Расчет нелинейных систем автоматического управления
1. Задание для расчета нелинейной САУ
Фазовый плоскость траектория автоколебание
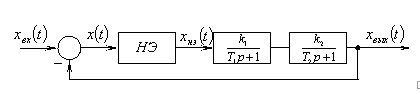
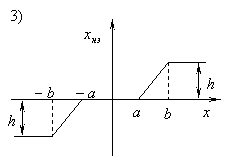
- 1. Исследовать динамические режимы системы методом фазовой плоскости для заданной статической характеристики нелинейного элемента (НЭ). 2. Построить переходный процесс по полученной фазовой траектории. 3. Определить наличие автоколебаний в системе, оценить их устойчивость и рассчитать параметры.
|
Вариант задания |
Варианты структуры и нелинейного элемента |
H |
A |
B | |||||
|
17 |
3 |
8 |
2 |
2 |
4 |
- |
25 |
15 |
30 |
Решение:
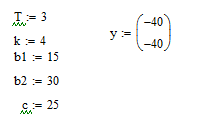
Для построения фазовой траектории воспользуемся пакетом Mathcad, зададим начальные данные из условия и получим графики фазовой траектории и переходного процесса:
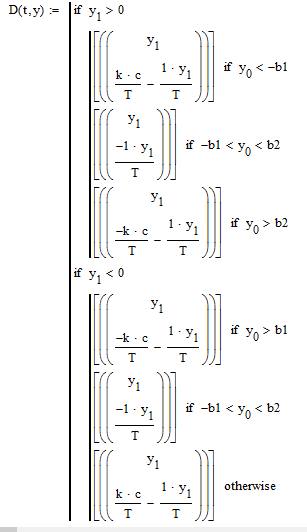
Строим траекторию на фазовой плоскости, предполагая, что первый столбец матрицы решения YI,0 содержит точки, в которых ищется решение дифференциального уравнения, второй YI,1 - содержит значения найденного решения, т. е. y(t) и, наконец, третий столбец YI,2 содержит производные этого решения. Получим графики фазовой траектории и переходного процесса системы с нелинейностью:
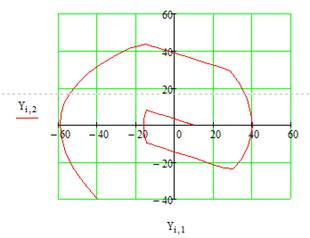
По графику переходного процесса делаем вывод, что автоколебания в системе отсутствуют.
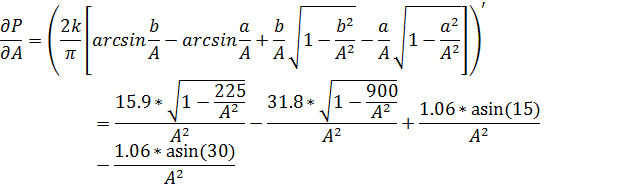
Коэффициент гармонической линеаризации для нашего случая:

При А?b2
На основании структурной схемы запишем характеристическое уравнение замкнутой системы:

Откуда находим:


Из второго уравнения находим частоту колебаний:

Подставляя найденное значение частоты в первое уравнение, находим амплитуду автоколебаний:


Теперь можем рассмотреть способ определения параметров автоколебаний в линеаризованной САУ с помощью критерия Михайлова. Для этого запишем характеристическое уравнение системы в виде:

Произведем замену:

Выделим мнимую и действительную часть:


Аналитическое условие устойчивости запишем в следующем виде



Подставляем численные значения, находим:
Исходя из условия устойчивости, делаем вывод, автоколебания отсутствуют т. к. ноль не может быть больше нуля. Метод гармонической линеаризации позволяет рассчитать возможные параметры автоколебаний, но такой вариант решения не говорит о наличии этих автоколебаний в системе.
Похожие статьи
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Введение - Анализ системы автоматического управления
Анализ линейных систем автоматического управления -- исследование влияния структуры, численных значений параметров и внешних воздействий на динамические...
-
Заключение, Список литературы - Анализ системы автоматического управления
Была проанализирована система дифференциальных уравнений. На основе анализа были составлены передаточные функции, на основании которых, была сформирована...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
Для обеспечения требуемых статических и динамических параметров определим требуемую структуру системы. Поскольку необходимо регулировать мощность...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Система автоматического управления это - комплекс устройств, предназначенных для автоматического изменения одного или нескольких параметров объекта...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Уравнения состояния и основные передаточные функции замкнутой системы В данной работе рассматривается АСР, управление в которой организованно по принципу...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
В таблице 1.1 приведены варианты начальных условий стрельбы. Таблица 1.1 Параметры Номер варианта Примечания 1 2 3 4 5 Н , км 10 15 20 25 30 V , км/час...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Рассмотрим ЛАЧХ и ЛФЧХ системы (рисунок 18): Рисунок 21 - ЛАЧХ и ЛФЧХ разомкнутой системы по каналу управления Исследуемая система устойчива, если ее...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Определим основные показатели качества регулирования оптимизированной системы по переходной характеристике по задающему воздействию, имеющей...
-
Передаточную функцию системы по задающему воздействию - главную передаточную функцию получаем следующим образом: Передаточная функция системы по...
-
ПРИНЦИПЫ ОПИСАНИЯ НАДЕЖНОСТИ АСУ ТП. ОТКАЗЫ АВТОМАТИЧЕСКИХ СИСТЕМ - Надежность систем автоматизации
Автоматизированную систему управления, как и любую сложную систему, целесообразно рассматривать как совокупность элементов с определенной взаимосвязью...
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
Классификация автоматизированных систем (АС) Условно модель любой целесообразной деятельности можно представить как систему, состоящую из объекта...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Система управления - Расчет коробки подач горизонтально-фрезерного станка
Для управления автоматической коробкой подач горизонтально-фрезерного станка применяются контактные электромагнитные муфты. Для питания электромагнитных...
-
Защита и сигнализация, Расчет надежности системы - Производство бумаги
В процессе работы сортирирующего гидроразбивателя в котором проиходит сортировка макулатурной массы. Так как по технологическим требованиям процесс...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
В ходе данной работы необходимо установить свойства системы автоматического управления, определить ее временные и частотные характеристики, а также...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
ОБЩИЕ СВЕДЕНИЯ О НАДЕЖНОСТИ АВТОМАТИЧЕСКИХ СИСТЕМ - Надежность систем автоматизации
Для оценки поведения автоматической системы в эксплуата-ционных условиях используется понятие надежности системы. При эксплуатации автоматическая система...
-
Себестоимость продукции - это выражение в денежной форме затраты предприятия на производство и реализацию продукции. Себестоимость показывает, во что...
-
1) Усилительное звено (безынерциальное). В усилительном звене выходная величина в каждый момент времени пропорциональна входной величине. Примерами...
-
Для построения в MathCad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточну функцию замкнутой...
-
Структура системы управления организацией Структура системы управления организацией - упорядоченная совокупность взаимосвязанных элементов, находящихся...
Расчет нелинейных систем автоматического управления