Второй способ: функционал с ограничением на компенсацию полюсов, реализация через переменные состояний - Проблемы конструирования устойчивой системы автоматического управления
Воспользуемся теперь для поиска решения функционалом (2.13).
Пространство операторов
В рассматриваем примере добавка (2.12) может быть представлена:

Заметим, что для упрощения решения можно заменить
В оценке на
.
Сходимость оценки


Обеспечит наличие мнимых полюсов объекта управления в числителе, т. е. в полиноме, что, учитывая (2.8), приведет к отсутствию подобных полюсов в числителе регулятора.
Приведем общий вид используемого критерия:

Тогда уравнение Винера-Хопфа примет вид:


Выпишем в явном виде:





Для того, чтобы проанализировать влияние на получающийся регулятор и свойства системы, было реализовано автоматизированное решение уравнения Винера-Хопфа с, записанными выше (Приложение А, Листинг 2). Предполагается, что, при должной настройке, эти функции можно будет использовать для анализа подобных задач и их решений - основная проблема конструирования подобного комплекса инструментов заключается в распределении нулевых полюсов и нулей при факторизации и сепарации.
Приведем решение, полученное при :

Найдем корни :



Наличие полюсов объекта управлении в разности сигнализирует о правильности решения - при вычислении соответствующие корни следует сократить.

Найдем теперь корни характеристического полинома сконструированной системы:


Можно утверждать, что система устойчива - все корни характеристического полинома лежат в левой полуплоскости. Степень же устойчивости равна.
Схема модели аналогична схеме на рис. 5.
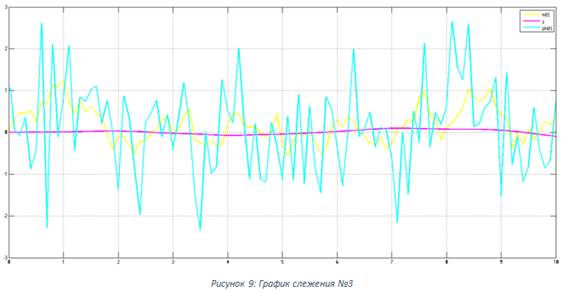
Приведем теперь графики, с помощью которых удобно анализировать влияние значения веса на сконструированную систему.
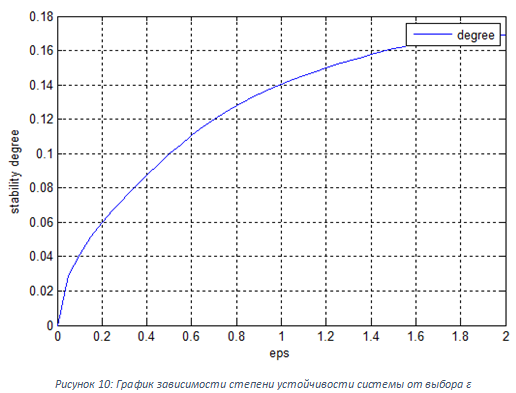
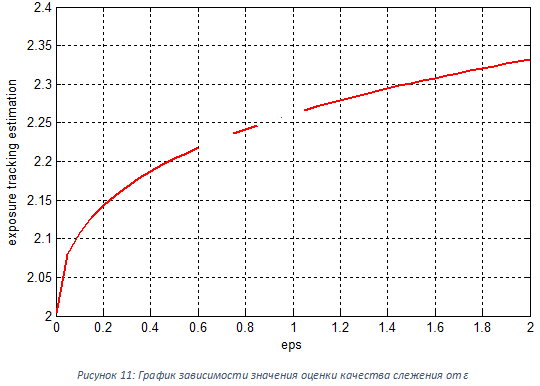
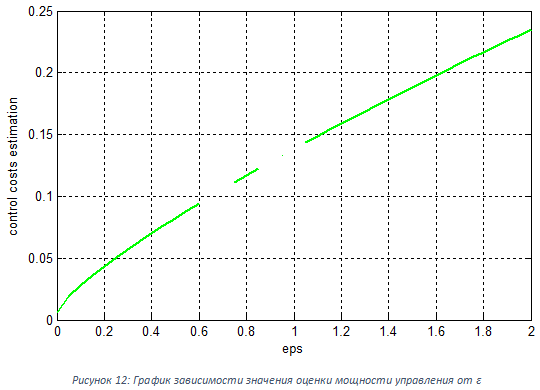

Графики были построены поточечно с шагом в. Разрывы графика появлялись там, где значения соответствующих оценок, т. е.

