Анализ и оптимизация системы средствами инструментальной системы MathLab - Определение наилучших параметров корректирующего устройства следящей системы
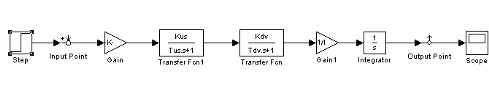
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система.
Рис. 2
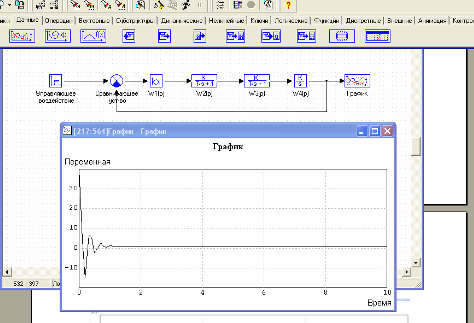
Далее, следуя методическим указаниям, зададим параметры модели и построим временную характеристику:
Рис. 3
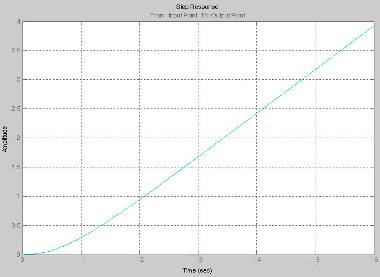
Из графика видно, что данная система неустойчива, переходный процесс при подаче единичного скачка стремиться к бесконечности.
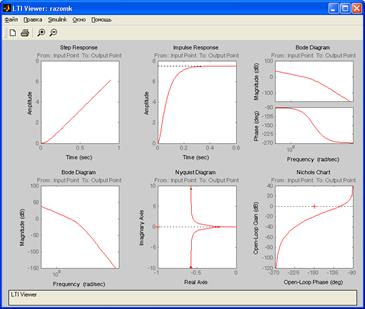
Рис. 4. Семейство характеристик разомкнутой системы
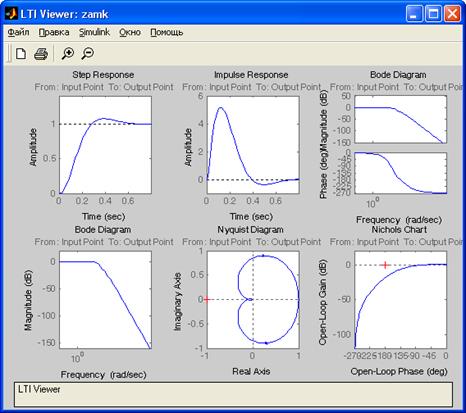
Анализ замкнутой системы
Рис. 5

Рис. 6
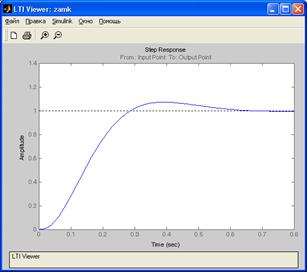
Из рисунка видно, что переходный процесс стремиться к единице, следовательно замкнутая система устойчива. Но требуется оптимизировать ее параметры.
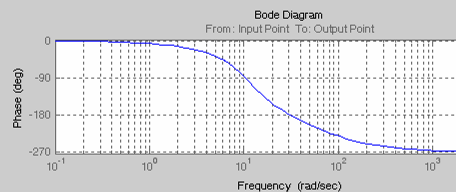
Рис. 7. Семейство характеристик замкнутой системы
Оптимизация системы

Для коррекции САУ введем звено.
Подбор оптимальных параметров будет происходить при помощи инструментального пакета (ИП) Nonlinear Control Design Blockset (NCD-Blockset), который предоставляет в распоряжение пользователя графический интерфейс для настройки параметров динамических объектов, обеспечивающих желаемое качество переходных процессов. В качестве средства для достижения указанной цели принимается оптимизационный подход, обеспечивающий минимизацию функции штрафа за нарушение динамических ограничений. При помощи данного инструмента можно настраивать параметры нелинейной Simulink-модели, в качестве которых может быть заявлено любое количество переменных, включая скаляры, векторы и матрицы.
