Влияние параметров настройки на процесс регулирования - Устранение неисправностей автоматизированных систем управления судового двигателя
Меняем кО. С (исходный 1)
|
1 |
0,3 |
0,5 |
1,2 |
1,5 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
2,254 |
2,254 |
2,254 |
2,254 |
2,254 |
|
2 |
5,159 |
4,38 |
4,611 |
5,367 |
5,667 |
|
3 |
0,691 |
-0,713 |
-0,29 |
1,056 |
1,579 |
|
4 |
1,804 |
1,131 |
1,311 |
2,012 |
2,329 |
|
5 |
1,242 |
0,112 |
0,459 |
1,53 |
1,941 |
|
6 |
1,426 |
0,624 |
0,844 |
1,665 |
2,023 |
|
7 |
1,324 |
0,315 |
0,62 |
1,589 |
1,973 |
|
8 |
1,361 |
0,474 |
0,726 |
1,612 |
1,985 |
|
9 |
1,343 |
0,388 |
0,671 |
1,601 |
1,979 |
|
10 |
1,35 |
0,431 |
0,697 |
1,605 |
1,98 |
|
11 |
1,347 |
0,409 |
0,684 |
1,603 |
1,979 |
|
12 |
1,348 |
0,42 |
0,69 |
1,603 |
1,98 |
|
13 |
1,347 |
0,415 |
0,687 |
1,603 |
1,979 |
|
14 |
1,347 |
0,417 |
0,689 |
1,603 |
1,979 |
|
15 |
1,347 |
0,416 |
0,688 |
1,603 |
1,979 |
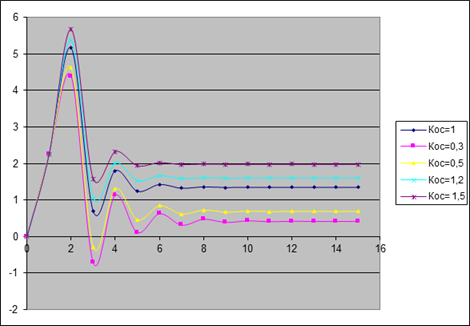
Рис.8 . Влияние Кос на переходный процесс
Меняем TS (исходное 0,7)
|
0,7 |
0,3 |
0,5 |
0,9 |
1,1 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
2,254 |
2,254 |
2,254 |
2,254 |
2,254 |
|
2 |
5,159 |
2,221 |
3,469 |
6,624 |
7,811 |
|
3 |
0,691 |
1,952 |
1,913 |
-0,325 |
-0,734 |
|
4 |
1,804 |
1,503 |
1,31 |
2,345 |
2,233 |
|
5 |
1,242 |
1,39 |
1,453 |
1,07 |
1,448 |
|
6 |
1,426 |
1,361 |
1,343 |
1,437 |
1,129 |
|
7 |
1,324 |
1,352 |
1,356 |
1,357 |
1,505 |
|
8 |
1,361 |
1,349 |
1,348 |
1,329 |
1,294 |
|
9 |
1,343 |
1,348 |
1,348 |
1,363 |
1,35 |
|
10 |
1,35 |
1,348 |
1,348 |
1,34 |
1,359 |
|
11 |
1,347 |
1,347 |
1,347 |
1,35 |
1,338 |
|
12 |
1,348 |
1,347 |
1,347 |
1,347 |
1,351 |
|
13 |
1,347 |
1,347 |
1,347 |
1,347 |
1,347 |
|
14 |
1,347 |
1,347 |
1,347 |
1,347 |
1,347 |
|
15 |
1,347 |
1,347 |
1,347 |
1,347 |
1,348 |
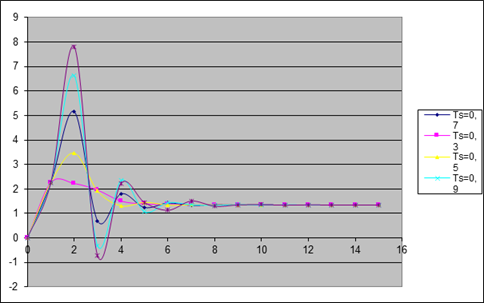
Рис.9. Влияние Ts на переходный процесс
|
0,8 |
0,3 |
0,5 |
1 |
1,5 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
2,254 |
2,254 |
2,254 |
2,254 |
2,254 |
|
2 |
5,159 |
3,659 |
4,297 |
5,676 |
6,801 |
|
3 |
0,691 |
0,216 |
0,349 |
0,989 |
1,883 |
|
4 |
1,804 |
1,638 |
1,785 |
1,759 |
1,647 |
|
5 |
1,242 |
1,171 |
1,152 |
1,311 |
1,416 |
|
6 |
1,426 |
1,501 |
1,491 |
1,394 |
1,37 |
|
7 |
1,324 |
1,239 |
1,27 |
1,343 |
1,354 |
|
8 |
1,361 |
1,429 |
1,396 |
1,352 |
1,349 |
|
9 |
1,343 |
