Зональная навигация, Основы зональной навигации - Основы зональной навигации и ее применение в пилотажно-навигационном комплексе Garmin 1000
Зональный бортовой целостность приемник
Основы зональной навигации
В зарубежной практике на протяжении многих десятилетий маршруты полетов ВС строились таким образом, чтобы они проходили через наземные радиомаяки - как правило, радиомаяки VOR. Поскольку полет выполнялся "на" или "от" радиомаяка, бортовое оборудование (аналог отечественного КУРС МП) непосредственно определяло и индицировало на указателях типа ПНП (CDI или HIS) сторону и величину углового уклонения ВС. Это позволяло пилоту легко сохранять линию заданного пути, удерживая планку в центре прибора.
Наличие у летного экипажа в любой момент времени информации об отклонении от заданной траектории получило название навигационного наведения (guidance). Наведение практически на каждом участке маршрута и схемы маневрирования в районе аэродрома давно стало необходимым и само собой разумеющимся условием осуществления аэронавигации в большинстве стран мира.
Возрастание интенсивности воздушного движения к середине 80-х годов привело к тому, что обычных трасс, проходящих через радиомаяки, во многих регионах уже было недостаточно для обеспечения требуемой пропускной способности воздушного пространства. Стала обсуждаться возможность полетов по произвольным траекториям, не обязательно проходящим через радиомаяки. Для обеспечения таких полетов на борту ВС необходимо:
- 1) получать информацию о текущем местоположении ВС; 2) представлять информацию для пилота в виде отклонения от заданной траектории (обеспечить наведение).
Решение первой из этих задач первоначально основывалось на использовании угломерно-дальномерной системы, образованной радиомаяками VOR/DME, и позволяющей непрерывно измерять пеленг и дальность ВС (рисунок 1). Для решения второй задачи необходимо было иметь бортовой вычислитель, способный непрерывно рассчитывать по пеленгу и дальности линейное боковое уклонение и оставшееся расстояние, то есть преобразовывать полярные координаты в частноортодромические. Именно в этот период времени в бортовые навигационные системы стала интенсивно внедряться только что появившаяся компьютерная техника, что оказалось очень кстати для решения этой задачи.
Такая навигация по маршрутам, не проходящим через радиомаяки, получила название "зональной навигации" (area navigation, RNAV), поскольку ее осуществление было возможно только при нахождении ВС в пределах зоны действия (range, area) радиомаяка. Впоследствии для определения местоположения ВС стали использоваться и другие средства: инерциальные системы счисления координат, разностно-дальномерные и спутниковые системы. Несмотря на то, что теперь уже не было необходимости находиться в определенной "зоне", сам термин "зональная навигация" сохранился [1].
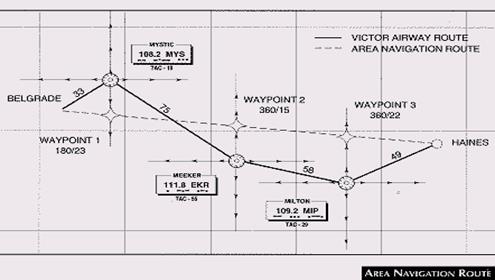
Рисунок 1 - Маршрут угломерно-дальномерной зональной навигации
История развития зональной навигации отразилась в том, каким образом давалось определение этого понятия в документах ИКАО. Если первоначально подразумевались только полеты в пределах зоны действия радиомаяков, то с появлением возможности автономного счисления пути понятие RNAV было расширено, и его определение давалось уже следующим образом: "Зональная навигация - метод навигации, позволяющий воздушным судам выполнять полет по любой желаемой траектории в пределах действия радиомаячных навигационных средств или в пределах, определяемых возможностями автономных средств или их комбинацией" [2].
Однако это определение оказалось излишне подробным. И уже второе издание этого же документа приводит определение в ныне существующем виде: "зональная навигация -- метод навигации, который позволяет воздушному судну выполнять полет по любой желаемой траектории".
Можно обратить внимание, что в этом кратком определении отсутствует в явном виде один из ключевых элементов RNAV - необходимость наведения по этой желаемой траектории. Из-за этого у российского пилота, впервые встретившегося с данным понятием, может возникнуть недоумение: а разве я без всякой зональной навигации не могу летать, как желаю? Но для зарубежных летчиков никакой неясности нет. Для них необходимость наведения является нормой - что за навигация без наведения?
В определении ИКАО зональная навигация названа "методом" навигации. По-видимому, это не совсем корректно. Ведь для осуществления RNAV могут использоваться самые разные методы навигации, способы определения местоположения ВС. Они могут быть основаны на использовании радиотехнических систем, систем счисления пути или, в перспективе, на каких-то иных принципах. Для сущности зональной навигации это безразлично. Да и не может "навигация" быть "методом навигации", то есть способом осуществления самой себя. Зональная навигация не метод, а разновидность навигации, которая отличается от обычной лишь двумя чертами: возможностью задания произвольных траекторий и обеспечением наведения при полете по ним. Поэтому более точное определение RNAV могло бы выглядеть следующим образом: "зональная навигация - навигация с использованием технических средств, обеспечивающих наведение при полете по любой желаемой траектории".
Оборудование, обеспечивающее возможность такой навигации, стали называть "оборудованием зональной навигации" или "оборудованием RNAV". Оно должно автоматически определять местоположение ВС по одному или нескольким навигационным датчикам и вычислять расстояние вдоль линии пути, боковое отклонение, время полета до выбранного пункта, а также обеспечить непрерывную индикацию отклонения на приборе типа ПНП или КПП, то есть обеспечить собственно наведение. Сама же траектория задается, как правило, геодезическими координатами (широтой и долготой) нескольких ее точек, называемых точками пути (waypoints).
Для отечественной аэронавигации принципы зональной навигации не являются чем-то абсолютно новым. Ведь в нашей стране, в отличие от зарубежной практики, воздушные трассы часто проходят через такие поворотные пункты маршрута, в которых не установлены никакие навигационные средства. Наведение при этом обычно отсутствует, и поэтому выдерживание ЛЗП в этом случае является более сложной для летных экипажей задачей. Это одна из причин наличия на борту ВС штурмана как члена экипажа.
Но в некоторых случаях обеспечивалось и наведение по произвольным линиям пути. Элементы зональной навигации в СССР впервые были реализованы в начале 60-х годов с появлением радиотехнической системы ближней навигации (РСБН). Наличие на борту в составе этой системы блока управления счетнорешающего прибора (БУ СРП) позволяло выполнять полет по линии пути, не проходящей через радиомаяк. При этом вертикальная планка прибора КПП показывала пилоту, с какой стороны находится ЛЗП, то есть осуществлялось наведение. Правда, точность, обеспечиваемая аналоговым вычислителем СРП, была не очень высока, да и не все самолеты имели такое оборудование. К тому же отсутствовало сплошное перекрытие зон радиомаяков на территории страны, а полеты разрешалось выполнять только по установленным воздушным трассам. Поэтому в те годы такой подход к навигации не получил широкого распространения, но по существу это и была RNAV.
Траектория планируемого полета может быть задана не только в горизонтальной плоскости в виде маршрута, но и в вертикальной - путем задания высот пролета точек пути, углов или градиентов наклона траектории. Кроме того, может быть задана пространственно-временная траектория, когда для некоторых точек задано время их пролета. В соответствии с размерностью (Dimension) "пространства", в котором осуществляется наведение, зональную навигацию разделяют на три вида:
- - 2D-RNAV - двухмерная RNAV в горизонтальной плоскости - LNAV (Lateral Navigation). Иногда, используя дословный перевод, ее называют боковой навигацией, поскольку наведение осуществляется только по боковому уклонению; - 3D-RNAV - трехмерная RNAV в горизонтальной и вертикальной плоскостях. Для навигации в вертикальной плоскости используется аббревиатура VNAV (Vertical Navigation); - 4D-RNAV - четырехмерная RNAV в горизонтальной и вертикальной плоскостях плюс решение задачи регулирования скорости полета для прохождения пунктов маршрута или прибытия на аэродром в заданное время. Зональная навигация по времени сокращенно обозначается TNAV (буква Т от слова Time).
Проблема внедрения зональной навигации состоит не просто в том, чтобы обеспечить полет по произвольной траектории, а в том, чтобы точность ее выдерживания соответствовала установленным в данном регионе требованиям. В современной аэронавигации эти требования устанавливаются в виде так называемых требуемых навигационных характеристик (RNP - Required Navigation Performance). Поэтому вопросы зональной навигации оказались тесно переплетены с проблемами RNP. Настолько тесно, что ныне эти два круга вопросов оказались объединенными в одном документе ИКАО. Ранее концепция RNAV и требования к ней содержались в документе ИКАО "Руководство по зональной навигации". В настоящее время он прекратил свое существование, но весь его материал вошел в "Руководство по требуемым навигационным характеристикам RNP Doc 9613, Монреаль, ИКАО, изд. 2. 1999". Теперь RNP рассматривается как инструмент технического и нормативного регулирования полетов с применением RNAV.
В зависимости от жесткости требований к точности выдерживания заданной траектории, а также от характера функциональных требований к бортовому оборудованию, широко используются следующие обозначения типов RNAV:
- - B-RNAV (Basic RNAV) - основная (базовая) зональная навигация; - P-RNAV (Precision RNAV) - точная зональная навигация; - RNP-RNAV - зональная навигация с требуемыми навигационными характеристиками.
Базовая или основная (Basic) зональная навигация (B-RNAV) была введена по инициативе Евроконтроля в регионе Западной Европы 29 января 1998 г. Требования к точности навигации соответствуют RNP 5, то есть ВС должно в течение 95% времени полета находиться в пределах ± 5 м. миль от линии заданного пути.
Евроконтролем определены некоторые функциональные и эксплуатационные требования к оборудованию B-RNAV. Для достижения RNP5 возможно использование различных датчиков навигационной информации, а именно:
- - двух маяков DME (режим DME/DME); - одного маяка VOR/DME, расположенного не далее 62 м. миль от ВС; - одной инерциальной системы с коррекцией по радионавигационной или спутниковым системам: - одного приемника GPS. соответствующего необходимым требованиям [3].
Введение B-RNAV позволило обеспечить использование имеющегося навигационного оборудования без изменения существующей структуры маршрутов ОВД в регионе Западной Европы.
Опыт выполнения полетов в регионе действия B-RNAV показал, что процесс навигации существенно упростился, а точность повысилась.
К точной (Precision) зональной навигации (P-RNAV) относится зональная навигация, в которой действуют требования к точности, соответствующие типу RNP1, и некоторые функциональные требования к оборудованию RNAV, но при этом не требуется соблюдение всех остальных "классических" аспектов RNP согласно "Руководству по требуемым навигационным характеристикам RNP". Применение P-RNAV обусловлено возможностью повышения точности навигации, а, следовательно, и пропускной способности воздушного пространства в аэроузловых зонах (ТМА) с интенсивным воздушным движением.
Для достижения требуемой для P-RNAV точности возможно использование следующих типов датчиков навигационных сигналов:
- - GPS без каких либо функциональных дополнений; - двух DME или одного VOR/DME, расположенных в определенных местах ТМА.
Использование инерциальных систем возможно только в течение нескольких минут после взлета или очередной коррекции по VOR/DME, DME/DME или GPS. В основном ИНС выполняет роль инерциальной поддержки оборудования RNAV для повышения ее готовности и непрерывности обслуживания. Но эти важные характеристики классических RNP для Европейской P-RNAV не являются обязательными, и это является главным отличием P-RNAV от RNP1. Поэтому решающего значения для сертификации оборудования по P-RNAV его инерциальная составляющая не имеет.
При введении в ТМА процедур P-RNAV авиационные власти государств и соответствующие службы ОрВД (ASM) должны гарантировать, что:
- 1) все процедуры P-RNAV в этой ТМА:
- - не противоречат техническим положениям ИКАО, представленным в "Производство полетов воздушных судов. Том 2. Правила производства полетов. Doc 8168, вкл. поправку 12. Монреаль, ИКАО. 1993"; - разработаны в соответствии с обязательными требованиями Евроконтроля "Guidance Material for Design of Terminal Procedures for Area Navigation (DME/DME, B-GNSS, Baro-VNAV &; RNP-RNAV); - учитывают функциональные и технические характеристики систем P-RNAV, предписанные в документе "Guidance Material for Design of Terminal Procedures for Area Navigation (DME/DME, B-GNSS, Baro-VNAV &; RNP-RNAV"; - учитывают, что использование вертикальной навигации VNAV для P-RNAV не является обязательным и что возможно использование обычных методов вертикального наведения; - опубликованы так, что на схемах процедур P-RNAV указаны радиалы, пеленги и дальности от наземных маяков до точек пути, используемых в процедурах, чтобы летный экипаж мог дополнительно контролировать пролет этих точек по наземным РТС,
ИКАО является не единственной международной организацией, занимающейся вопросами установления и выполнения требований к точности аэронавигации, внедрения в авиационную практику научных разработок и передового опыта обеспечения безопасности полетов. Занимаются этим EUROCONTROL, RTCA и ряд других организаций [1].
Важный вклад в развитие концепций RNAV и RNP вносит RTCA (Radio Technical Commission for Aeronautical - Радиотехническая комиссия по аэронавтике). Это некоммерческая международная организация, членами которой являются авиакомпании, государственные ведомства разных стран, производители авионики и поставщики аэронавигационной информации. Образованные RTCA комиссии ведут работу по различным направлениям деятельности и выпускают документы, которые обобщают мировой опыт в области авиации, учитывают перспективы и тенденции ее развития. Рекомендации RTCA, хотя и именуются стандартами, формально не имеют статуса международного или национального стандарта. Но их часто берут за основу правительственные органы разных стран для создания своих национальных стандартов (например, TSO - Technical Standard Order, принятые в США).
В то время как членами ИКАО являются государства в лице их официальных представителей, в работе комиссий RTCA участвуют непосредственно участники практической авиационной деятельности (инженеры, летчики, ученые и т. д.) - все заинтересованные стороны. Вследствие этого документы RTCA более близки к потребностям сегодняшней практики, являются более оперативными, а иногда и более глубокими. Как правило, со временем основные положения документов RTCA проникают и в документы ИКАО.
Важной составляющей CNS/ATM, необходимой для эффективного функционирования авиационной транспортной системы, является обеспечение точной аэронавигации ВС. Требуемая точность полета обеспечивается с помощью навигационных систем, Но эти системы должны быть не только точными, но и надежными, обеспечивать необходимую непрерывность обслуживания, обладать целым рядом других качеств. В связи с этим одна из комиссий RTCA разработала минимальные стандарты, на характеристики авиационных систем (MASPS), необходимые для зональной навигации в условиях RNP.
Чтобы отличать расширенные требования RTCA от обычных требований RNP, приведенных в "Руководстве по требуемым навигационным характеристикам RNP", для них введено обозначение RNP RNAV. Поэтому, если ВС удовлетворяет требованиям RNP RNAV, то оно удовлетворяет и требованиям RNP такого же типа. Обратное, конечно, вовсе не обязательно [4].
Новыми элементами в RNP RNAV являются введение концепции удерживания (Containment Concept), а также установление требований к точности зональной навигации по высоте (VNAV) и времени.
RNAV рассматривается ИКАО как основной вид навигации будущего, поскольку она обладает целым рядом неоспоримых преимуществ перед навигацией обычной, традиционной:
- 1) Полеты становятся более безопасными за счет повышения точности навигации. Это связано с тем, что при введении RNAV в каком-либо регионе одновременно вводятся и требования к точности (в виде RNP). 2) Увеличивается пропускная способность и эффективность использования воздушного пространства, как на маршрутах, так и в районах аэродромов. Это происходит с одной стороны за счет увеличения количества маршрутов в данном объеме воздушного пространства (теперь они не обязательно должны проходить через радиомаяки), а с другой - за счет уменьшения интервалов бокового эшелонирования, которое оказывается теперь возможным, поскольку точность навигации стала выше. 3) Появляется возможность сделать структуру маршрутов динамичной, легко меняющейся в зависимости от обстановки. При этом могут быть учтены интересы как гражданской, так и государственной авиации. Гибкость RNAV позволяет избежать скопления ВС в определенных участках воздушного пространства, серьезных уплотнений маршрутов и появления "воздушных пробок". 4) Маршруты можно устанавливать более короткими, что приводит к экономии авиатоплива и уменьшению летного времени. 5) При наличии наведения летный экипаж более наглядно представляет себе навигационную ситуацию, что позволяет избежать неправильных решений и ошибок. 6) Уменьшается нагрузка как пилота, так и диспетчера за счет возможности отказаться от радиолокационного наведения (векторения), осуществляемого диспетчером в районе аэродрома. 7) Оказывается возможным сократить количество наземных навигационных средств.
При применении методов RNAV должны быть выполнены следующие обязательные условия:
- - если оборудование RNAV использует сигналы наземных или спутниковых средств, то оно должно устойчиво принимать эти сигналы на всем протяжении полета по маршруту или маневрирования в районе аэродрома; - координаты точек пути (WPT - waypoints) должны определяться и публиковаться в АИП государств во Всемирной геодезической системе координат WGS-84 и с требуемой точностью, разрешением и целостностью; - оборудование RNAV должно быть сертифицировано для выполнения полета по маршруту и в районе аэродрома; - летный экипаж должен иметь допуск к выполнению полетов по маршрутам RNAV и в районе аэродрома [1].
Похожие статьи
-
Типы RNP подразделяются на маршрутные, аэроузловые и аэродромные. ИКАО определила в качестве основных (стандартных) типы RNP, которые представлены в...
-
Воздушные суда, сертифицированные по менее строгим типам RNP, не будут допускаться в воздушное пространство с более строгими типами RNP. Воздушные суда,...
-
Характеристики комплекса G1000 Комплекс G1000 представляет собой комплексную полнофункциональную систему, выполняющую пилотажные функции, функции...
-
Дипломная работа по теме "Основы зональной навигации и ее применение в пилотажно-навигационном комплексе GARMIN 1000" содержит 3 раздела. В ходе...
-
Для реализации принципа зональной навигации на борту ВС должны решаться следующие задачи: - определение текущего местоположения ВС; - хранение информации...
-
RNP определяют характеристики навигации в определенном воздушном пространстве и влияют как на организацию самого воздушного пространства, так и на...
-
Существующая система навигации ориентирована на наземные навигационные средства наведения, например радиомаяки VOR, NDB или приводные радиостанции,...
-
В легко доступном для экипажа месте должен находиться документ "Комплекс Garmin G1000. Справочное руководство", номер 190-00384-08 (в соответствующей...
-
Подготовка к полету 1) При подготовке к полету необходимо убедиться в том, что навигационная инфраструктура на время предполагаемого полета обеспечит...
-
Концепция требуемых навигационных характеристик (RNP) является подходом к установлению требований к точности и надежности аэронавигации в том или ином...
-
Процедуры при нештатных ситуациях должны быть разработаны заявителем и должны включать случаи срабатывания сигнализации о следующих отказах: - отказы...
-
Подход - Основы зональной навигации и ее применение в пилотажно-навигационном комплексе Garmin 1000
1) Еще до начала выполнения маневра подхода экипаж должен убедиться в том, что нужная процедура загружена (в систему RNAV). Активный план полета должен...
-
Осуществление навигации невозможно без применения систем координат. При использовании СНС для целей аэронавигации используется геоцентрическая система...
-
ИКАО в "Приложении 11 Обслуживание воздушного движения. 13-е изд., Монреаль, ИКАО, 2001" и в "Производство полетов воздушных судов. Том 2. Правила...
-
Вылет - Основы зональной навигации и ее применение в пилотажно-навигационном комплексе Garmin 1000
1) Экипаж должен убедиться, что база данных бортового оборудования действующая и что начальные координаты ВС введены корректно. Активный план полета...
-
AAIM (Aircraft Autonomous Integrity Monitoring) - бортовая автономная система контроля целостности; ADS (Automatic Dependent Surveillance)-...
-
Для наблюдения за достоверностью информации, полученной от спутников, бортовое оборудование СНС должно иметь функцию автономного контроля целостности...
-
Допущения, принятые при расчетах в базах данных G1000 Траектория и конечный пункт рассчитываются исходя из следующих условий: - Скорость - путевая...
-
Рассмотрим некоторые коды ARINC, используемые в G1000 (на примере карты подхода, рисунок 7): Рисунок 7 - карта подхода Идентификаторы пеленга и...
-
Корпорация "Авиационное радио" (англ. Aeronautical Radio, Incorporated, ARINC) -- компания, основанная в 1929 году, один из мировых лидеров в разработке...
-
Современные технологии, используемые для решения задач, связанных с планирование грузовых автомобильных перевозок, в логистике позволяют значительно...
-
Понятие и роль транспорта в коммерческой деятельности Транспорт играет важную роль в развитии экономики страны, связывая промышленность и сельское...
-
А) первому уровню оплаты труда по ТСР Б) по второму уровню В) по третьему уровню Г) по четвертому уровню При применении сдельно-премиальной системы...
-
Структурированные кабельные системы(СКС) Структурированная кабельная система (СКС) - это единая инфраструктура, которая лежит в основе функционирования...
-
Применение СPS - Спутниковые навигационные приемники
Навигационная система APOLLO 2001 GPS Аппаратура APOLLO 2001 GPS является аппаратурой спутниковой навигации и предназначена для определения...
-
Состав комплекса машин и оборудования для механизации конкретного вида путевых работ зависит от многих факторов: конструкции пути, состава...
-
Схемы применения цифро-аналоговых преобразователей относятся не только к области преобразования код - аналог. Пользуясь их свойствами можно определять...
-
Транспортная характеристика грузов Консервы в ящиках : Консервы в ящиках (коробках) хранятся в сухих, светлых, чистых, хорошо вентилируемых помещениях, с...
-
Измерение температуры термометрами электрического сопротивления (ТС) основано на свойствах проводников и полупроводников изменять свое активное...
-
А) ?П = (ЧЭ/ЧР-ЧЭ)*100 Б) ?П = (ЧЭ-ЧР/ЧЭ)*100 В) ?П = (ЧР-ЧЭ/ЧР)*100 Г) ?П = (ЧЭ/ЧР+ЧЭ)*100 Где ЧЭ - уменьшение численности работников за...
-
Данная деталь изготавливается за два перехода (рисунок 27). Для изготовления оснастки детали необходимо создать ТхЭМ детали первого перехода (рисунок...
-
Размещения оборудования на перегоне Средствами контроля подвижного состава оснащают в первую очередь удлиненные грузонапряженные участки безостановочного...
-
В процессе выполнения курсового проекта, мы систематизировали, закрепили и получили новые знания по дисциплине "Техническое обслуживание автомобилей"....
-
Промислові мережі - інтегровані, відкриті промислові комунікації. Промисловий Ethernet (IEEE 802. 3) міжнародний стандарт для мереж що мають як...
-
Визначення структури і складу системи керування робиться за допомогою конфігуратора HW Config , який є складовою частиною язика програмування. Він...
-
Скорости движения - Технические основы создания машин
Скорости движения автогрейдера определяют в значительной мере его производительность. Величина скорости обычно ограничивается в рабочем режиме...
-
Аналитический Метод применим только при линейных нагрузках. Графический Метод применим Для любых нагрузок (линейных или нелинейных), и отличается...
-
H2 = , Отсюда получим h = 1.79 Рассчитаем вероятность неправильного принятия решения в рассматриваемом приемнике (ДЧМ, КГ). Воспользуемся формулой...
-
Описание гидравлической схемы машины - Технические основы создания машин
Гидросистема (см. СДМ. МС413.15.00.00 ГС) служит для управления рабочим оборудованием и поворотом машины. Гидросистема включает в себя два...
-
После проведения указанных выше расчетов, определения параметров остойчивости и расчета посадки судна строят диаграмму статической остойчивости (ДСО)....
Зональная навигация, Основы зональной навигации - Основы зональной навигации и ее применение в пилотажно-навигационном комплексе Garmin 1000