Задание динамических ограничений осуществляется в визуальном режиме. На базе этих ограничений NCD-Blockset автоматически генерирует задачу конечномерной оптимизации так, чтобы точка экстремума в пространстве настраиваемых параметров соответствовала выполнению всех требований, предъявляемых к качеству процесса. Эта задача решается с привлечением специализированной процедуры квадратичного программирования из пакета Optimization Toolbox. Ход оптимизации контролируется на экране с помощью отображения графика контролируемого процесса и текущих значений минимизируемой функции. По завершении процесса его результат фиксируется в рабочем пространстве.
Для оптимизации САУ была создана новая Simulink-модель.
Рис. 8
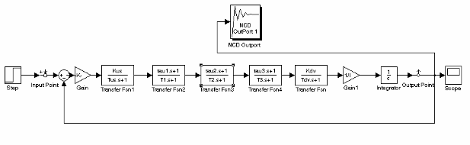
В схему включено корректирующее звено и блок оптимизации.
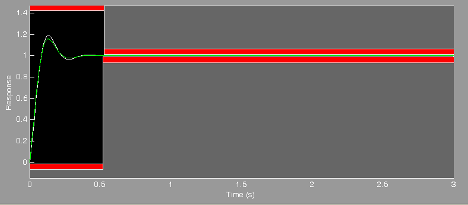
Приступим к заданию ограничений налагаемых на выход системы: Установим "коридор" в пределах которого, должен находиться выходной сигнал блока NCD Outport. Параметрами ограничивающими "коридор" являются время регулирования и перерегулирование.
При максимальных ограничениях(=40% =0,5) получим следующий переходный процесс:
Рис. 9
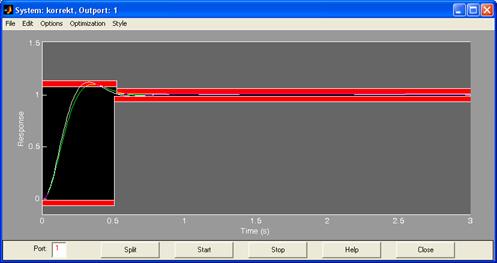
При других ограничениях трубки можно получить более оптимальный вид переходного процесса.
Рис. 10
Анализ системы полученной в результате коррекции
Рис. 11. Переходная характеристика
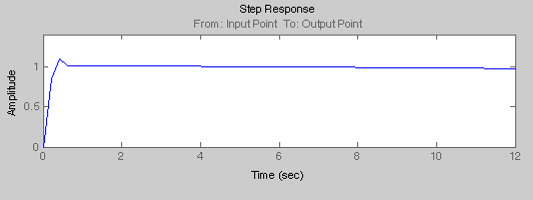
Рис. 12. Лачх
Из полученных графиков можно сделать вывод, что система устойчива и соответствует заданным требованиям.
Анализ и оптимизация системы средствами программного комплекса МВТУ.
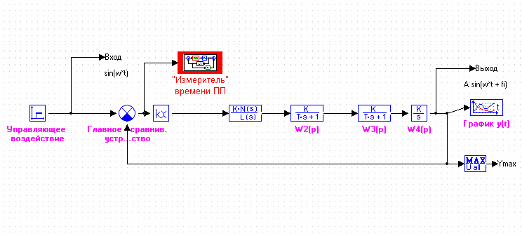
Произведем анализ устойчивости нескорректированной САУ. Структурная схема нескорректированной САУ представлена на рис. 13.
Рис. 13
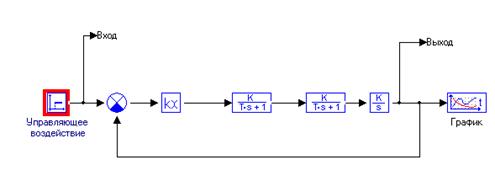
Рис. 14. Структурная схема нескорректированной САУ
Из графика видно, что замкнутая система устойчива, но обладает большим перерегулированием.
Рис. 15. Годограф Найквиста (замкнутая система)
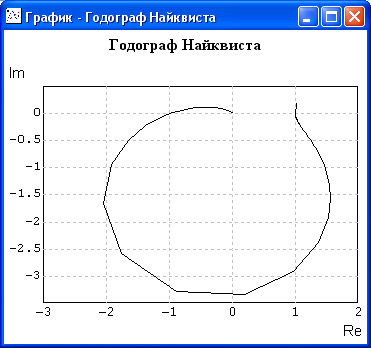
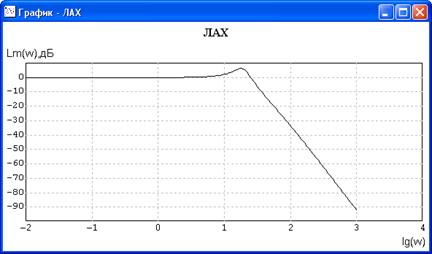
Рис. 16. Построение ЛАЧХ для замкнутой нескорректированной системы
Оптимизация системы.
