Скорости движения - Технические основы создания машин
Скорости движения автогрейдера определяют в значительной мере его производительность. Величина скорости обычно ограничивается в рабочем режиме технологическими соображениями (качество выполняемых работ, квалификация машиниста, видимость и т. д.), а в транспортном - мощностью двигателя и дорожными условиями. Поэтому у автогрейдеров с механической трансмиссией коробки перемены передач имеют два диапазона: рабочий и транспортный. Для эффективного использования мощности дизеля передаточные отношения в диапазонах образуют геометрическую прогрессию. Показатель прогрессии для трансмиссии автогрейдеров равен q=1,4...1,6. Принимаем q=1,6. Тогда передаточные отношения и скорости рабочего диапазона определяется по формулам:
VР2=VР1 q, VР3=VР1 q2 (13)
Ен = п / 30 (14)
Где п=1500 об/мин; - радиус качения колеса,
Ен= 1500/30=157 рад/с,
;
;
;
VР2=0,9 1,6=1,44 м/с;
VР3=0,9 1,62=2,3 м/с.
Для определения передаточных отношений и скоростей транспортного диапазона сначала определяется передаточное отношение на высшей передаче иТ3 этого диапазона - из условия обеспечения максимальной транспортной скорости VТ. мах при номинальной угловой скорости вращения вала дизеля Ен:
(15)
(16)

. После этого определяются остальные передаточные отношения и соответствующие скорости движения:
ИТ2 = иТ3 q
ИТ1 = иТ3 q2 (17)
VТ2=VТ. тах /q; VТ1=VТ. тах /q2 (18)
ИТ2 = 6,97 1,6=11,15;
ИТ1 = 6,97 1,62=17,84
VТ2 = 12,5 /1,6=7,8 м/с;
VТ1 = 12,5 /1,62=4,88 м/с.
Найденный диапазон передаточных отношений обеспечивается трехступенчатой коробкой перемены передач и ходоуменьшителем (мультипликатором) с передаточным отношением:
Uр = Vm3 / Vр3
В рабочем диапазоне и uM=1 в транспортном диапазоне.
Передаточное отношение мультипликатора: иР=12,5 /2,56=4,88
6. Производительность автогрейдера
Производительность автогрейдера зависит от его основных параметров, условий работы и выражается в объеме вырезанного и перемещенного грунта в единицу времени, в километрах спрофилированной дороги или квадратных метрах спланированной площади.
Производительность в метрах возведенной насыпи за час:

(19)
Где L - длина участка, м (L=2000м);
- - коэффициент использования рабочего времени (=0,8...0,9); - продолжительность рабочего цикла,

(20)
Где - числа проходов в одном направлении при копании грунта, при боковом перемещении грунта и при отделки насыпи соответственно;
- - средние действительные скорости движения автогрейдера, соответствующие этим проходам, определенные с помощью тяговой характеристики, м/с; - время на переключение передач, (=5...6 с).
Величину можно принять соответствующей действительной скорости движения на первой передаче в режиме номинальной тяги (); принимается равной 0,9 в режиме сопротивлениие перекатыванию тяговых колес). Перемещение грунта и планировочные рабрты проводят на //-й передаче в режиме номинальной тяги ().
Число проходов при копании:

(21)
Где - площадь поперечного сечения кювета, (=1,5);
K - удельное сопротивление копанию расчетного грунта грейдерным отвалом (k=;
M'- коэффициент, учитывающий неравномерность толщины срезаемой стружки (м=1,3).
5,3
Число проходов при перемещении:

, (22)
Где - средняя потребная длина перемещения грунта, ( от внутренней бровки кювета до продольной оси земляного полотна =1м.);
- - перемещения грунта за один прохода (=2,2м); - коэффициент перекрытия проходов при перемещении(=1,15).
=2,77
Количество проходов по отделке принимают равным 6...8:

=70134с.
- 87,3 8. Задания к выполнению домашней работы
Цель работы заключается в исследовании аналитическими методами некоторых динамических явлений в механизме с последовательно расположенными массами.
Задачи работы:
- 1. Определить приведенные характеристики механизма: массы и моменты инерции звеньев, коэффициенты жесткостей связей, вращающие моменты и силы; 2. Изобразить приведенную схему механизма (эквивалентный вал); 3. Упростить приведенную схему до трех - и четырехмассной систем (расчетных схем). Составить для них системы уравнений свободных колебаний, вычислить собственные частоты колебаний; 4. Составить двухмассную расчетную схему и определить максимальную динамическую нагрузку и коэффициент динамичности в канате при разгоне подвешенного груза. 1. Исходные данные:
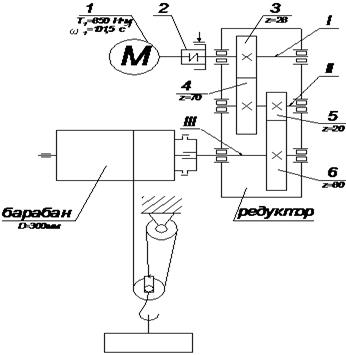
Исследуется механизм подъема груза, состоящий из электродвигателя 1, муфты-тормоза 2, двухступенчатого редуктора, барабана 7. полиспаста и крюковой подвески.
Необходимые исходные данные приведены в таблице 1.
Таблица 1 - Исходные данные:
|
Обозначение |
Единицы измерения |
Значение |
|
I1 |
Кг-м2 |
1,4 |
|
I2 |
Кг-м2 |
1,1 |
|
I3 |
Кг-м2 |
0,06 |
|
I4 |
Кг-м2 |
0,3 |
|
I5 |
Кг-м2 |
0,1 |
|
I6 |
Кг-м2 |
1 |
|
I7 |
Кг-м2 |
5 |
|
M8 |
Кг-104 |
1 |
|
C12 |
Н-м /рад-105 |
2,4 |
|
C23 |
Н-м /рад-105 |
2,4 |
|
C45 |
Н-м /рад-105 |
9,4 |
|
C67 |
Н-м /рад-105 |
8,1 |
|
C34 |
Н /м-108 |
9,6 |
|
C56 |
Н /м-108 |
14,4 |
|
Z4 /z3 |
69 /30 | |
|
Z6 /z5 |
81 /18 | |
|
L |
М |
4 |
|
Щ1 |
С-1 |
75,9 |
|
T1 |
Н-м |
1550 |
|
R7 |
М |
0,2 |
|
Х8 |
М-с-1 |
0,488 |
|
R3 |
М |
0,06 |
|
R4 |
М |
0,138 |
|
R5 |
М |
0,054 |
|
R6 |
М |
0,243 |
|
D |
М |
0,0195 |
Центр приведения - звено 4.
Рисунок 1 - Схема механизма подъема:
2. Общие положения:
Исследование динамических процессов существенно упрощается, если представить механизм в виде совокупности сосредоточенных масс, соединенных безынерционными упругими связями, условно посаженными на стержень или ось и в установившееся движении имеющих одинаковые скорости, равные скорости тела, принятого в качестве центра приведения. в первом приближении такая модель будет в динамическом смысле эквивалентна натуре, если:
- 1) каждая из масс до и после приведения имеет неизменной величину кинетической энергии. В соответствии с этим определением приведенной массой или приведенным моментом инерции называют такие их значения, при которых тело после приведения, т. е. при движении со скоростью центра приведения, имеет такой же запас кинетической энергии, как и до приведения; 2) каждая из упругих связей до и после приведения имеет неизменной величину потенциальной энергии деформации; 3) силовые факторы (силы, моменты) до и после их приведения оказывают одинаковое воздействие на массу в центре приведения, совершают одинаковую работу.
Рисунок 2 - Расчетная эквивалентная схема:
3. Вычисление приведенных характеристик:
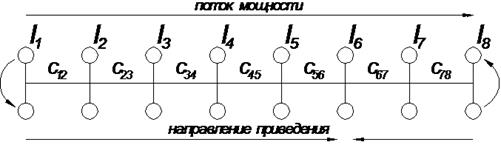
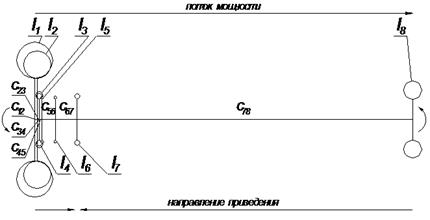
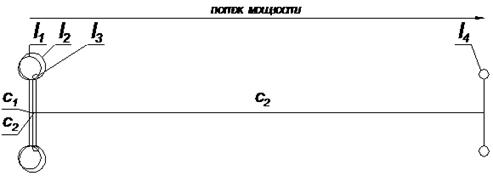
Кинематическая схема механизма приведена на рисунке 1. Расчетная эквивалентная схема механизма изображена на рисунке 2. Рассчитанные значения приведенных характеристик сведены в таблицу 2. Эквивалентный вал изображен на рисунке 3.
Приведенные моменты инерции:

(1)
Где - приведенный момент инерции j-ого тела;
- передаточное отношение от центра приведения до j-ого тела.
Приведенный момент инерции груза:
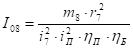
(2)
Где - масса груза;
- радиус барабана;
- передаточное отношение полиспаста.
Передаточное отношение от центра приведения до тела:

(3)
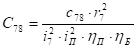
Приведенные жесткости:

(4)
Где - коэффициент жесткости связи двух элементов.
Приведенная жесткость груза:
(5)
Вращающие моменты приведенные к центру приведения:

(6)
Приведенный момент груза:
(7)
В формулах (1), (4) и (6) необходимо поставить также величену коэффициента полезного действия передачи от центра приведения до приводимого участка. При этом кпд ставят в числитель, если направление потока энергии совпадает с направлением приведения, и в знаменатель если нет.
Таблица 2 - Характеристики механизма после приведения:
|
Обозначение |
Единицы измерения |
Численные значения |
Обозначение |
Единицы величин |
Численные значения |
|
I1 |
Кг-м2 |
1,4 |
I01 |
Кг-м2 |
7,258 |
|
I2 |
Кг-м2 |
1,1 |
I02 |
Кг-м2 |
5,703 |
|
I3 |
Кг-м2 |
0,06 |
I03 |
Кг-м2 |
0,311 |
|
I4 |
Кг-м2 |
0,3 |
I04 |
Кг-м2 |
0,3 |
|
I5 |
Кг-м2 |
0,1 |
I05 |
Кг-м2 |
0,1 |
|
I6 |
Кг-м2 |
1 |
I06 |
Кг-м2 |
0,05 |
|
I7 |
Кг-м2 |
5 |
I07 |
Кг-м2 |
0,252 |
|
C12 |
Н-м /рад-105 |
2,4 |
С12 |
Н-м /рад-106 |
1,244 |
|
C23 |
Н-м /рад-105 |
2,4 |
С23 |
Н-м /рад-106 |
1,244 |
|
C45 |
Н-м /рад-105 |
9,4 |
С45 |
Н-м /рад-105 |
9,4 |
|
C67 |
Н-м /рад-105 |
8,1 |
С67 |
Н-м /рад-104 |
4,082 |
|
C34 |
Н /м-108 |
9,6 |
С34 |
Н /м-107 |
1,828 |
|
C56 |
Н /м-108 |
14,4 |
С56 |
Н /м-106 |
4,285 |
|
C78 |
Н /м-105 |
С78 |
Н /м-103 |
7,601 | |
|
T1 |
Н-м |
1550 |
T01 |
Н-м |
3,424Ч103 |
|
Т08 |
Н-м |
1,49797Ч103 |
Рисунок 3 - Эквивалентный вал:
4. Составление частного уравнения и вычисление собственных частот:
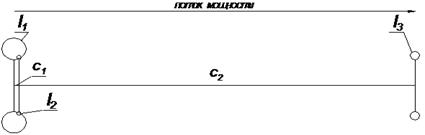
Этот пункт выполнен в двух вариантах - сначала для упрощенной трехмассной, а затем для упрощенной четырехмассной систем. При упрощении до трехмассой системы детали механизма сгруппированы путем суммирования приведенных масс следующим образом:
- - в массу (маховик) 1 включен ротор электродвигателя, муфта-тормоз, первый вал редуктора с шестерней; - в массу 2 включены остальные валы редуктора с шестернями и барабан; - в массу 3 включен поднимаемый груз.
Рисунок 4 - Трехмассная система:
Частотное уравнение для трехмассной системы:
(8)
Где А - буквенное обозначение равное:
(9)
В - буквенное обозначение равное:
(10)
С - буквенное обозначение равное:
(11)
Все расчеты выполнены с помощью ПЭВМ в программе Mathcad, результаты приведены в приложении. При упрощении до четырехмассной системы массы сгруппированы следующим образом:
- - масса 1 - ротор электродвигателя плюс 0,25 массы муфты-тормоза; - масса 2 - 0,75 массы муфты-тормоза плюс первый вал редуктора с шестерней; - масса 3 - остальные валы редуктора с шестерней плюс барабан; - масса4 - поднимаемый груз.
Рисунок 5 - Четырехмассная система:
Частотное уравнение для четырехмассной системы:
(12)
Где А - буквенное обозначение равное:
(13)
В - буквенное обозначение равное:
(14)
С - буквенное обозначение равное:
(15)

Все расчеты выполнены с помощью ПЭВМ в программе Mathcad, результаты приведены в приложении.
5. Расчет продолжительности разгона механизма:
Для этого сначала определили суммарное ускорение движения центра приведения механизма при разгоне как единого твердого тела:
(16)
Продолжительность разгона:
(17)
Похожие статьи
-
Второе условие. Мощности двигателя должно быть достаточно для обеспечения движения автогрейдера с максимальной транспортной скоростью VТ тах = 8,3...12,5...
-
Определение основных параметров автогрейгера, Масса автогрейдера - Технические основы создания машин
Основными параметрами автогрейдера являются мощность двигателя, колесная формула, размер шин, первая расчетная рабочая скорость и максимальная расчетная...
-
Размеры отвала, Высота отвала, Длина отвала - Технические основы создания машин
Высота отвала Высота отвала определяется из условия непересыпания грунта через отвал при разработке кювета концом отвала. Это условие соблюдается, если...
-
Выбираем расчетный подъем Расчетный подъем - это наиболее трудный для движения в выбранном направлении элемент профиля пути, на котором достигается...
-
Расчет коэффициента динамичности, Список литературы - Технические основы создания машин
Максимальная приведенная нагрузка в полиспасте при разгоне подвешенного груза: (18) Величина коэффициента динамичности: (19) Список литературы...
-
Выбор размеров базы и колеи - Технические основы создания машин
Ширина колеи назначается из условий обеспечения поперечной устойчивости при движении автогрейдера и вписывания в габарит подвижного состава по ГОСТ 9420...
-
Описание гидравлической схемы машины - Технические основы создания машин
Гидросистема (см. СДМ. МС413.15.00.00 ГС) служит для управления рабочим оборудованием и поворотом машины. Гидросистема включает в себя два...
-
Согласно варианту 12 исходными данными для определения сил сопротивления движению автомобиля и мощностей на их преодоление являются: тип пожарного...
-
Определение по тяговой характеристике максимальной силы тяги локомотива Чтобы определить силу тяги локомотива при различных скоростях движения,...
-
Начальная скорость автомобиля при торможении V0 = 30 км/ч. Тормозной путь Sт - путь, проходимый автомобилем от момента срабатывания тормозного привода до...
-
Определение максимальной скорости движения автомобиля на i-ой передаче Под приемистостью автомобиля понимают его способность быстро увеличивать скорость...
-
Данный график позволяет определить: затраты топлива на любом участке пути, сумму всех затрат, расход топлива на единицу транспортной работы, максимальную...
-
В России многолетним опытом автомобильного транспорта и выполненными исследованиями обосновано сформирована система ТО и ремонта. Техническая...
-
S, м T, c Авт 1 Авт 2 400 32 25 1000 46,7 47,8 Вывод: Приемистость автомобиля - способность быстро увеличивать скорость движения. Оценочными параметрами...
-
Подвижный поезд тяговый тормозной Расчет массы состава при условии движения на расчетном подъеме с равномерной скоростью Если длина труднейшего подъема...
-
Диагностирование - Содержание и регламентации системы технических осмотров и ремонтов машин
Диагностирование - Процесс определения технического состояния объекта с определенной точностью (объекты диагностирования -- машина или ее составная...
-
Скорость сообщения Скорость сообщения (VC) - это скорость, не учитывающая простои на конечных остановках. Где LМ - длина маршрута, км., TОб - время...
-
Согласно [45] подвижной состав должен иметь регулируемое отопление салона и кабины водителя. Лобовое стекло кабины должно обогреваться для предотвращения...
-
Рассмотрим порядок расчета, построения ЭМХ, а также нахождения интересующих параметров ТЭД на примере электродвигателя ТЛ-2К1 электровозов ВЛ10 и...
-
Т'сц=Тсц - (W2+W3+W4+W5) Т'сц=288,45 - (55,2+33,7+4,7+19,2) =175,6кН Запас тягового усилия по мощности двигателя: Т'маш=ТN - (W2+W3+W4+W5) Т'маш=246,8-...
-
Текущее ускорение автомобиля на I -ой передаче при любой скорости движения V определяется по формуле (47): Трансмиссия передача камаз разгонный (47) На...
-
В результате сползания грунта образовался завал на проезжей части автомобильной дороги, для разбора завала привлекается землеройная и транспортная...
-
Колеса, шины - Устройство и техническое обслуживание Мерседес 123
Для автомобиля MERSEDES 123 пригодны разные колеса и шины. Допустимы только диски колес с глубиной выдавки 30 мм посадочного диаметра 14" или35 мм с...
-
Расчет выходного частотного фильтра - Основы проектирования приборов и систем
В качестве выходного фильтра целесообразно применить фильтр нижних частот (ФНЧ) с плоской АЧХ (фильтр Баттерворта), имеющий максимальный коэффициент...
-
Технологическая карта - Содержание и регламентации системы технических осмотров и ремонтов машин
Для наиболее рациональной организации работ по ТО, ремонту и диагностированию автомобилей, его агрегатов и систем составляются различные технологические...
-
Разное давление воздуха в шинах Установите нормальное давление в шинах Нарушение углов установки колес Отрегулируйте углы установки колес Разрушение...
-
Расчет диаграмм равнодействующих сил Для определения мероприятий по усилению системы электроснабжения межподстанционной зоны участка Медвежья Гора -...
-
Технологические процессы - Содержание и регламентации системы технических осмотров и ремонтов машин
Технологические процессы различаются в зависимости от их построения на: единичные, типовые и групповые. Единичный технологический процесс строится для...
-
Наименование разработки: Разработка генератора с мостом Вина Основание для создания: Материалы научно-методических разработок. Назначение и цель...
-
Способ технической реализации - Основы проектирования приборов и систем
Выходные величины проектируемого ИПАМ, напряжение и ток, содержат помехи в виде как свободных апериодической и колебательных составляющих, так и...
-
Схема технологического процесса на зоне представлена на рисунке 2. Основные маршруты Возможные маршруты Маршруты выборочного диагностирования Рисунок 2 -...
-
Назначение и технические характеристики вагона - Подвижной состав железных дорог
Вагоном называется единица подвижного состава железнодорожного транспорта, предназначенная для перевозки грузов и пассажиров. Вагоны пассажирского или...
-
Допущения, принятые при расчетах в базах данных G1000 Траектория и конечный пункт рассчитываются исходя из следующих условий: - Скорость - путевая...
-
Выбрать и обосновать структурную схему устройства. Выбрать и обосновать принципиальную схему устройства. Определить основные характеристики устройства и...
-
Современный процесс разработки технического устройства можно разбить на следующие составные части: Научно-исследовательская работа (НИР);...
-
Для пневмопривода тормозных систем автомобилей конструкций прошлых лет (ЗиЛ, МАЗ, КрАЗ, КамАЗ) регулировку зазора производят изменением положения 28...
-
Порты, портовые сооружения и их техническая эксплуатация
Порты, портовые сооружения и их техническая эксплуатация Расчет потребности порта в грузовых причалах. Погрузочно-разгрузочные работы выполняются в три...
-
Годовой объем работ по технологическим воздействиям АТП определяется в чел-ч и состоит из объемов работ по техническому обслуживанию (ЕО, ТО - 1, ТО -...
-
Введение - Техническое обслуживание и ремонт тормозной системы
Я, Зарипов Денис, представляю свою дипломную работу по теме тормозная система. В данной дипломной работе мне удалось отразить все необходимое для...
-
ПРОВЕРКА ОБЩЕЙ ПРОЧНОСТИ КОРПУСА СУДНА - Основы управление флотом и технология перевозки грузов
Мизг = Мо + Мгр - Мсп; Где: Мизг Ї изгибающий момент от сил тяжести на миделе порожнего судна; Мо Ї изгибающий момент от масс грузов и запасов (сил...
Скорости движения - Технические основы создания машин