Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических параметров обрабатываемых изделий, номенклатуры и годовой программы их выпуска; состава и организации технологической подсистемы (серийного или специально разработанного технологического оборудования, обеспечивающего обработку заготовок, их мойку, сушку, контроль); состава и организации подсистем транспортирования изделий, приспособлений и режущего инструмента; складской подсистемы, обеспечивающей прием, хранение, выдачу и учет заготовок, готовых изделий и режущего инструмента; вспомогательной подсистемы, выполняющей уборку отходов производства, энергетическое и материальное обеспечение, техническое обслуживание и ремонт.
Построение структуры управления ГПС, включающей в себя управляющий вычислительный комплекс и соответствующее программное обеспечение, представляет собой сложную многопараметрическую задачу. При ее решении учитываются следующие факторы: структура и функции технологического оборудования; степень автономного управления; гибкость структур обработки информации; рациональность и эффективность средств контроля функционирования всех объектов управления; эффективность алгоритмического и программного обеспечения; потребность в моделировании, отладке и испытаниях системы управления и др.
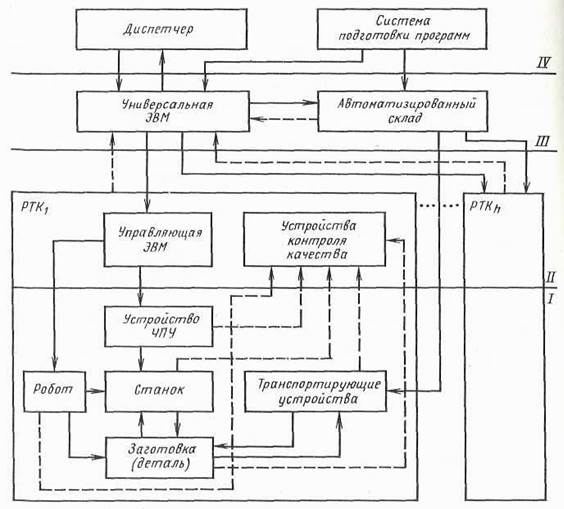
Рис. 22. Структурная схема управления ГПС, построенной на основе РТК
Структуру управления проектируемой ГПС целесообразно создавать по иерархическому принципу в виде набора относительно автономных систем управления с широко варьируемыми дополнениями и связями, способными к последующему наращиванию. При этом относительно автономные станочные модули должны самостоятельно принимать решения при выполнении заданных функций; при наличии многоуровневой организации управления каждый уровень управляет низшим и подчиняется высшему; автономное функционирование каждого уровня продолжается до тех пор, пока его действия не станут противоречить собственной УП или командам высших уровней.
На рис. 22 показана структурная схема системы управления ГПС, включающей в себя в качестве технологической подсистемы N-е число РТК и имеющей четырехуровневую структуру управления.
Самый верхний IV уровень -- диспетчер системы, который задает обобщенную программу выпуска и контролирует работу каждого РТК, входящего в ГПС. На этом уровне готовится алгоритмическое и программное обеспечение, а также планируются технологический процесс обработки и управление.
На III уровне универсальная ЭВМ с большой памятью и высоким быстродействием управляет автоматизированным складом и транспортными потоками ГПС, формирует состав программ для управления низшим уровнем, обеспечивая ритмичность производства при смене номенклатуры обрабатываемых заготовок.
Информационно-управляющая часть на II уровне включает в себя управляющую ЭВМ, в памяти которой содержится набор программ управления РТК, устройства технического диагностирования и контроля качества обрабатываемых заготовок и др.
В низший I уровень системы управления ГПС входят УЧПУ отдельными станками РТК. По каналам связи с управляющей ЭВМ II уровня устройства ЧПУ выбирают и корректируют управляющие программы для обработки конкретных заготовок.
Таким образом, при иерархической организации системы управления ГПС имеет место как бы восходящий информационный поток, параметры которого на каждом вышестоящем уровне обобщаются, или нисходящий информационный поток, параметры которого на каждом нижележащем уровне детализируются.
Взаимодействие информационных потоков в системе управления ГПС, а также набор и значение параметров определяются на этапе разработки программного обеспечения.
Программное обеспечение системы управления ГПС состоит из двух частей: стандартного или базового программного обеспечения, поставляемого вместе с выбранной управляющей вычислительной техникой, а также прикладного, разрабатываемого для обеспечения функционирования конкретно проектируемой ГПС.
