Уравнение динамики измерителя - Устранение неисправностей автоматизированных систем управления судового двигателя
Уравнение динамики измерителя, представляющее аналитическую зависимость изменения во времени его выходной, можно получить на основе принципа Даламбера, рассматривая все действующие силы, включая силы инерции.
При движении на измеритель действуют следующие силы, приведенные к его муфте и показанные на рис.7 поддерживающая сила А, представляющая собой сумму приведенных к муфте центробежных сил грузов F, а в общем случае и других деталей, центробежные силы которых могут оказывать действие на муфту;
Восстанавливающая сила Е, равная силе натяжения пружины задания;
Сила веса G движущихся частей, приведенная к муфте;
Сила сухого трения F, действующая во всех деталях, связанных в движение с муфтой, и приведенная к муфте;
- - сила скоростного (или жидкостного) трения Fтр. ж; - приведенная сила реакции струи и сил внешнего сопротивления в управляющем золотнике RЗОЛ, если последний связан с муфтой; - сила инерции Fi всех движущихся масс, связанных с муфтой.
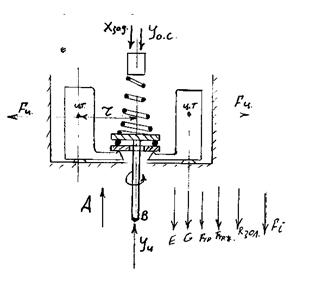
Рис. 3. К выводу уравнения динамики измерителя скорости
В соответствии с принципом д'Аламбера, обозначая приведенную массу всех движущихся деталей через mпр, можем записать
.
С целью упрощения будем пренебрегать силами веса G, сухого трения Fтр, неуравновешенными силами, силами сопротивления и реакции струи в управляющем золотнике Rзол. При отмеченных допущениях, уравнение запишем так
.
Сила А определяется суммарной массой грузов mгр, радиусом вращения их центра тяжести r и угловой скоростью вращения wн
.
Учитывая, что r может быть выражен через Уu, запишем
.
Сила Е равная силе натяжения пружины, является функцией перемещения муфты Ju координаты задания Хзад, перемещения УО. С под действием ЖОС и жесткости пружины с:

.
Учитывая, что с = const для цилиндрических пружин; для конических она представляет линейную функцию суммарной величины сжатия

;
.
Поэтому для общего случая:
Сила
,
Где D - коэффициент пропорциональности, определяемый экспериментальным путем.

.
Разложим функции А и Е в ряд Тейлора
,
.
Тогда уравнение движения измерителя запишется так:

Обозначим


; ; ; .
Получим с учетом разделения всех членов на Еном = Аном, окончательно можно записать

,
Где
; ;
;
;
.
Если предположить, что задание не изменяется, а жесткая обратная связь не влияет на натяжение пружины, то уравнение динамики измерителя принимает вид:
.

Похожие статьи
-
Для нахождения значений коэффициента определим вначале величины частной производной. С этой целью перестроим винтовые характеристики (рис. 2) в...
-
Рис. 1. Кинематическая схема всережимного регулятора двигателей Д-100. Регулятор двигателей Д100. Регулятор числа оборотов двигателей Д100 получил...
-
Исходные данные Номинальная мощность двигателя 20500, Номинальная скорость вращения вала двигателя 2.03 , Приведенный момент вращающихся масс 238,...
-
Для построения винтовых характеристик воспользуемся формулой: (1) Где - мощность, срабатываемая винтом; - скорость вращения винта; - постоянный...
-
Для построения внешней и частичных характеристик двигателя воспользуемся рекомендуемой формулой: Где - номинальная частота вращения вала; - текущее...
-
Для определения коэффициента надо знать значение частной производной. Эти значения можно получить путем графического дифференцирования характеристик...
-
Для определения возможных установившихся режимов работы главной энергетической установки выполним графическое совмещение характеристик двигателя с...
-
В практической деятельности судовой механик осваивает состав, принцип действия, правила эксплуатации и технического обслуживания, методы статической и...
-
Классификация автоматизированных систем (АС) Условно модель любой целесообразной деятельности можно представить как систему, состоящую из объекта...
-
Пожары на конвейерных линиях представляют большую опасность для работающих и могут причинить огромный материальный ущерб. К основным причинам пожаров,...
-
Датчик Скорости MD-256 изображенный на рисунке 4.4 предназначен для работы с конвейерами. Рисунок 4.4 - Датчик Скорости MD-256 Он передает сигнал на...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
В инженерной практике принято промышленные холодильные камеры описывать линейным дифференциальным уравнением 1-го порядка с постоянными коэффициентами....
-
Настройка контроллера и управление контроллером осуществляются через персональный или карманный компьютер при помощи программы "AK2-Service Tool"....
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Введение - Разработка автоматизированной системы управления промышленной холодильной установкой
Современный уровень производства пищевых продуктов характеризуется с одной стороны увеличением урожайности полей за счет введения новых урожайных сортов...
-
Средства контроля АК-2 - Модули. Базовый модуль - предназначен для управления центральной холодильной машиной Модули расширения. В сложных системах могут...
-
Себестоимость - это денежное выражение используемых в процессе производства продукции сырья, материалов, топлива, энергии, трудовых ресурсов, основных...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Расчет нелинейных систем автоматического управления
1. Задание для расчета нелинейной САУ Фазовый плоскость траектория автоколебание 1. Исследовать динамические режимы системы методом фазовой плоскости для...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
SIMATIC S7-300 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Данный...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Холодильная автоматизированная установка состоит из трех компрессоров (КМ), оснащенных устройствами автоматической защиты, маслоотделителя (МО), сборника...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Система наддува двигателей серии S50-98MC состоит из газотурбонагнетателя, воздухоохладителя, продувочного ресивера и выхлопного коллектора. Для...
-
Управление качеством продукции - Системы качества по международным стандартам ИСО серии 9000
В 70-80-х годах ученые и специалисты многих стран пришли к выводу, что качество не может быть гарантировано только путем контроля готовой продукции. Оно...
-
Себестоимость продукции - это выражение в денежной форме затраты предприятия на производство и реализацию продукции. Себестоимость показывает, во что...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Используя полученные геометрические параметры приводов манипулятора, измеряются линейные величины между смежными связанными системами координат и...
-
Векторная схема и вывод векторного уравнения задачи прицеливания Векторная схема задачи прицеливания при стрельбе из авиационного артиллерийского оружия...
Уравнение динамики измерителя - Устранение неисправностей автоматизированных систем управления судового двигателя