Уравнение динамики АСУ СЭУ, Исходные данные, Нахождение оптимального переходного процесса АСУ - Устранение неисправностей автоматизированных систем управления судового двигателя
Исходные данные
1) Уравнение динамики АСУ
,
Где ц - относительное изменение частоты вращения;
М - относительное изменение подачи топлива;
Л - относительное изменение нагрузки.
2) Для регулятора
Регулятор "ПИ+П" D-100.
= 0,3
= 0,5
= 0,7
= 1
J = 0.1
= 0,8
= 0,2
= 1.
3) Для удобства работы с ЭВМ преобразуем уравнение динамики регулятора вида
,
Вывод которого изложен в разделе №3, в вид:
Нахождение оптимального переходного процесса АСУ
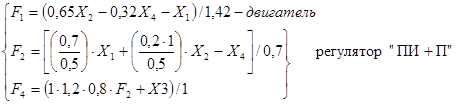
Для нахождения оптимального процесса регулирования преобразуем систему уравнений в машинный вид:
Регулятор "ПИ+П"
;;


;;
;
;.
Поиск будем проводить путем изменения параметров настройки регулятора:
КШ - коэффициент усиления ГОС;
КО. С - коэффициент усиления ЖОС;
ТS - время сервомотора;
Тi - время изодрома.
После работы с программой, которая находится:
Диск С;
Раздел Nasr;
Univtrsal difr;
GW basic;
Difr 02.
Определили, что оптимальными параметрами настройки являются:
КШ = 0,87;
КО. С = 0,1;
ТS = 0,1;
Тi = 3.
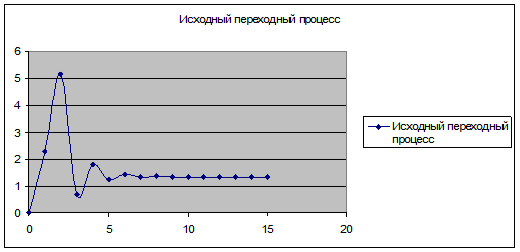
Из графика (рис. 11) видно, что при таких значениях настроенных параметров переходный процесс удовлетворяет условиям 3 класса точности:
Динамический заброс допускается до 10%;
Время переходного процесса до 10 сек.
Рис.7 График переходного процесса АСУ СЭУ
Похожие статьи
-
Это уравнение, определяющее зависимость между выходной УО. С и входной ХО. С координатами, получим как уравнение движения кинематического звена. Связь...
-
Исходные данные Номинальная мощность двигателя 20500, Номинальная скорость вращения вала двигателя 2.03 , Приведенный момент вращающихся масс 238,...
-
Требования, предъявленные к регуляторам частоты вращения, зависят от условий эксплуатации систем регулирования в целом с учетом назначения двигателя и...
-
В практической деятельности судовой механик осваивает состав, принцип действия, правила эксплуатации и технического обслуживания, методы статической и...
-
Для определения возможных установившихся режимов работы главной энергетической установки выполним графическое совмещение характеристик двигателя с...
-
Для построения винтовых характеристик воспользуемся формулой: (1) Где - мощность, срабатываемая винтом; - скорость вращения винта; - постоянный...
-
Изменение выходной координаты усилителя УУ. С определяется движением поршня сервомотора. Движение поршня зависит от двух факторов: от действующих на...
-
Уравнение динамики измерителя, представляющее аналитическую зависимость изменения во времени его выходной, можно получить на основе принципа Даламбера,...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Для нахождения значений коэффициента определим вначале величины частной производной. С этой целью перестроим винтовые характеристики (рис. 2) в...
-
Рис. 5 Изодромная обратная связь Как видно из схемы, представленной на рис. 9, связь состоит из двух последовательно соединенных звеньев: механического...
-
Правильная ориентация использования и ТО, современный ремонт и настройка автоматических регуляторов обеспечивают длительную безотказную их работу. Для...
-
Рис. 1. Кинематическая схема всережимного регулятора двигателей Д-100. Регулятор двигателей Д100. Регулятор числа оборотов двигателей Д100 получил...
-
Для определения коэффициента надо знать значение частной производной. Эти значения можно получить путем графического дифференцирования характеристик...
-
Для построения внешней и частичных характеристик двигателя воспользуемся рекомендуемой формулой: Где - номинальная частота вращения вала; - текущее...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Определение передаточной функции объекта управления Проведение эксперимента начинают с установки на объекте выбранного режима работы, который...
-
Расчет нелинейных систем автоматического управления
1. Задание для расчета нелинейной САУ Фазовый плоскость траектория автоколебание 1. Исследовать динамические режимы системы методом фазовой плоскости для...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Себестоимость продукции - это выражение в денежной форме затраты предприятия на производство и реализацию продукции. Себестоимость показывает, во что...
-
Настройка контроллера и управление контроллером осуществляются через персональный или карманный компьютер при помощи программы "AK2-Service Tool"....
-
В ходе данной работы необходимо установить свойства системы автоматического управления, определить ее временные и частотные характеристики, а также...
Уравнение динамики АСУ СЭУ, Исходные данные, Нахождение оптимального переходного процесса АСУ - Устранение неисправностей автоматизированных систем управления судового двигателя