Тягово-скоростные свойства - Повышение профильной проходимости автомобиля
Совокупность свойств, определяющих возможные по характеристикам двигателя и сцеплению ведущих колес с дорожным покрытием диапазоны изменения скоростей движения автомобиля и его максимальные ускорения разгона.
Анализ расчетных показателей тягово-скоростных свойств колесной машины позволяет определять предельные дорожные условия, в которых еще возможно движение автомобиля, а также оценивать возможность буксировки в конкретных дорожных условиях прицепа заданной массы. Решение обратной задачи - задачи синтеза - дает возможность определить конструктивные параметры автомобиля, которые позволят:
- - обеспечить заданные скорости движения и ускорения разгона в конкретных дорожных условиях; - преодолеть заданные подъемы и буксировку прицепа заданной массы.
В зависимости от соотношения деформаций колеса и опорной поверхности различают четыре вида взаимодействия колеса с дорогой:
- 1) качение жесткого колеса по жесткой (практически недеформируемой) поверхности (рис. 1.1, а); 2) качение эластичного колеса по недеформируемой поверхности (рис. 1.1, б); 3) качение жесткого колеса по деформируемой (податливой) поверхности (рис. 1.1, в); 4) качение эластичного колеса по деформируемой поверхности (рис. 1.1, г).
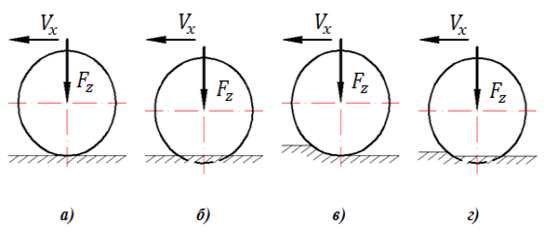
Рис. 1.1. Виды взаимодействия колеса и опорной поверхности
Первый из рассматриваемых случаев относится к варианту качения стального колеса трамвая или поезда по рельсовому пути и в теории автомобиля обычно не используется. Три остальных случая характеризуют взаимодействие колеса автомобиля с различными дорожными поверхностями. При этом наиболее типичным является второй случай, соответствующий движению колеса с эластичной шиной по дороге с твердым покрытием (асфальт, асфальтобетон, брусчатка). В реальной эксплуатации встречается также третий случай, когда автомобиль движется по свежевыпавшему снегу и деформации шины значительно меньше деформаций снежного покрытия, а также четвертый случай, когда автомобиль (колесный трактор) движется по податливым грунтовым дорогам.

На рис.1.2 показаны основные геометрические параметры автомобильного колеса и шины. Здесь - диаметр наибольшего окружного сечения беговой дорожки шины ненагруженного колеса;


- посадочный диаметр обода; - ширина профиля шины;


- высота профиля шины; - коэффициент высоты профиля шины.
Очень важным, с точки зрения теоретических расчетов, является правильный выбор радиуса качения автомобильного колеса.
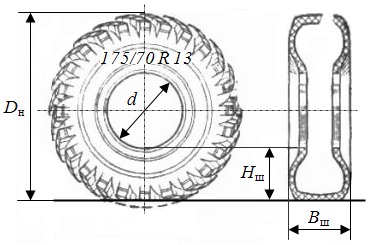
Рис. 1.2 Основные геометрические параметры и маркировка шины автомобильного колеса
В теории качения эластичного колеса по твердой (недеформируемой) поверхности оперируют четырьмя основными радиусами.

Свободный радиус - радиус наибольшего окружного сечения беговой дорожки шины ненагруженного колеса (т. е. при отсутствии его контакта с поверхностью дороги).

, (1)


Статический радиус - расстояние от центра неподвижного колеса, нагруженного вертикальной силой, до опорной поверхности (рис. 1.3)

(2)

Где - коэффициент вертикальной деформации шины;

- для радиальных шин легковых автомобилей;

- для шин грузовых автомобилей и автобусов, а также для диагональных шин легковых автомобилей.

Коэффициент зависит от величины вертикальной нагрузки на шину и от давления воздуха в шине, при этом с увеличением нагрузки уменьшается, а с увеличением давления - увеличивается.




Динамический радиус - расстояние от центра катящегося колеса до опорной поверхности (рис. 1.4). На величину, точно также, как на, влияют вертикальная нагрузка на колесо и давление воздуха в шине. Кроме того, динамический радиус несколько увеличивается с ростом угловой скорости вращения колеса и уменьшается с ростом передаваемого колесом крутящего момента. Противоположное влияние и на изменение обусловило то, что для дорог с твердым покрытием часто принимают.



Радиус качения (кинематический радиус) - отношение продольной скорости колеса к его угловой скорости вращения :

(3)

Радиус качения сильно зависит от величины и направления передаваемого колесом крутящего момента и сцепных свойств шины с дорожным покрытием. Если не превышает 60% значения, при котором наступает буксование колеса или его юз, то эту зависимость можно считать линейной. При этом в ведущем режиме зависимость имеет вид:

(4)
А в тормозном режиме (т. е. когда меняет направление)

(5)

Где - радиус качения колеса в ведомом режиме (когда );


Коэффициент тангенциальной эластичности шины.


Радиус качения колеса в ведомом режиме определяется экспериментально путем прокатывания нагруженного заданной вертикальной нагрузкой колеса на 5?10 полных оборотов (оборотов) и замера его пути качения. Так как, то



(6)
Рассмотрим характерные случаи:
1. Ведомый режим:

Ситуацию иллюстрирует рис. 1.5, а. В этом случае:

2. Режим полного буксования (рис. 1.5, б).

(максимальный момент колеса по сцеплению с дорогой);

Тогда

3. Режим юза (рис. 1.5, в).

Тогда


Рис. 1.5. Радиусы качения колеса: а - ведомый режим; б - режим буксования; в - режим юза