Алгоритм функционирования ГПС, реализованный в виде программ, введенных в запоминающее устройство ее системы управления, в общем виде должен обеспечить максимальную загрузку технологического оборудования при изготовлении изделий запланированной номенклатуры с учетом различных непредсказуемых ситуаций: выхода из строя станка, поломки инструмента, отсутствия в данный момент нужных заготовок и т. п. Для осуществления такого заранее неопределенного цикла работы ГПС ее система управления должна иметь возможность хранить в своей памяти модель ГПС, отражающую текущее состояние ГПС, позволяющую как бы следить за прохождением заготовки от станка к станку и изменять соответствующим образом свой частный алгоритм работы по внешним сигналам от устройств, регистрирующих изменение ситуации на ГПС или в простейшем случае невыполнение каких-либо заданных операций.
Похожие статьи
-
Рассмотрим конкретные задачи, которые роботы решают в настоящее время на промышленных предприятиях. Их можно разделить на три основных категории :...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
В своем законченном идеальном виде ГПС являются высшей, наиболее развитой формой автоматизации производственного процесса. Можно сформулировать основные...
-
Системы управления - Виды автоматизированных производств
Управление металлорежущими станком можно представить как воздействие на его механизмы и устройства для выполнения требуемого технологического процесса...
-
Данное предприятие занимается производством 454080, г. Челябинск, пр. Ленина, 76 "Учебная техника и технологии" Отдел "ГАП и станки ЧПУ" Мазеин Петр...
-
Системы автоматизированного проектирования (САПР) в настоящее время являются во многих случаях единственно возможными методами при конструировании новых...
-
Организация ГПС и ГА П. Процесс развития автоматизации на промышленных проводился в ряд этапов. На первом этапе проводилась автоматизация отдельных...
-
Настройка контроллера и управление контроллером осуществляются через персональный или карманный компьютер при помощи программы "AK2-Service Tool"....
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
Системный подход позволяет найти оптимальное, в широком смысле, решение задачи Проектирования за счет всестороннего, целостного рассмотрения, как...
-
Особенности управления персоналом Под структурой управления понимается упорядоченная совокупность устойчиво взаимосвязанных элементов, обеспечивающих...
-
Рассматриваемая ЭМС и ЭМС-аналог содержат асинхронный и шаговый (ШД) электродвигатели соответственно. Каждый из типов электродвигателей имеет свои...
-
Классификация автоматизированных систем (АС) Условно модель любой целесообразной деятельности можно представить как систему, состоящую из объекта...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Введение - Гибкие автоматизированные производства и системы (на примере НПИ "Уралучтех")
Изучение учебного материала проводил в соответствии с достижениями науки и техники. В настоящее время в зависимости от уровня организационной структуры...
-
Холодильная автоматизированная установка состоит из трех компрессоров (КМ), оснащенных устройствами автоматической защиты, маслоотделителя (МО), сборника...
-
Структура системы управления организацией Структура системы управления организацией - упорядоченная совокупность взаимосвязанных элементов, находящихся...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
В последнее время наметился спрос на малые космические аппараты (МКА), которые могут выполнять различные задачи, как военного, так и мирного назначения....
-
Системный анализ многоуровневых иерархических структур Современный этап развития автоматизации производства характеризуется внедрением сложных систем...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
При подборе оборудования учитывают показатели основных его свойств: потребительских, отражающих полезный эффект от использования...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Пожары на конвейерных линиях представляют большую опасность для работающих и могут причинить огромный материальный ущерб. К основным причинам пожаров,...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
SIMATIC S7-300 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Данный...
-
Заключение - Гибкие автоматизированные производства и системы (на примере НПИ "Уралучтех")
В своей курсовой работе я старался максимально изучить и развить тему гибких автоматизированных систем производства на примере НПИ "Уралучтех")...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
В инновационной рыночной экономике все потребности людей имеют рыночную стоимость, а значит, могут быть выражены в денежном эквиваленте. Поэтому с...
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
Конструируя ЭМС, стремятся достигнуть идеала. Идеальная электрическая машина должна иметь определенные свойства (высокий КПД, надежность, малые размеры и...
-
Виды автоматизированных производств. - Виды автоматизированных производств
Рабочая машина - Это сочетание механизмов или устройств, выполняющих определенные целесообразные действия для производства полезной работы. С помощью...
-
Устройства для загрузки на станке - Виды автоматизированных производств
При обработке на станках-автоматах штучных заготовок их загрузку и выгрузку выполняют с помощью бункерных или магазинных механизмов питания,...
-
Устройства для автоматической смены инструмента - Виды автоматизированных производств
Особенность многоцелевых станков с ЧПУ -- наличие устройств автоматической смены инструментов, основное назначение которых -- сокращение времени простоя...
Особенности проектирования систем управления ГПС - Виды автоматизированных производств