Получение дискретной математической модели объекта - Моделирование математической модели теплообменника
Z-преобразование является одним из математических методов, разработанных для анализа и проектирования дискретных систем. Аппарат Z-преобразования играет для цифровых систем ту же роль, что и преобразование Лапласа для непрерывных систем. В последние годы при исследовании дискретных систем большое значение стал иметь метод пространства состояний, благодаря его многосторонности и общему подходу к задачам анализа и проектирования. [1]

Мотивировку использования Z-преобразования для изучения дискретных систем можно пояснить на примере преобразования Лапласа для квантованного сигнала. Пусть выходной сигнал идеального квантователя обозначен через. Преобразование Лапласа для определяется:





Выражение для не является рациональной функцией относительно, поскольку оно содержит множитель, не свойственный большинству передаточных функций непрерывных систем. Когда в передаточной функции появляется множитель, могут возникнуть трудности в вычислении обратного преобразования Лапласа. Следовательно, желательно сначала преобразовать иррациональную функцию в рациональную, обозначаемую, посредством замены комплексной переменной на другую комплексную переменную Z. Выбор такой замены очевиден:

Хотя замена отвечает тем же требованиям. Решая уравнение (4.2) относительно, получим
В двух последних уравнениях Т период квантования; Z комплексная переменная, действительная и мнимая части которой определяются в виде:

Где


Связь между Р и Z в уравнении (4.2) может быть определена как Z-отображение. Подставляя (4.2) в выражение (4.1), получим



Что при представлении в компактной форме является рациональной функцией относительно. Следовательно, можно определить как преобразование функции, т. е.
= Z-преобразование

Где Z - оператор Z-преобразования. Следуя выражениям (4.1) и (4.7), можно записать:



Поскольку - преобразование получается из преобразования Лапласа для функции заменой, то, в общем, для любой функции, имеющей преобразование Лапласа, существует также - преобразование.
Для осуществления z-преобразования воспользуемся пакетом Matlab:
Clc, clear
W1=tf([49.198 0.4909],[692.55 109.48 1]) %Задаем передаточную функцию для заданного динамического канала
T=0.5; % задаем период квантования, от которого будет зависеть точность модели
WW=c2d(W1,T,'zoh'); %производим переход от непрерывной модели к дискретной с ранее заданным периодом квантования и выбранным экстраполятором 'zoh'figure(1)
Step(WW, W1) %построим в одной системе координат непрерывную модель и дискретную grid on %нанесение сетки на систему координат
Получаем графики переходных характеристик для непрерывной и дискретной систем с периодам квантования Т=0.5 (Рис. 4.1).
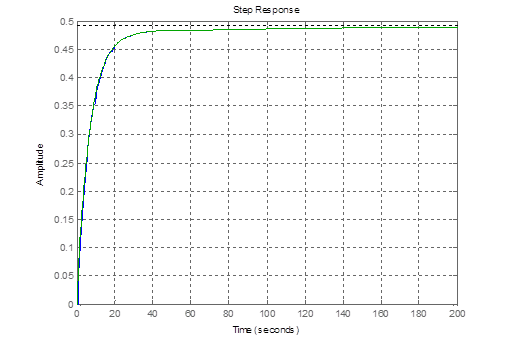
Рисунок 4.1 - Переходная характеристика непрерывной и дискретной систем с периодом квантования Т=0.5
Произведем увеличение части переходных характеристик, для определения погрешности, возникающей при переходе от непрерывной к дискретной модели:
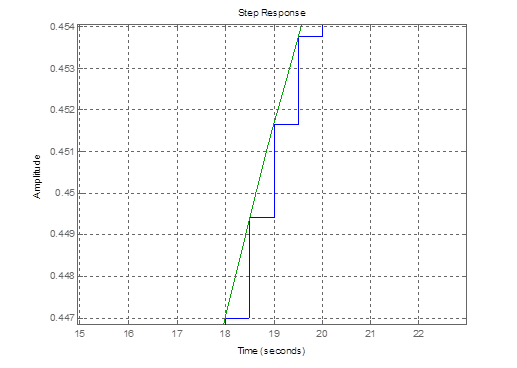
Рисунок 4.2 - Увеличенная часть переходной характеристики непрерывной и дискретной систем с периодом квантования Т=0.5
Определяем погрешность квантования:

