена схема нагружения группы в масштабе kL = 0,01 м/мм. Силовой расчет группы состоит из четырех этапов. 1. Составляется сумма...
-
Межцентровое расстояние ( между точками О1 и О3 ) L0 = X2 + Y12 = 2,5 м Относительные параметры механизма Р1 = L1 / L0 = 0,16 P2 = L2 / L0 = 1,16 P3 = L3...
-
Определение приведенных факторов Расчет маховика, снижающего колебания системы до заданного уровня является частным случаем второй задачи динамики....
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев PИi и моменты сил инерции MИi определяются по выражениям PИi = - mI =...
-
Определение инерционных факторов Инерционные силовые факторы - силы инерции звеньев Риi и моменты сил инерции Миi определяются по выражениям: (1.4) (1.5)...
-
Исходные данные для расчета кулачкового механизма: Max = 29 град - максимально допустимый угол давления NК = 1150 об/мин - частота вращения кулачка...
-
Построение плана ускорений - Синтез и анализ машинного агрегата (шаговый транспортер)
Механизм I класса (звено 1): Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому ее ускорение есть сумма нормального и тангенциального...
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА, Построение плана положений механизма - Структурный, кинематический и силовой анализ рычажного механизма, определение геометрических параметров и синтез зубчатого механизма