Рассмотренные случаи показывают, что диапазон возможных значений радиуса качения автомобильного колеса в реальных условиях изменяется от нуля до бесконечности, т. е. Это хорошо иллюстрирует график зависимости от (рис. 1.6). Видно, что в диапазоне значений от до происходит некоторое увеличение практически по линейному закону. Для большинства шин при работе в указанном диапазоне передаваемых колесом моментов. В зонах от до и от до зависимость сложная нелинейная, при этом в первой зоне по мере увеличения передаваемого колесом крутящего момента резко устремляется к нулю (полное буксование), а во второй зоне по мере возрастания тормозного (отрицательного) момента величина быстро уходит в бесконечность (режим чистого скольжения без вращения, т. е. так называемый юз).
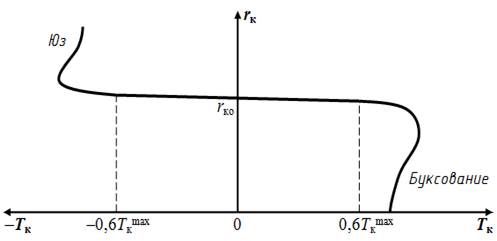
Рис. 1.6 Зависимость радиуса качения rк колеса от величины и направления передаваемого им момента Тк
Характерное для всех стран постоянное стремление к повышению скоростей движения автомобилей и возрастающая плотность транспортных потоков приводят к увеличению напряженности процесса управления транспортным средством, что в свою очередь создает условия для ухудшения ситуации с безопасностью движения. Одним из мероприятий, способствующих частичному решению проблемы повышения безопасности движения, является автоматизация управления автомобилем. В числе наиболее доступных и эффективных способов автоматизации, обеспечивающих упрощение и облегчение управления автомобилем в городских условиях движения, когда ручное переключение передач у обычных механических трансмиссий приходится производить каждые 15?30 с, наиболее перспективным считается применение автоматических трансмиссий.
На легковых автомобилях и автобусах наибольшее распространение получили гидромеханические автоматические трансмиссии. Гидромеханическая автоматическая трансмиссия или гидромеханическая передача (ГМП) - это сочетание не требующего вмешательства в свою работу гидродинамического устройства и механической коробки передач с автоматизированным процессом переключения [36].
Похожие статьи
-
Торможение - процесс создания и изменения искусственного сопротивления движению автомобиля с целью уменьшения его скорости или удержания неподвижным...
-
Маневренность проходимость тормозной автомобиль Основные эксплуатационные свойства автомобиля В общем случае понятие эксплуатационные свойства...
-
Тягово-скоростными свойствами называется совокупность свойств, определяющих возможные по характеристикам двигателя или сцепления ведущих колес с дорогой...
-
Нормальные реакции передней и задней осей определяются по формулам: ; . Т. к. замедление связано с коэффициентом сцепления колес с дорогой, для большей...
-
Определение тяговой силы, Pт=f(V) Cила, обеспечивающая движение автомобиля - тяговая сила, находится для каждой передачи по формуле 7: PIТ =...
-
При построении графиков силового баланса для различных передач и скоростей движения автомобиля рассчитывают значения составляющих уравнения силового...
-
Общее заключение по тормозным свойствам автомобиля - Конструкция автомобилей
Тормозные свойства автомобиля - совокупность свойств, определяющих максимальное замедление автомобиля при его движении на различных дорогах в тормозном...
-
Тяговая диаграмма движения автомобиля При установившемся движении на ровной дороге уравнение тягового баланса , (14) Где PK - тяговое усилие на ведущих...
-
Тягово-скоростные характеристики автомобиля - Расчет автомобиля Урал-4320
Тягово-скоростные характеристики, к которым относятся скорость движения, тяговые усилия на ведущих колесах и динамический фактор автомобиля, определяются...
-
Построение графика ускорения - Эксплуатационные свойства автомобиля
, где D и ш берутся из динамической характеристики для груженого автомобиля и горизонтальной дороги; G - ускорение свободного падения, ? 9,81м/с2; Д...
-
Автомобильный транспорт потребляет значительное количество топлива, стоимость которого составляет 10-15% всех затрат на автомобильные перевозки. Расход...
-
Все формулы для расчета смотри выше. При скорости Va=110 км/ч: При ц = 0,2; St= 30,5*(0,5+0,5* 0,05)+0,05*30,52/0,2= 234,85м;...
-
Тормозные свойства пожарных автомобилей - Расчет машин для проведения аварийно-спасательных работ
Согласно варианту 12 задания исходными данными для определения сил сопротивления движению автомобиля и мощностей на их преодоление являются: Автомобиль...
-
Определение мощности двигателя Мощность двигателя можно определить КВт (1) = = 90,90 кВт Где GA - полный вес автомобиля, Н: GA = G0+ GГ, GA = 1360+550...
-
Тяговой характеристикой автомобиля называется зависимость свободной силы тяги от скорости движения на различных передачах в заданных дорожных условиях....
-
Анализ тормозных свойств - Эксплуатационные свойства автомобилей
Анализируя зависимость тормозного и остановочного путей от скорости движения автомобиля можно заметить, что величина остановочного пути больше, чем...
-
Заключение по топливно-экономическим свойствам автомобилей - Конструкция автомобилей
Топливная экономичность автомобилей зависит от характеристик двигателя, трансмиссии, ходовой части и т. п. На расход топлива двигателем существенное...
-
Потребительские свойства характеризуются способностью удовлетворять требования владельца автомобиля (водителя, пассажира) и не связаны непосредственно с...
-
Динамический фактор по сцеплению . Тогда условие безостановочного движения автомобиля, выраженное в динамических факторах будет иметь вид Для построения...
-
Согласно внешней скоростной характеристики двигателя рассчитанное значение Мmах=230,32 Нм немного больше реального значения, а nм=2900 об/мин, что меньше...
-
Уравнения баланса мощности могут быть выражены через мощность двигателя Ne: Скоростной двигатель мощностной автомобиль Или через мощность на колесах Nk:...
-
ПОТРЕБИТЕЛЬНЫЕ СВОЙСТВА ЛЕГКОВЫХ АВТОМОБИЛЕЙ - Транспортные средства
Потребительные свойства автомобилей классифицируются на четыре группы: функциональные, эргономические, эстетические и надежность. Функциональные свойства...
-
Расчет тягового и мощностного балансов АТС - Эксплуатационные свойства автомобилей
С помощью уравнений силового и мощностного балансов можно находить все параметры, характеризующие тягово-скоростные свойства автомобиля. Эти уравнения...
-
Топливная экономичность автомобиля - Определение эксплуатационных свойств автомобиля КамАЗ 6520
Топливной экономичностью называется совокупность свойств, определяющих расход топлива автомобилем при выполнении определенной транспортной работы в...
-
Согласно варианту 12 исходными данными для определения сил сопротивления движению автомобиля и мощностей на их преодоление являются: тип пожарного...
-
На колесных ТС, предназначенных для эксплуатации на дорогах с твердым покрытием, грунтовых дорогах различного состояния, можно применять систему...
-
Мощностная диаграмма движения автомобиля - Конструкция и эксплуатационные свойства Audi A4 Avant
Для анализа динамических качеств автомобиля наряду с уравнением силового баланса можно воспользоваться уравнением мощностного баланса. Мощность...
-
Текущее ускорение автомобиля на I -ой передаче при любой скорости движения V определяется по формуле (47): Трансмиссия передача камаз разгонный (47) На...
-
Авт 1 Авт 2 Внешняя скоростная характеристика N e max =70,8кВт(3800) M e max =211,6Нм(2200) N e max =74,6кВт(2400) M e max =220Нм(4000) Вывод: Тяговой и...
-
Тяговые и тормозные качества автомобиля тесно связаны между собой и определяют его динамичность. Чем выше средняя скорость движения, тем лучше должны...
-
Коэффициент, учитывающий степень загрузки дизельного двигателя: , где Р -- степень загрузки двигателя. При p = 0,2: K N = 1,2 + 0,14 - 1 - 1,8 - 12 +...
-
Автомобиль Газ 33023 преодолевает путь равный 400 метров до скорости 24 м/с за время, приблизительно, 25 секунд. А 1000 метров до скорости,...
-
В соответствии с заданием, в курсовой работе необходимо провести тягово-скоростной анализ автомобиля Volkswagen Passat при движении по дороге с суммарным...
-
Расчет ускорения, времени и пути разгона АТС - Эксплуатационные свойства автомобилей
Под приемистостью автомобиля понимают его способность быстро увеличивать скорость движения. Оценочными параметрами являются: максимально возможное...
-
Внешние скоростные характеристики = 1, где N E - мощность двигателя в любом режиме движения, кВт, при текущем значении угловой скорости коленчатого вала...
-
Зависимости - Эксплуатационные свойства автомобиля
Скорость движения автомобиля, км/ч: , где Щ E - текущая угловая скорость коленчатого вала, рад/с; R K - радиус качения колеса, м; I Рк - передаточное...
-
Определение времени разгона автомобиля - Конструкция и эксплуатационные свойства Audi A4 Avant
График времени разгона характеризует приемистость автомобиля. Время разгона автомобиля при изменении скорости движения от V1 до V2 определяется по...
-
Определение максимальной скорости движения автомобиля на i-ой передаче Под приемистостью автомобиля понимают его способность быстро увеличивать скорость...
-
Начальная скорость автомобиля при торможении V0 = 30 км/ч. Тормозной путь Sт - путь, проходимый автомобилем от момента срабатывания тормозного привода до...
-
Так как в техническом задании определена максимальная скорость движения автомобиля, то передаточное число главной передачи определяется, исходя из...
Тягово-скоростные свойства - Повышение профильной проходимости автомобиля