Схема оптимизируемой системы представлена на рисунке 17.
Рис. 17
Зададим параметры оптимизации:
Рис. 18
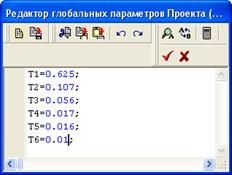
Рис. 19
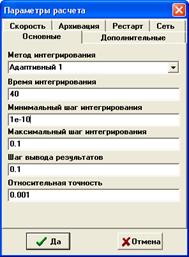
Рис. 20. Время регулирования 0,5 с и перегулирование 40%
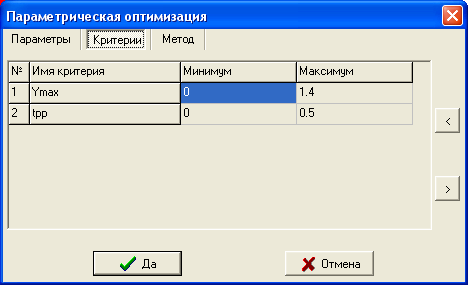
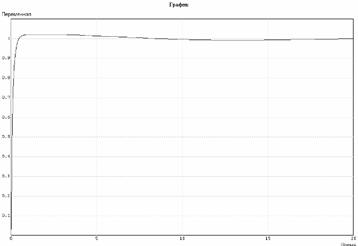
Рис. 21
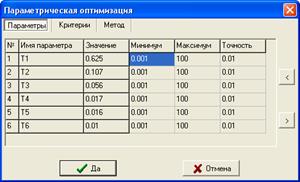
Рис. 22. График оптимизированной системы
Параметры tau1=2,36 Т1=11,99 tau2=0,96 T2=0,929 tau3=47,31 T3=0,001
Похожие статьи
-
Определить наилучшие параметры корректирующего устройства следящей системы, обеспечивающих устойчивость системы и выполнение требований технического...
-
Разомкнутый программный годограф инструментальный Программная среда Labview. Labview - это программная среда, использующая язык графического...
-
В результате курсового проектирования были закреплены методы и приемы автоматизированного расчета САУ. Разработана собственная программа на языке...
-
Развитие новых технологий постоянно ужесточает требования, предъявляемые к инженеру-конструктору. На первое место в современном конструировании выходят...
-
Вариант 14 Преобразовать структурную схему и найти передаточную функцию системы автоматического управления по управляющему воздействию. Рисунок 1.1.1...
-
Определение методов реинжиниринга информационных систем Основные задачи, которые стоят перед проектировщиком, занимающимся реинжинирингом информационных...
-
Под критическим значением параметра регулятора (K или Т) понимается такое значение (Ккр или Ткр), при котором система оказывается на границе...
-
Для разделения действительной и мнимой частей передаточной функции умножим числитель и знаменатель передаточной функции на комплексно сопряженное число...
-
Языки программирования высокого уровня - Инструментальные средства разработки экспертных систем
Языки высокого уровня являются в руках опытного программиста прекрасным средством быстрого создания прототипа экспертной системы, позволяют обеспечить...
-
В данной главе представлено описание возможных вариантов совершенствования архитектуры предприятия в части гибкого подключения сторонних систем и их...
-
Устойчивость элементов и устройств к внешним воздействиям. Характеристики климатических воздействий. Механическая прочность. Радиационная стойкость...
-
При разработке практически всех инструментальных средств за основу принимается методология автоматизации проектирования на базе использования прототипов....
-
Элементы и устройства автоматики
2 лекция. Типовые структуры и средства АСУ ТП. Локальные системы контроля, регулирования и управления. Автоматизированные системы управления...
-
На основе описания методов можно с уверенностью сказать, что данная система может успешно справляться с автоматизацией анализа документации. При этом...
-
Воспользуемся теперь для поиска решения функционалом (2.13). Пространство операторов В рассматриваем примере добавка (2.12) может быть представлена:...
-
Корпоративная интеграционная подсистема на базе IBM WebSphere Business Integration Message Broker [28] отвечает за выстраивание корпоративной...
-
Построение модели предметной области с помощью описания структур данных и программного кода является классическим подходом в разработке ИС. Зачастую...
-
После разработки рисунка ПП его необходимо проверить на соответствие исходной принципиальной схеме и соблюдение технологических ограничений. Для это...
-
Перечень предложений по совершенствованию процедур документооборота в подразделениях производственного предприятия с учетом перспектив внедрения системы,...
-
Анализ результатов расчетов - Оптимизация параметров двухступенчатого цилиндрического редуктора
Таблица 1. Исходные данные к расчету цилиндрической передачи Название Обозначение Величина Крутящий момент на входном валу I, Н-м 300 Частота вращения на...
-
Объектно-ориентированные языки - Инструментальные средства разработки экспертных систем
В главе 12 мы уже обращали ваше внимание на то, что формат правил хорошо согласуется с представлением знаний в форме "при выполнении условий СЬ ..., С"...
-
Интерфейсы систем управления. Классификация, основные характеристики интерфейсов. Системные (внутримашинные) интерфейсы. Интерфейсы персональных...
-
Для разработки программного продукта нами была выбрана СУБД Microsoft Access 2010, которая позволяет выполнять простейшие операции с данными: Ѕ добавить...
-
Значение параметра для State, Статуса Выполнения, Команды, метода и свойства метода упомянуты ниже для быстрой ссылки. Таблица 47.1 PUSH блок Функция...
-
Как отмечалось, входной язык системы MathCAD -- интерпретирующий. В интерпретаторах, например в добром старом Бейсике, листинг программы пользователя...
-
Чтобы не заканчивать эту главу на такой печальной ноте, я решил включить в последний раздел избранные максимы о построении экспертных систем, почерпнутые...
-
Кроме поддержки интерпретатора порождающих правил, описанного в главе 5, CLIPS обладает следующими функциональными возможностями: - для определения...
-
Без использования измерительных приборов невозможно представить многие грани человеческой деятельности:начиная от научной работы и заканчивая...
-
После того, как был реализован процесс карьерного планирования в информационной системе, можно сделать выводы о том, что внедрение информационной системы...
-
Конфигурация устройств ввода-вывода Турбо Паскаля - Программирование в среде Turbo Pascal
Результаты работы программы и исходные данные могут быть записаны в файлы на диске, с помощью специальных процедур работы с файлами прямо из программы. В...
-
Передача параметров с переменной скоростью - Вокодеры с линейным предсказанием
Большая часть разговорной речи содержит паузы. Кроме того информация, необходимая для точного представления исходного речевого сигнала, существенно...
-
1 сохранять в виде файлов различного формата (см. ниже); 2 выводить на печать (с помощью команды меню ФАЙЛ= Печать ); 3 вставлять в документы, созданные...
-
Классификации СППР - Система поддержки принятия решений
Для СППР отсутствует не только единое общепринятое определение, но и исчерпывающая классификация. Разные авторы предлагают разные классификации. На...
-
Необходимо исследовать зависимость влияния различных факторов на параметр, характеризующий производство. В качестве такого параметра было выбрано...
-
Описание задачи Рассматривается угловое движение спутника, в котором в качестве органов управления используются двигатели-маховики. Полет в условиях...
-
Программа COSMOSWorks - Система твердотельного моделирования SolidWorks
Адаптивный анализ сборок H-адаптивный способ детализацию сетки теперь поддерживает сборки. В прошлых версиях поддерживались только детали....
-
Создание модели исследуемой системы - Исследование устойчивости линейной автоматической системы
Структурная схема системы, исследуемой в лабораторной работе, представлена на рис.1. Параметры регулятора K и T будут изменяться в ходе выполнения работы...
-
Разделение жесткого диска, Файлы устройств и разделы - Операционная система Linux
Существует много программ, позволяющих создавать и удалять разделы. У большинства операционных систем имеются свои собственные и разумнее всего...
-
По заданному значению выбираем длину линии и удельное сопротивление линии. = 50 км; Марка провода ЛЭП: АС - 240 1.2 Расчет параметров модели...
-
Топология ПП представляет собой наглядное изображение проектируемой платы. Топология ПП включает: границы ПП, корпуса РЭК с посадочными местами,...
Анализ и оптимизация системы средствами инструментальной системы MathLab - Определение наилучших параметров корректирующего устройства следящей системы