Розрахунок системи керування - Експлуатація і дослідження системи автоматичного управління стерновим електрогідравлічним приводом

Для розрахунку САК курсом судна необхідно розпоряджатись передаточною функцією об'єкта керування або гідродинамічними коефіцієнтами, по котрим можливо її визначити. Маємо заданий гідропривід стерна с передаточною функцією. Визначаємо коефіцієнт Кгп, момент на керуючім органі насоса М, швидкість переміщення керуючого органа насоса и. м, максимальний кут переміщення керуючого органа насоса и. м max. Окрім цього, необхідно вибрати перетворюючі елементи, знати мінімально допустиму похибку ковзання. ККД механічних передач. Для проведення моделювання слід також розпоряджатись обмежуваннями, в частості максимальними кутами перекладки стерна [2].
Данні розрахунку: КГз = 0,101 с-1; ТОк = 9,81 с; Т1 = 3,31 с; Т2 = 2,86 с; максимальний момент на керуючому органі насоса МСт max = 5,88 Нм; максимальний кут повороту керуючого органа насоса = 0,7 рад/с; ККД механічних передач = 0,8; максимально допустима похибка ковзання = 0,5; кривизна вимірювальних (перетворюючих) елементів КПэ = 0,2; коефіцієнт передачі гідроприводу КГп = 0,2 с-1;
1. Вибір електродвигуна (керуючого органа насоса). Потужність двигуна визначають величиною навантаження, яка через понижуючий редуктор приладжена до валу двигуна. У процесі роботи слідкуючої системи двигуну доводиться переборювати деякий момент опору, складений з статичного Мст і динамічного Мдин моментів. Статичний момент знаходиться тертям і механічним моментом, приладженим до валу двигуна.
Якщо відомий статичний момент [12], то маємо
РНагр = МСт max И. м = 5,88 0,7 = 4,1Вт,
Необхідну потужність двигуна знаходимо за виразом

Вт.
Знаходимо за каталогом АД з порожнистим ротором типа АДП-262, який має слідуючи данні [9]:
Uус = 110 В; ри. д = 9,5 Вт; nн = 1850 об/хв; Мн = 4,910-2 Нм;
МП = 8,810-2 Нм; JВ. д = 1,610-6 Нмс2.
Номінальну частоту обертання АД при роботі під навантаженням беремо від 50% до 70% від синхронної. Приймемо
И. д = 0,65Н = 126 рад/с,
Де Н = 2nН/60 = 6,2831 = 194 рад/с.
Тоді передаточне число редуктора буде:

.
Перевіримо обраний двигун за моментом. Для цього визначимо

.
Таким чином, М = 41,210-3 МН = 49,110-3. Двигун обрано вірно.
Визначимо коефіцієнти передаточної функції двигуна. За допомогою виразів:
; ; ; ,

Знаходимо ;
;







; .
2. Розрахунок коефіцієнта передачі підсилювача. Для підсилення сигналу перетворюючого елемента при використанні малосильного виконавчого двигуна типа АДП використовують в основному полупровідникові підсилювачі. Значення коефіцієнта підсилювання обирають з вимог забезпечення номінальної напруги двигуна при максимальній допустимої похибки системи:

;
Крутизна перетворюючих елементів КПэ = 0,148 рад/с; коефіцієнт передачі КИнт і КДиф: КИнт. нач = 0,02 с-1, КДиф. нач = 1; постійна часу ТДиф = 1 с; коефіцієнт передачі редуктора Р1 в прямому ланцюгу:
КР1 = 1/432 мм/град; коефіцієнт передачі редуктора Р2 в ланцюгу зворотного зв'язку за кутом : КР2 = 0,8 град/мм; коефіцієнт передачі редуктора Р3 в ланцюгу зворотного зв'язку за кутом : КР3 = 1,5; коефіцієнт зворотного зв'язку за кутом курсу судна при пропорційномукеруванні: К = 1; максимальна напруга на виході підсилювача: UУс max = 120 В;