Для рис. 11 и

Для рис. 12 принимали значения. Проблема появления таких значений заслуживает отдельного исследования и лежит вне рамок данной работы. В качестве вероятных причин можно назвать неспособность Matlab посчитать эти интегралы аналитически, либо же наличие полюсов в пределах интегрирования, приводящих к расхождению интеграла. Тогда, возможно, имеет смысл найти главные значения соответствующих интегралов. Также стоит в указанных случаях вычислить индикатор совместимости исходных данных Винера-Хопфа.
Продолжим анализ построенных графиков. Как видно из рис. 10 мы можем улучшить степень устойчивости с помощью увеличения веса. Но подобный выигрыш требует своей цены - из рис. 11-12 видно, что с ростом веса ухудшаются желаемые качества системы, сформулированные в постановке.
Таким образом было установлено, что функционал вида (2.13) позволяет решить поставленную задачу в пространстве операторов, а также дает поле для маневрирования при нахождении регулятора - конструктор, используя графики на рис. 10-12, может, выбирая значение, получить систему с желаемыми оптимальными в силу каких-либо условий параметрами.
Пространство состояний
Для того, чтобы реализовать добавку (2.12) необходимо расширить фазовое пространство новыми переменными.
Для этого нам надо ввести такую переменную




Обратимся к рис. 4. Нам надо дополнить схему так, чтобы у нас появился такой выход, что передаточная функция для него относительно входа будет иметь вид:

(3.2)
Запишем выражение относительно сигнала и желаемого выхода :

Чтобы получить соотношение (3.2) следует пропустить сигнал через звено. Найдем его реализацию в пространстве состояний:

Из постановки

.
Тогда

Найдем теперь матрицу передаточных функций системы:

Отсюда следует, что в качестве надо выбрать.
Приведем теперь структурную схему расширенной системы:
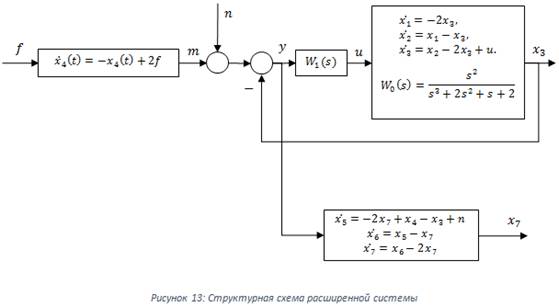
Новый критерий примет вид:

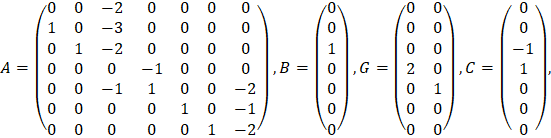
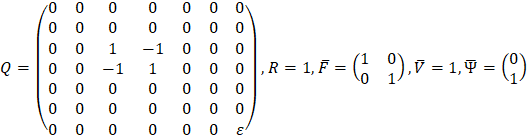
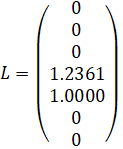
Запишем теперь все данные, необходимые для решения задачи с помощью функции build_regulator7dim (Приложение А Листинг 1):
Проведем анализ свойств системы:

Условия, указанные в теореме, не выполняются.
Доведем решение до конца:

Выпишем передаточную функцию:



