Расчет динамических параметров исходной системы - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев:

(2.10)
Подставляем в выражение полученные ранее ПФ звеньев САР, получаем:

(2.11)
Математическую модель для проверки ее правильности реализуем в среде моделирования MATLAB. Данный программный пакет позволяет простыми и наглядными средствами приложения Simulink реализовать компьютерную модель, с возможностью совершать с ней вычислительные эксперименты.
Создание блок-схем в SIMULINK основано на технологии визуально-ориентированного программирования. В качестве компонент для построения модели динамической системы используются так называемые модули (блоки) из достаточно представительной библиотеки SIMULINK. Удобный графический интерфейс позволяет осуществить сборку схемы моделирования в интерактивном (диалоговом) режиме путем перетаскивания с помощью мыши требуемых компонент и вычерчиванием соответствующих между ними линий связи. В результате получается структура исследуемой схемы, которую обычно называют SIMULINK-моделью (S-моделью).
В процессе ввода выбранных блоков, организации соединений и задания параметров компонентов система SIMULINK автоматически программирует S-модель в виде конечно-разностных уравнений и затем при пуске процесса моделирования решает их с помощью средств MATLAB [5].
При моделировании исследуется влияние параметров системы на характер изменения временных характеристик. Схема, составленная с использованием полученных ПФ и вышеуказанных основ работы с SIMULINK, приведена на рисунке 2.2. На вход подадим напряжение 10 В, а на выходе будем наблюдать полученный результат - график переходного процесса показан на рисунке 2.3.
Задающее напряжение равно 10В.
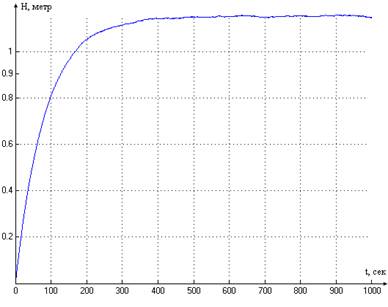
Рисунок 2.3 - График переходного процесса исходной системы
Из графика видно, что высота блока ППУ в результате переходного процесса превышает установленные нормами производства 0,9 метра. Время симуляции составляет 1000 секунд. Рассчитаем время переходного процесса. Поскольку временем переходного процесса принято считать время от начала переходного процесса до момента, когда кривая переходного процесса входит в 3 - 5% зону от установившегося значения и больше не выходит из нее, то время переходного процесса составит 450 сек. Для уменьшения времени и стабилизации процесса включим в систему регулятор.
Похожие статьи
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
SIMATIC S7-300 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Данный...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Для составления математической модели объекта проведем анализ всех составных элементов структурной схемы и рассчитаем параметры их передаточных функций....
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
Датчик Скорости MD-256 изображенный на рисунке 4.4 предназначен для работы с конвейерами. Рисунок 4.4 - Датчик Скорости MD-256 Он передает сигнал на...
-
Для реализации системы требуется следующее оборудование: частотный преобразователь, промышленный контроллер, ультразвуковой датчик уровня, датчик...
-
Системы автоматизированного проектирования (САПР) в настоящее время являются во многих случаях единственно возможными методами при конструировании новых...
-
При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления. Под структурой управления понимается...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Производительность поролона автоматизированной системы управления составляет 400 м3/час. Количество рабочих часов в году равно 2000 ч. В системе...
-
Годовые амортизационные отчисления рассчитываются по формуле: Aатк = аатк(1+kтм2)Сктс, (6.9) Где, аатк - коэффициент амортизационных отчислений; Kтм2 =...
-
Пожары на конвейерных линиях представляют большую опасность для работающих и могут причинить огромный материальный ущерб. К основным причинам пожаров,...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Расчет нелинейных систем автоматического управления
1. Задание для расчета нелинейной САУ Фазовый плоскость траектория автоколебание 1. Исследовать динамические режимы системы методом фазовой плоскости для...
-
Структура системы управления организацией Структура системы управления организацией - упорядоченная совокупность взаимосвязанных элементов, находящихся...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
- годовые затраты на ремонтные работы КТС, равны 15% от годовых амортизационных отчислений: СР=0,15 ААТК=0,1535233=5284,95 руб. (6.11) Расчет годовых...
-
Анализ условий труда Анализ условий труда на участке производства поролона, приводит к заключению о потенциальной опасности данного участка. Суть...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
На структурной схеме системы электропривода регулятор скорости с передаточной функцией (2.6) выглядит следующим образом (рисунок 2.3): Uз U UAR - UR...
-
Общие рекомендации по повышению прогнозируемой надежности блока согласования каналов сводятся к следующему: - Для выявления ранних отказов необходимо...
-
Сущность процесса проектирования - Методология создания сложных технологических систем
Сущность процесса Проектирования заключается в разработке конструкций и технологических процессов производства новых изделий, которые должны с...
-
Исходные допущения и предпосылки Блок согласования каналов (БСКЛ) предназначен для работы на усилительных пунктах и объединения выходов нескольких...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
Схема размещения технологического оборудования - это расположение технологического оборудования и рабочих мест на производственной площади. В курсовом...
-
Рассчитаем необходимое число единиц гипсоварочных котлов, согласно формуле: N=Pп/(Pч-K), Где Pп - требуемая часовая производительность предприятия; Pч -...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
Расчет динамических параметров исходной системы - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров