ПРОЕКТИРОВАНИЕМЕХАНИЗМА, Определение размеров кривошипа и шатунов, Построение кинематической схемы механизма - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
Определение размеров кривошипа и шатунов
Радиус кривошипа LOA =r определяется через ход поршня Н по формуле
R =H/2 (2)
Длины шатунов LAB = lAC =l определяются через радиус кривошипа и параметр л:

(3)
Из формул (2), (3) получим
R =90/2 =45мм=0,045м
LAB = lAC =l =45/0.28=161мм=0,161м
Построение кинематической схемы механизма
А. Кинематическая схема при заданном положении ведущего звена (ф1 =120°) (рис.5)
Выбираем масштаб длин МL

Пусть радиус кривошипа lOA =0,045м соответствует на чертеже отрезок ОА = 45 мм. Тогда масштаб построения будет равен
МL = = = 1000 мм/м

Вычисляем чертежные размеры.
Чертежные размеры шатунов равны
AB = AC = lAB *мL =0,161*1000 =161мм
Чертежные размеры отрезков, определяющих положения центров масс, равны
AS2 = AS4 =AB =0,28*161 =45мм
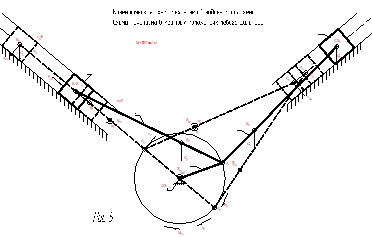
Рис.5 Построение кинематической схемы механизма для заданного положения кривошипа
Вычерчиваем механизм (рис. 5)
- - Проведем вертикальную линию DD? - ось симметрии механизма. - Из произвольной точки О, лежащей на этой линии, принимаемой за центр вращения кривошипа, проведем две прямые линии под углом
К вертикальной линии. Получим оси цилиндров ОВ и ОС.
- - От оси ОВ левого цилиндра отложим угол ф1 =120°. - На стороне этого угла отложим отрезок ОА = 30 мм, изображающий положение кривошипа при ф1=120°. - Из точки А радиусом АВ=АС=161 мм делаем засечки на осях цилиндров. Получим точки В и С, определяющие положения поршней при ф1. - Изобразим поршни в виде ползунов в произвольном масштабе. - Соединим точки В и C с точкой А, получим схему механизма в заданном положении при ф1 =120°. - Отложим от точки А отрезки AS2 = AS4 =45мм на линиях АВ и АС. Получим положения центров масс S2, S4.
Б. Кинематические схемы двух "мертвых" положений поршня В
Механизм находится в "мертвых" положениях, когда кривошип и шатун вытянуты в одну линию.
Вычертим в принятом масштабе кинематическую схему механизма для случаев, когда поршень В находится в верхней и нижней "мертвых" точках (рис.6).
- Проведем через точку О окружность радиусом ОА.

Рис.6 Построение кинематической схемы механизма при 2х "мертвых" положениях
- - Точки пересечения этой окружности с линией ОВ (точки A0 и A0 на рис.6) определяют положения кривошипа ОА в "мертвых" положениях точки В. - Из точек A0 и A0 делаем засечки радиусом АВ = 161 мм на продолжении линии ОВ. Получим верхнюю B0 и нижнюю B'0 "мертвые" точки поршня В. - Из точек A0 и A0 радиусом АВ = АС = 161 мм мы делаем засечки на продолжении прямой ОС. Будем иметь точки C0 и C'0. - Соединим точки B0, C0 сточкой A0, получим схему механизма в верхнем "мертвом" положении точки В. - Соединим точки B'0, C'0 сточкой A'0, получим схему механизма в нижнем "мертвом" положении точки В. - Отложим от точки A0 отрезки A0 S20 = A0 S40 =45мм, получим положения центров масс S20 и S40 при верхнем "мертвом" положении точки В. - Отложим от точки A'0 отрезки A'0 S'20 = A'0 S'40 =45мм, получим положения центров масс S20 и S40 при нижнем "мертвом" положении точки В.
Похожие статьи
-
ЦЕЛЬ. Найти скорости и ускорения центров масс и угловые скорости, и угловые ускорения звеньев механизма. Определение скоростей методом построения планов...
-
1. Механизм I класса - кривошип ОА связан со стойкой вращательной парой и равномерно вращается вокруг центра О (рис.1). - Угловое ускорения кривошипа,...
-
ЦЕЛЬ : определение усилий (реакций) в кинематических парах и уравновешивающей силы (уравновешивающего момента). Силовой расчет проводится...
-
ИСХОДНЫЕДАННЫЕ - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
1 Описание двигателя На схеме обозначено: 1 - кривошип, 2, 4 - шатуны, 3, 5 - поршни (ползуны), 6 - неподвижная часть механизма - стойка. Стрелкой...
-
0- стойка; 1- кривошип; 2- шатун; 3- ползун; 4- шатун; 5- коромысло. Таблица 1.- Кинематические пары. Обозначение пары. Подвижность пары. Звенья,...
-
Построение диаграмм движения толкателя. Исходные данные при проектировании : Угловая скорость кулачка: Масштабные коэффициенты: 1. Масштаб угла поворота...
-
Звенья Моменты инерции [кгм2 ] Звено 1 - невесомый тонкий стержень IS1 =0 Звено 2 - тонкий стержень IS2 =8*10-3 Звено 3 - поступательное движение IS3 =0...
-
Построение плана положений механизма Кинематический анализ механизма - это аналитический или графический процесс расчета, в результате которого...
-
Усилия во внутренних кинематических парах возникают согласно закону равенства действия и противодействия, т. е. попарно равные по модулю, направленные по...
-
Описание механизма МЕХАНИЗМ представляет собой 6-тизвенный рычажный механизм. КИНЕМАТИЧЕСКАЯ СХЕМА механизма показана на рис.1: Звено 1 - Ведущее -...
-
Кинематический анализ рычажного механизма - Исследование рычажного механизма долбежного станка
При кинематическом исследовании ставят две основные задачи: 1. Определение положений звеньев и траектории заданных точек; 2. Определение линейных и...
-
Выбираем масштаб построения эвольвентного зубчатого зацепления: Порядок построения зубчатого зацепление: 1. откладываем aW - межцентровое расстояние; 2....
-
Синтез кулачкового механизма - Исследование рычажного механизма долбежного станка
При курсовом проектировании кулачковый механизм является частью общей кинематической схемы проектируемой машины. Он используется либо как основной...
-
1 Изобразим кривошип в том же масштабе длин На рис. 14а. 2 Покажем силы, действующие на кривошип. При установившемся режиме работы на кривошип в нашем...
-
Для определения скоростей точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана скоростей механизма. План скоростей...
-
К звеньям ГНЗ прикладываем, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение равновесия сил...
-
Силовое исследование структурного элемента (звенья 4, 5) Задачей силового расчета механизма является определение реакций во всех кинематических парах и...
-
1. Откладываем от делительной окружности( с учетом знака) расчетное смещение x1M и проводится делительная прямая исходного производящего контура реечного...
-
Силовой расчет диады 4-5 - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
Силовой расчет диады 4-5 производится точно так же как диады 2-3. 1. Изобразим диаду 4-5 в прежнем масштабе длин мl = 1000 мм/м. 2. Покажем все силы,...
-
Тип кулачкового механизма Кулачковый механизм типа II называется коромысловым и состоит из кулачка и толкателя (коромысла), который касается кулачка во...
-
К звеньям диады прикладываем силы тяжести, реакции отброшенных связей, силы инерции звеньев и согласно принципу Даламбера записываем векторное уравнение...
-
Рядовая зубчатая цилиндрическая передача согласно кинематической схемы, приведенной в задании на проектирование соединяет выходной вал планетарного...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Исходные данные Кинематическая схема заданного механизма приведена на рис. 2, где механизм изображен в крайних и заданном положениях ( соответственно...
-
Исходные данные Кинематическая схема заданного механизма приведена на рис.3, где механизм изображен в крайних и заданном положениях. Геометрические...
-
Составление расчетной схемы и исходного уравнения для расчета зажимного усилия Силовой расчет станочных приспособлений можно разбить на следующие этапы:...
-
Для определения ускорений точек механизма воспользуемся графоаналитическим методом расчета с помощью построения плана ускорений механизма. План ускорений...
-
В результате проведенного исследования рычажного механизма глубинного насоса произведен структурный, кинематический и силовой анализ механизма. Мы...
-
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы: ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к...
-
1. Исходные данные: N1 = 280, n3 = 420, nH = 140. ; Колесо 3 остановлено. 2. Формула Виллиса: Где m - число внешних зацеплений z1 = 48; z2 = 24; z2' =...
-
Расчет параметров планетарного редуктора Планетарные редукторы обладают степенью подвижности W = 1 и имеют в своем составе зубчатые колеса (сателлиты) с...
-
В зависимости от направления шатун работает либо на растяжение, либо на сжатие. В зависимости от направления приложенных сил и шатун испытывает либо...
-
Выбираем произвольно полюс Р и откладываем от него параллельно перпендикуляру к звену ОА в сторону вращения кривошипа вектор, изображающий скорость в...
-
При обработке на металлорежущих станках очертания, форма деталей (производящие линии) образуется в результате согласованных между собой вращательных и...
-
1. Тележка (рис.4) имеет опорные ходовые колеса 1 и 2. Ходовое колесо 1 приводится в движение при помощи электродвигателя 3 через редуктор 4. На...
-
Исходные данные для расчета кулачкового механизма: Max = 29 град - максимально допустимый угол давления NК = 1150 об/мин - частота вращения кулачка...
-
Исходные данные. Кинематическая схема заданного механизма приведена на рис.2, где механизм изображен в крайних и заданном положениях (соответственно...
-
Исходные данные в H ОА - 21; AB - 27; CD - 13; DO1 - 18; B - 27; PП. с. - 4300. Определение сил инерции ; . ;; ;. Определение моментов инерции (H*m) ; ....
-
Проверка на самоторможение, Определение размеров гайки - Проектирование домкрата
Под самоторможением понимается обеспечение невозможности самопроизвольного движения винта под действием рабочей нагрузки. Для обеспечения самоторможения...
-
Курсовой проект по прикладной механике является самостоятельной работой студента, завершающей изучение этой дисциплины. В процессе разработки проекта...
ПРОЕКТИРОВАНИЕМЕХАНИЗМА, Определение размеров кривошипа и шатунов, Построение кинематической схемы механизма - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС