Уравнение движения изодромной обратной связи - Устранение неисправностей автоматизированных систем управления судового двигателя
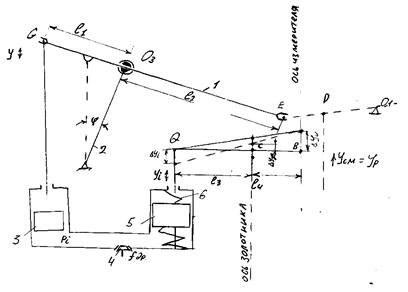
Рис. 5 Изодромная обратная связь
Как видно из схемы, представленной на рис. 9, связь состоит из двух последовательно соединенных звеньев: механического (рычажного) и гидравлического. Связь охватывает только усилитель и является кинематической.
Движение изодромной обратной связи опием уравнением движения ее математической линейной модели.
Связь между входной координатой Хi и промежуточной У будет определяться геометрическими соотношениями и описываться статической зависимостью в приращениях

,
Где кш - коэффициент пропорциональности, зависящий от потенциала точки опоры О3.
При переходе к относительным координатам получим

,
Где кш - коэффициент усиления НОС - безразмерная величина, равная
.
Уравнение движения гидравлического звена может быть получено на основании условия баланса сил, действующих на приемный поршень, с учетом процесса перетекания жидкости через игольчатый клапан 4. В общем случае на приемный поршень действуют:
- сила давления рабочей жидкости

;
- сила сжатия пружин
;
- сила инерции приведенных масс поршня и присоединенных к нему масс жидкости и рычагов
;
- - Ri; FТР - силы, которыми пренебрегаем с целью упрощения; - FТР. Ж - сила жидкостного трения
.
Переходя к приращениям и учитывая, что площадь приемного поршня fП и жесткость пружин с - постоянные величины, получаем:
.
ДРi определяется условием перетекания через дроссельный клапан.

,
Где fдр - площадь проходного сечения клапана; wдр - скорость истечения жидкости.
Полагая процесс истечения ламинарным, при котором w пропорциональна ДРi, для объемного расхода через клапан получим
,
где - коэффициент расхода

.
После подстановки ДРi получим

.
При переходе к безразмерной форме записи введем относительные координаты

;

И учтем уравнение движения механического звена

,
Получим

.
Разделив все члены этого уравнения на номинальную величину силы, действующей на приемный поршень, равную, получим

,
Где


- инерционное время изодромной связи
Ti - время изодромной связи:
;
J - безразмерный коэффициент, имеющий постоянное значение и равный отношению рабочих объемов дающего и приемного поршней:

;
КШ - коэффициент усиления НОС (настраиваемая величина, зависящая от соотношения плеч рычага обратной связи - положения точки опоры О3).
Если пренебречь влиянием сил инерции, то уравнение примет вид:
.

Похожие статьи
-
Изменение выходной координаты усилителя УУ. С определяется движением поршня сервомотора. Движение поршня зависит от двух факторов: от действующих на...
-
Рис. 1. Кинематическая схема всережимного регулятора двигателей Д-100. Регулятор двигателей Д100. Регулятор числа оборотов двигателей Д100 получил...
-
Уравнение динамики измерителя, представляющее аналитическую зависимость изменения во времени его выходной, можно получить на основе принципа Даламбера,...
-
Для определения коэффициента надо знать значение частной производной. Эти значения можно получить путем графического дифференцирования характеристик...
-
Исходные данные Номинальная мощность двигателя 20500, Номинальная скорость вращения вала двигателя 2.03 , Приведенный момент вращающихся масс 238,...
-
Для определения возможных установившихся режимов работы главной энергетической установки выполним графическое совмещение характеристик двигателя с...
-
Для нахождения значений коэффициента определим вначале величины частной производной. С этой целью перестроим винтовые характеристики (рис. 2) в...
-
Для построения винтовых характеристик воспользуемся формулой: (1) Где - мощность, срабатываемая винтом; - скорость вращения винта; - постоянный...
-
Для построения внешней и частичных характеристик двигателя воспользуемся рекомендуемой формулой: Где - номинальная частота вращения вала; - текущее...
-
В практической деятельности судовой механик осваивает состав, принцип действия, правила эксплуатации и технического обслуживания, методы статической и...
-
Уравнение тягового баланса При движении автомобиля тяговая сила Р Т На ведущих колесах (рис. 2.1.) затрачивается на преодоление сил сопротивления...
-
Векторная схема и вывод векторного уравнения задачи прицеливания Векторная схема задачи прицеливания при стрельбе из авиационного артиллерийского оружия...
-
Используя полученные геометрические параметры приводов манипулятора, измеряются линейные величины между смежными связанными системами координат и...
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Для составления математической модели объекта проведем анализ всех составных элементов структурной схемы и рассчитаем параметры их передаточных функций....
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Себестоимость продукции - это выражение в денежной форме затраты предприятия на производство и реализацию продукции. Себестоимость показывает, во что...
-
В инженерной практике принято промышленные холодильные камеры описывать линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами....
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
Датчик Скорости MD-256 изображенный на рисунке 4.4 предназначен для работы с конвейерами. Рисунок 4.4 - Датчик Скорости MD-256 Он передает сигнал на...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Холодильная автоматизированная установка состоит из трех компрессоров (КМ), оснащенных устройствами автоматической защиты, маслоотделителя (МО), сборника...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
Защита и увеличение объема передаваемой информации в многоканальной системе связи с использованием дискретных анализаторов частотного спектра сигнала...
-
При защите и увеличении объема передаваемой информации с использованием известных методов неполного (сокращенного) гармонического анализа обеспечение...
-
Расчет освещения сводится к определению размеров окон и их количества, а также к определению количества и типа лампы искусственного освещения. Задачей...
-
В задании на курсовой проект задана технологическая операция - захват. Захват выполняется с помощью схватывающих рабочих органов, которая прикрепляется к...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
- годовые затраты на ремонтные работы КТС, равны 15% от годовых амортизационных отчислений: СР=0,15 ААТК=0,1535233=5284,95 руб. (6.11) Расчет годовых...
-
Производительность поролона автоматизированной системы управления составляет 400 м3/час. Количество рабочих часов в году равно 2000 ч. В системе...
-
Анализ условий труда Анализ условий труда на участке производства поролона, приводит к заключению о потенциальной опасности данного участка. Суть...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Настройка контроллера и управление контроллером осуществляются через персональный или карманный компьютер при помощи программы "AK2-Service Tool"....
-
Средства контроля АК-2 - Модули. Базовый модуль - предназначен для управления центральной холодильной машиной Модули расширения. В сложных системах могут...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Введение - Разработка автоматизированной системы управления промышленной холодильной установкой
Современный уровень производства пищевых продуктов характеризуется с одной стороны увеличением урожайности полей за счет введения новых урожайных сортов...
Уравнение движения изодромной обратной связи - Устранение неисправностей автоматизированных систем управления судового двигателя