Построенный таким образом регулятор сам оказался неустойчив - его характеристический полином (т. е. ) содержит корни, лежащие на мнимой оси: . Модель для данного случая не конструировалась в силу своей громоздкости.
Таким образом было установлено, что использование функционала (2.13), т. е. реализация добавки (2.12) через расширение фазового пространства, не позволило решить задачу в пространстве оригиналов.
Похожие статьи
-
Для ускорения процесса конструирования регулятора в пространстве состояний в Matlab была разработана функция, которая, при должной настройке, позволяет...
-
Воспользуемся теперь критерием (2.14). Пространство состояний Структурная схема системы с учетом введенного воздействия примет вид: Запишем...
-
При формулировании задачи в одном из пространств возникает необходимость перехода к тождественной постановки в другом. К сожалению, не всегда...
-
Рассмотрим произвольное звено коррекции: (1.5) Соотношение между и обусловлено требованием строгой реализуемости проектируемого звена как необходимого...
-
Конструирование функционала - Проблемы конструирования устойчивой системы автоматического управления
Основная часть алгоритма - не связанная с математическими сложностями вычисления решений уравнений Риккати и Винера-Хопфа - заключается в составлении...
-
Заключение - Проблемы конструирования устойчивой системы автоматического управления
Управление алгоритм фильтрация устойчивость В настоящей работе была проанализирована проблема оптимальной стабилизирующей фильтрации для класса объектов...
-
Обзор классического подхода Приведем теорему для формирования линейного закона управления с обратной связью в пространстве состояний [3]: Дан объект,...
-
В настоящей главе будет произведен разбор частного случая задачи оптимальной фильтрации. На примере будет разобран ход построения алгоритма, будут...
-
Приведем некоторые оценки, линейные комбинации которых используются в качестве обобщенного интегрального критерия при решении задач в пространстве...
-
На ней - квадратная матрица передаточных функций объекта управления с полюсами и нулями на мнимой оси. - матрица передаточных функций фильтра,...
-
Задача оптимальной фильтрации заключается в конструировании устройства, отфильтровывающий полезный сигнал от помехи. Приведем схему для множества...
-
Сформулируем задачу поиска оптимального регулятора в общих понятиях: дан многомерный реальный объект управления с квадратной матричной передаточной...
-
Устойчивость - Проблемы конструирования устойчивой системы автоматического управления
Перейдем от общих понятий к формализации данного свойства в интересующей нас сфере. В случае нестационарных систем существует множество различных...
-
Введение - Проблемы конструирования устойчивой системы автоматического управления
Теория автоматического управления - молодая наука, оформившаяся в самостоятельную общенаучную дисциплину в начале XX века. Истоки ее инженерных методов...
-
Ввиду неточности определений характеристик управляемого объекта, неполноты его описания, наличия возмущений различного рода, деградаций самой элементной...
-
Проблема управляемости - это ликвидация начального рассогласования [4]. Рассматривается это понятие через программное управление (поиск управления как...
-
Линейная замкнутая система Рассмотрим линейную стационарную непрерывную управляемую систему: (1.1) - вектор состояния системы, - управление, - выход...
-
CoDeSys -- универсальный инструмент разработки прикладных программ для программируемых логических контроллеров на языках стандарта IEC 61131-3. Данный...
-
На рисунке 1 представлен фрагмент электронной таблицы, в которой содержаться исходные данные для решения задачи. Рисунок 1 - Фрагмент электронной...
-
Основная цель системы ДИСКОР - совершенствование оперативного управления работой железных дорог на основе более эффективного использования пропускной...
-
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система. Рис. 2 Далее, следуя методическим указаниям,...
-
Под критическим значением параметра регулятора (K или Т) понимается такое значение (Ккр или Ткр), при котором система оказывается на границе...
-
Считается, что правильно организованный документооборот и электронный архив документов становятся необходимыми условиями эффективной работы современного...
-
Метод конечных элементов является численным методом для нахождения приближенных решений физических задач. В основе этого метода лежит разделение...
-
Если линейная система устойчива, то ее переходная функция будет с течением времени стремиться к постоянному значению, а весовая функция - к нулю....
-
Следующая группа символьных операций выполняется с выражениями, требующими указания переменной, по отношению к которой выполняется операция. Для этого...
-
Разомкнутый программный годограф инструментальный Программная среда Labview. Labview - это программная среда, использующая язык графического...
-
Для разделения действительной и мнимой частей передаточной функции умножим числитель и знаменатель передаточной функции на комплексно сопряженное число...
-
Вариант 14 Преобразовать структурную схему и найти передаточную функцию системы автоматического управления по управляющему воздействию. Рисунок 1.1.1...
-
Пересечение луча с поверхностью - Моделирование эффектов
Алгоритм расчета пересечения луча с ограниченной поверхностью, представленный на рис.1 имеет следующие шаги: Рисунок 1 Шаг 1. Рассчитываются все точки...
-
Очередность разработки Системы А) разработка программного обеспечения для ввода, редактирования и актуализации контента, синхронизации с хранилищем...
-
Конфигурация "Управление производственным предприятием" является современной многооконной системой. Каждое из ее окон (многие из которых -- диалоговые...
-
Перед началом непосредственного использования программы "Сервер опроса", следует создать рабочую конфигурацию сервера с помощью программы - конфигуратора...
-
Пожаром называют неконтролируемое горение во времени и пространстве, наносящее материальный ущерб и создающее угрозу жизни и здоровью людей. В...
-
Для разработки принципиальной электрической схемы, исходя из задания и выбранной элементной базы, составим структурную схему стенда, которая будет иметь...
-
Перспективной областью применения стандарта Zigbee являются беспроводные системы считывания показаний различных счетчиков. Данный сегмент рынка крайне...
-
Для реализации ИИС контроля расхода энергоресурсов проведем анализ характеристик существующих беспроводных технологий передачи данных. Наиболее...
-
Учебно-демонстрационный стенд "Система автоматического управления инженерными системами помещения" создается по нескольким причинам. Во-первых, в связи...
-
Постановка задачи нечеткого управления Была рассмотрена задача по прогнозированию износа (в микрометрах) тормозных дисков автомобилей. Входные данные:...
-
Возможности системы позволяют в едином информационном пространстве оперативно решать главные управленческие задачи, обеспечить менеджеров различного...
Второй способ: функционал с ограничением на компенсацию полюсов, реализация через переменные состояний - Проблемы конструирования устойчивой системы автоматического управления