Построение экспериментальной переходной функции объекта управления, Определение передаточной функции объекта управления - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Определение передаточной функции объекта управления
Проведение эксперимента начинают с установки на объекте выбранного режима работы, который характеризуется постоянством выходной переменной и всех влияющих на нее переменных. Установившийся режим работы при заранее выбранном значении выходной переменной ХВых.0 выдерживают 2,0-- 2,5 мин для медленно протекающих процессов, связанных, например, с изменением температуры или влажности, и 0,3--0,5 мин -- для более быстро протекающих процессов, таких, например, как изменение давления или расхода.
Затем как можно быстрее вводят испытательное воздействие и одновременно начинают регистрировать изменение выходной переменной во времени. Для дальнейшей оценки вида испытательного воздействия необходимо также определить время его внесения. Помимо регистрации выходной переменной в процессе эксперимента желательно, если это, возможно, записывать изменения основных возмущающих переменных и, в первую очередь, нагрузки объекта.
Окончание переходного процесса определяется по значению выходной переменной. При экспериментальном определении переходной функции на объектах с самовыравниванием (р > 0) опыт считается законченным, если выходная переменная, начиная с некоторого момента времени, остается практически неизменной, а на объектах без самовыравнивания (р = 0) - если скорость изменения переменной достигает своего постоянного максимального значения. При снятии импульсных характеристик эксперимент прекращают, когда выходная переменная достигнет своего первоначального значения на объектах с самовыравниванием или перестанет изменяться на объектах без самовыравнивания.
Экспериментальная характеристика рассматриваемого объекта управления, т. е. температуры в помещении представлена в таблице 1.
Таблица 1 - Экспериментальные данные
|
Время, с |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
Входное ступенчатое воздействие, скорость оборотов двигателя, м/с |
1,5 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
1,9 |
|
Изменение выходной величины,0С |
0.5 |
0.5 |
0.8 |
0.9 |
1.1 |
1.3 |
1.35 |
1.38 |
1.5 |
1.59 |
1.65 |
1.7 |
1.7 |
1.7 |
Построим графики переходного процесса. Для этого на вход подается ступенчатое воздействие х(t) - скорость оборотов двигателя.
На рисунке 2.1 представлен график скачкообразного воздействия на объект управления. Для построения графика использована программа MathCad.
Рисунок 2.1- График скачкообразного изменения входного воздействия
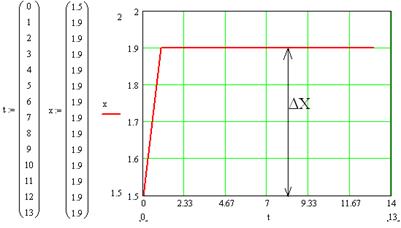
Где х - изменение входной величины, м;
T - время, с.
По данным таблицы 1 строится экспериментальная переходная функция объекта управления у(t) в программе MathCad.
Рисунок 2.2 - Получение переходной функции объекта управления у(t).
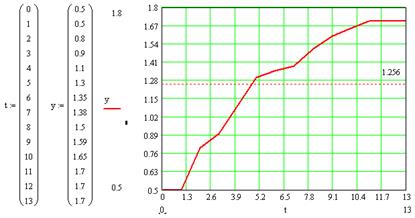
Где у - изменение выходной величины, м;
T - время, с.
Похожие статьи
-
Для построения в MathCad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточну функцию замкнутой...
-
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед...
-
Различают 4 группы критериев качества регулирования: - Критерии точности - используют величину ошибки в различных типовых режимах; - Критерии величины...
-
Синтез замкнутой САР - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Структурная схема одноконтурной САР приведена на рисунке 5.1. Основными элементами ее являются: АР - автоматический регулятор, УМ - усилитель мощности,...
-
Описание объекта управления - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Задачи управления технологическим процессом: минимизация (максимизация) некоторого критерия (себестоимость, затраты энергии и т. д.) при выполнении...
-
Для анализа качества переходных процессов в системах автоматического регулирования с ПИ - и ПИД - регуляторами представим показатели этих процессов в...
-
Для определения устойчивости замкнутой системы с ПИ-регулятором согласного критерию Найквиста записывают передаточную функцию разомкнутой системы...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Устойчивость САР связана с характером ее поведения после прекращения внешнего воздействия. С целью упрощения анализа устойчивости систем разработано ряд...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Определим основные показатели качества регулирования оптимизированной системы по переходной характеристике по задающему воздействию, имеющей...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Система автоматического управления это - комплекс устройств, предназначенных для автоматического изменения одного или нескольких параметров объекта...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
- Первая промежуточная ступень: Rя. пр1=3,83 Ом; с; Н-м; МКон. фикт = МС1 = 68,93 Н-м. При расчете переходного процесса М=f(t) для первой промежуточной...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Планирование технической подготовки производства анализатора спектра сигнала с построением календарного графика выполнения работ Техническая подготовка...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Переходную характеристику по задающему воздействию строят на основании ее передаточной функции Данная характеристика представлена на рисунке 1.12...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Рисунок 5 Схема всасывающего трубопровода Рассмотрим всасывающий трубопровод, запишем уравнения Бернулли для сечений 1-1 и 2-2. = - 3 + - 0,415 - = 3,79...
-
Время регулирования Переходная характеристика по задающему воздействию (рис. 1.12): . (1.71) Переходная характеристика по возмущающему воздействию (рис....
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Расчет нелинейных систем автоматического управления
1. Задание для расчета нелинейной САУ Фазовый плоскость траектория автоколебание 1. Исследовать динамические режимы системы методом фазовой плоскости для...
-
Выбор типа регулятора - Автоматические регуляторы
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное...
-
Защита и увеличение объема передаваемой информации с помощью известного гармонического анализа сигнала [3] основана на приближенном разложении...
-
Исследование временных характеристик Для того, чтобы исследовать динамические свойства системы, рассмотрим временные и частотные характеристики системы....
-
Механические и другие параметры блоков питания TFX12V - Импульсные источники питания
Габаритные размеры блока питания должны составлять 175х80х75 мм. Конфигурация корпуса и расположение крепежных элементов позволяют размещать его внутри...
Построение экспериментальной переходной функции объекта управления, Определение передаточной функции объекта управления - Синтез АСР уровня моющего вещества в емкости для промывки изделий