1,289 |
1,32 |
1,347 |
1,348 |
|
10 |
1,35 |
1,389 |
1,364 |
1,348 |
1,348 |
|
11 |
1,347 |
1,289 |
1,334 |
1,347 |
1,347 |
|
12 |
1,348 |
1,387 |
1,355 |
1,347 |
1,347 |
|
13 |
1,347 |
1,321 |
1,343 |
1,347 |
1,347 |
|
14 |
1,347 |
1,365 |
1,35 |
1,347 |
1,347 |
|
15 |
1,347 |
1,336 |
1,346 |
1,347 |
1,347 |
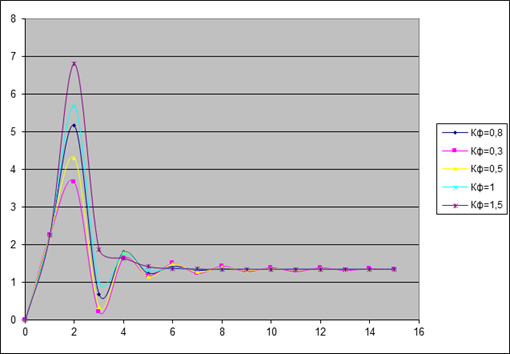
Рис.10. Влияние кш на переходный процесс
|
1 |
0,3 |
0,5 |
1,1 |
1,5 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
2,254 |
2,254 |
2,254 |
2,254 |
2,254 |
|
2 |
5,159 |
4,514 |
4,848 |
5,216 |
5,275 |
|
3 |
0,691 |
-1,455 |
-0,719 |
1,053 |
1,464 |
|
4 |
1,804 |
3,051 |
2,288 |
1,847 |
1,973 |
|
5 |
1,242 |
0,189 |
0,865 |
1,339 |
1,497 |
|
6 |
1,426 |
2,026 |
1,565 |
1,437 |
1,491 |
|
7 |
1,324 |
1,007 |
1,262 |
1,344 |
1,392 |
|
8 |
1,361 |
1,483 |
1,375 |
1,363 |
1,381 |
|
9 |
1,343 |
1,319 |
1,342 |
1,347 |
1,36 |
|
10 |
1,35 |
1,33 |
1,346 |
1,35 |
1,356 |
|
11 |
1,347 |
1,391 |
1,351 |
1,347 |
1,351 |
|
12 |
1,348 |
1,314 |
1,345 |
1,348 |
1,35 |
|
13 |
1,347 |
1,368 |
1,349 |
1,347 |
1,348 |
|
14 |
1,347 |
1,336 |
1,347 |
1,348 |
1,348 |
|
15 |
1,347 |
1,353 |
1,348 |
1,347 |
1,348 |
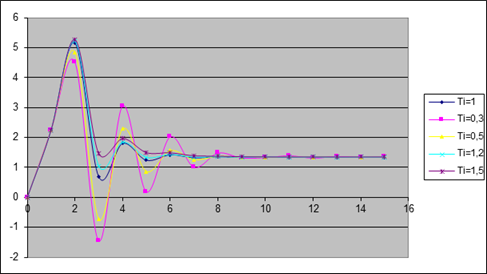
Рис.11. Влияние Ti на переходный процесс
Судовой двигатель автоматизированный энергетический
Оценку влияния параметров настройки на процесс регулирования будем проводить по четырем основным критериям:
- 1. Динамический заброс ц1 2. Степень колебательности (нерегулирования, ц2/ ц1 3. Время регулирования ТПП 4. Остаточная неравномерность
I. Влияние КОС - коэффициента усиления ЖОС (рис.16)
Для более наглядного представления влияния кО. С на процесс регулирования "ПИ+П" регулятора сделаем обобщение:
С увеличением кО. С возрастает динамический заброс ц1 .
С увеличением кО. С возрастает остаточная неравномерность дст.

ТПП - время регулирования при увеличении кО. С до оптимального значения уменьшается при дальнейшем увеличении > ТПП - увеличивается.
Влияние ТS - времени сервомотора (рис. 17)
При уменьшении ТS уменьшается динамический заброс, степень неравномерности, степень колебательности и время регулирования. Но нельзя забывать, что конструктивно практически невозможно получить очень маленькие ТS и то, что ТS нельзя уменьшать до бесконечности, т.к. при его уменьшении меньше ТS критического система теряет устойчивость.
III. Влияние изменения кш (рис. 18) коэффициента усиления кОС
Постоянство дст при изменении кш объясняется тем, что он действует только в начале процесса регулирования, а потом его действие исчезает вместе с действием НОС. При увеличении кш увеличивается динамический заброс, но при этом уменьшается степень колебательности.
ТПП - время регулирования ведет себя таким образом. При уменьшении кш до какого-то оптимального значения ТПП уменьшается, затем при дальнейшем уменьшении кш ТПП увеличивается.
IV. Влияние изменения Тi - времени изодрома на процесс регулирования
При увеличении Тi увеличивается динамический заброс и незначительно возрастает остаточная неравномерность. При уменьшении Тi увеличивается степень колебательности.
ТПП - время регулирования при увеличении Тi - сначала постепенно снижается, затем практически не меняется после.

Похожие статьи
-
Требования, предъявленные к регуляторам частоты вращения, зависят от условий эксплуатации систем регулирования в целом с учетом назначения двигателя и...
-
Исходные данные 1) Уравнение динамики АСУ , Где ц - относительное изменение частоты вращения; М - относительное изменение подачи топлива; Л -...
-
Правильная ориентация использования и ТО, современный ремонт и настройка автоматических регуляторов обеспечивают длительную безотказную их работу. Для...
-
В практической деятельности судовой механик осваивает состав, принцип действия, правила эксплуатации и технического обслуживания, методы статической и...
-
Для построения винтовых характеристик воспользуемся формулой: (1) Где - мощность, срабатываемая винтом; - скорость вращения винта; - постоянный...
-
Для построения внешней и частичных характеристик двигателя воспользуемся рекомендуемой формулой: Где - номинальная частота вращения вала; - текущее...
-
Изменение выходной координаты усилителя УУ. С определяется движением поршня сервомотора. Движение поршня зависит от двух факторов: от действующих на...
-
Рис. 1. Кинематическая схема всережимного регулятора двигателей Д-100. Регулятор двигателей Д100. Регулятор числа оборотов двигателей Д100 получил...
-
Для нахождения значений коэффициента определим вначале величины частной производной. С этой целью перестроим винтовые характеристики (рис. 2) в...
-
Для определения коэффициента надо знать значение частной производной. Эти значения можно получить путем графического дифференцирования характеристик...
-
Рис. 5 Изодромная обратная связь Как видно из схемы, представленной на рис. 9, связь состоит из двух последовательно соединенных звеньев: механического...
-
Исходные данные Номинальная мощность двигателя 20500, Номинальная скорость вращения вала двигателя 2.03 , Приведенный момент вращающихся масс 238,...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Уравнение динамики измерителя, представляющее аналитическую зависимость изменения во времени его выходной, можно получить на основе принципа Даламбера,...
-
Для определения возможных установившихся режимов работы главной энергетической установки выполним графическое совмещение характеристик двигателя с...
-
Для составления математической модели объекта проведем анализ всех составных элементов структурной схемы и рассчитаем параметры их передаточных функций....
-
Это уравнение, определяющее зависимость между выходной УО. С и входной ХО. С координатами, получим как уравнение движения кинематического звена. Связь...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед...
-
При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления. Под структурой управления понимается...
-
Средства контроля АК-2 - Модули. Базовый модуль - предназначен для управления центральной холодильной машиной Модули расширения. В сложных системах могут...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Автоматизация оборудования позволяет увеличить его производительность, сократить затраты материалов, топлива и энергии за счет более рационального их...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Для анализа кристаллизационного процесса был выполнен ДТА сплавов системы Al - Si с содержанием Si: 0.25, 0.5, 1.0, 3.0 и 5.0 %. Основные параметры...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
Когда используются аналоговые выходы, может регулироваться скорость вентиляторов, например, при помощи преобразователя частоты типа AKD. Общее...
-
Агрегат электролитического лужения (линия лужения) АЭЛ-1200/III предназначен для нанесения на поверхность стальной холоднокатаной полосы олова...
-
Производительность поролона автоматизированной системы управления составляет 400 м3/час. Количество рабочих часов в году равно 2000 ч. В системе...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Анализ условий труда Анализ условий труда на участке производства поролона, приводит к заключению о потенциальной опасности данного участка. Суть...
-
В инженерной практике принято промышленные холодильные камеры описывать линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами....
-
Датчик Скорости MD-256 изображенный на рисунке 4.4 предназначен для работы с конвейерами. Рисунок 4.4 - Датчик Скорости MD-256 Он передает сигнал на...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
Влияние параметров настройки на процесс регулирования - Устранение неисправностей автоматизированных систем управления судового двигателя