Погрешность квантования не превышает заданную (5%), значит выполняем переход от непрерывной модели к дискретной с периодом квантования 0.5.
Передаточная функция в z-области для заданного динамического канала:
Похожие статьи
-
Выделим случай, когда входной сигнал X ( T ) является элементарной функцией 1( T ). Реакцию системы на воздействие 1( T ) можно компактно: [1] Где...
-
Уравнение динамики теплообменника: Передаточные функции объекта получим по его уравнению динамики. Для этого запишем уравнение по заданному каналу. Затем...
-
Заключение, Список использованной литературы - Моделирование математической модели теплообменника
В данной курсовой работе была получена математическая модель теплообменника в виде дифференциальных уравнений. Также была получена передаточная функция...
-
В основе метода площадей лежит предположение, что объект может быть описан линейным дифференциальным уравнением с постоянными коэффициентами, а его...
-
В воздушном зазоре электрических машин всегда, наряду с основной гармонической составляющей вращающегося магнитного поля, присутствуют гармонические...
-
Теоретическое обоснование математического моделирования - Математические методы и модели в экономике
Коммерческая деятельность в том или ином виде сводится к решению таких задач: как распорядиться имеющимися ресурсами для достижения наибольшей выгоды или...
-
Необходимо составить математическое описание теплообменника, в котором жидкий продукт нагревается насыщенным водяным паром (расход, кг/с), до температуры...
-
Введение - Моделирование математической модели теплообменника
Математический динамический модель канал Качественные и количественные изменения в промышленности, науке и технике составляют основу для значительного...
-
Любой электромеханический преобразователь можно рассматривать в установившемся и динамическом режиме. Модель в установившемся режиме, по сути, является...
-
В 1974г. группа аргентинских ученых во главе с профессором А. Эррерой получила предварительные результаты работы над латиноамериканской моделью...
-
Формальная классификация моделей Формальная классификация моделей основывается на классификации используемых математических средств. Часто строится в...
-
В большинстве случаев структурная неопределенность вызвана неполнотой знания аналитической структуры уравнений модели объекта управления. При не...
-
Подобно предыдущему обозначим. Тогда аналогичные рассуждения приводят к соотношению . (1.10) Проделывая те же преобразования, что и при выводе уравнения...
-
1. Универсальность - характеризует полноту отображения моделью изучаемых свойств реального объекта. 2. Адекватность - способность отражать нужные...
-
Классификация математических моделей - Математическое моделирование в менеджменте и маркетинге
Математические модели могут быть Детерменированными и Стохастическими . Детерменированные модели - это модели, в которых установлено взаимно-однозначное...
-
Методы математического моделирования экономики развиваются уже почти 200 лет. За это время созданы десятки тысяч моделей разной степени общности и...
-
Модели и моделирование - Экономико-математические методы
Одним из основных методов научного познания является эксперимент, а самой распространенной его разновидностью - метод моделирования систем. В процессе...
-
Структурная и приведенная формы модели. - Моделирование в эконометрике
Система совместных, одновременных уравнений (или структурная форма модели) обычно содержит эндогенные и экзогенные переменные. Эндогенные Переменные...
-
Выбор математической формы функции при моделировании зависимости выпуска продукции от производственных факторов Постановка проблемы. Одним из важнейших...
-
Уровень науки и техники Надежность средств, с помощью которых человек достигает космоса высокая, но не идеальна. РН -- сложная конструкция, и даже в...
-
Первая попытка формализовать описание экологических процессов была принята в 1971 г. американским исследователем Дж. Форрестером. В своей книге "Мировая...
-
Пусть есть математическое ожидание цены состояния объекта при условии, что в момент времени tдопустимое экологическое состояние не достигнуто и цена...
-
Понятие многосекторной экономики Многосекторная экономика-- экономическая система, в которой на рыночной основе сосуществуют частная, государственная и...
-
Модель Мальтуса Скорость роста пропорциональна текущему размеру популяции. Она описывается дифференциальным уравнением Где б -- некоторый параметр,...
-
Как и каждый достаточно ярко выраженный класс экономико-математических моделей, совокупность моделей календарного планирования обладает рядом...
-
Методы исследования математических моделей - Математическое моделирование в менеджменте и маркетинге
Все методы математического моделирования можно разделить на четыре класса: -аналитические (априорные); -имитационные (априорно-апостериорные) модели;...
-
Часто оказывается, что входные величины, приложенные к системе, имеют стохастический характер. В этом случае нельзя использовать детерминированные...
-
Основные понятия теории экономико-математического моделирования Кибернетический подход к исследованию экономико-математических систем Обычно...
-
Лаговые модели - Экономическое моделирование временных рядов
Для многих экономических процессов характерно, что эффект от воздействия некоторого фактора на показатель, характеризующий процесс, оказывается не сразу,...
-
Моделирование временной переменная автокорреляция Главным инструментом эконометрического исследования является модель. Выделяют три основных класса...
-
Классификация математических моделей - Построение и классификация математических моделей
К классификации математических моделей разные авторы подходят по-своему, положив в основу классификации различные принципы. Можно классифицировать...
-
Коэффициенты структурной модели могут быть оценены разными способами в зависимости от вида системы одновременных уравнений. Наибольшее распространение...
-
Известно, что проблема замены старого парка машин новыми, устаревших орудий -- современными -- одна из основных проблем индустрии. Оборудование со...
-
В решении любой прикладной задачи можно выделить три основных этапа: - Построение математической модели исследуемого объекта - Выбор способа и алгоритма...
-
Построение, или моделирование, конечной факторной системы для анализируемого экономического показателя хозяйственной деятельности можно осуществить как...
-
В качестве примера конкретной модели процесса управления обсудим модель распределения времени между овладением знаниями и развитием умений, впервые...
-
Построение модели с помощью метода деревьев решений - Моделирование вероятности банкротства
В отличие от логистической регрессии, при использовании метода деревьев решений ограничения для независимых переменных отсутствуют, поэтому для...
-
Нелинейные модели регрессии - Моделирование в эконометрике
Нелинейные модели регрессии и их линеаризация. 1. Типы нелинейных моделей: 2. Нелинейные модели линейные по объясняющим переменным и их линеаризация. 3....
-
Индекс Морана выявил наличие положительной пространственной зависимости в данных. То есть часть наблюдений кластеризуется на территории города по...
-
К моделированию теплообменника с псевдоожижаемой насадкой для систем аспирации стройиндустрии
К моделированию теплообменника с псевдоожижаемой насадкой для систем аспирации стройиндустрии Модернизация предприятий строительного комплекса на основе...
Получение дискретной математической модели объекта - Моделирование математической модели теплообменника