Коефіцієнт передачі гідроприводу КГп == 0,2 с-1;
Максимальний кут перекладки стерна max = 35;
Коефіцієнт передачі сельсін-датчиков КСд = КСд = 0,148 В/град;

Коефіцієнт в системі керування для КО і коефіцієнт h1 = 2,02. Значення коефіцієнтів КО: q21 = 0,94; r21 = - 0,59; s21 = - 0,292; q31 = - 2,41;
R31 = 5,32; s31 = - 3,36.
3. Вибір корегувальних ланцюгів слідкуючої системи керуванням кермом і будування перехідного процесу. В результаті вибору основних елементів може бути складена структурна схема не корегувальної слідкуючої системи (рис.4.8).
Коефіцієнт передачі розімкненої слідкуючої системи рівний [2]:

Для забезпечення оптимального керування с законом
=

Введемо негативний зворотній зв'язок за ПЭ3 ПЭ2. Підставимо знайдене значення К і отримаємо:

.



Враховуючи вищесказане раніш міркування, а також те, що сумування сигналів відбувається на вході підсилювача П, зворотній зв'язок введемо не за и. м, а за. Структурна схема слідкуючій системи після введення корегувальних зворотних зв'язків буде виглядати, зображена на рис.4.9. Для реалізацій отриманого коефіцієнта при и. м використовують редуктор с передаточним числом і2, тобто, , звідки і2 = 4760.
4. Передаточна функція скорегованої слідкуючої системи.
Маємо:

Отримана передаточна функція уявляє собою передаточну функцію коливання ланки, так як корні р1,2 = 5,155,3 j.

Параметри ланки: ; ; К = 1.

5. Будування перехідного процесу при одиничному впливанні. Реакція коливання ланки на одиночне впливання може бути представлена в виді:

,


Де ; .
В розглянутому випадку при одиничному впливанні на вході (t) = 1 реакція системи буде наступна: .
6. Вибір корегувальних ланцюгів системи автоматичного керування курсом судна. Закон оптимального керування для САК курсом судна може бути представлена в такому виді:

,
Де КГз - коефіцієнт передачі об'єкта керування (гідро ланка);
- загальна постійна часу судна.
Підставивши початкові данні, будемо мати: ,
Тоді

.

Коефіцієнт при в законі керування для реальної системи знаходимо співвідношення між коефіцієнтом передачі перетворюючого елемента в прямому ланцюгу КПэ1 і коефіцієнтом КПэ3 в ланцюгу зворотного зв'язку за кутом. Дійсно, коефіцієнт при є коефіцієнтом передачі замкнутої слідкуючої системи, котрий рівний відношенню. В реальних системах КПэ1 залишається постійним і рівним, 0,2 В/град, а значення коефіцієнта КПэ2 може змінюватись в результаті зміни напруги збудження, подаваного на сельсин, в межах від 0,4 до 4 В/град. При цьому коефіцієнт передачі замкнутої слідкуючої системи змінюється від 0,5 до 5. Таке регулювання передбачене для того, щоб було можливе підстроювання системи в залежності від умов плавання. При сильному хвилюванні систему роблять грубшаю, тобто зменшують коефіцієнт слідкуючої системи і разом с тим чуттєвість системи к зовнішнім впливанням.
Тоді коефіцієнт передачі в ланцюгу зворотного зв'язку слідкуючої системи керування кермом повинен бути рівний КПэ3 = КПэ1 = 0,065 В/град = 3,64 В/град.
Сигнал, пропорційний розбіжності за курсом, реалізується в системі за допомогою диференційованого операційного підсилювача, маючи передаточну функцію:

,
Де Тдиф = 1 с.
Оскільки сигнал потрапляє на вхід диференційованого пристрою у вигляді напруги U від перетворюючого елемента ПЭ1, с коефіцієнтом передачі
0,2 В/град, а потім - на вхід замкненої частини слідкуючої системи с коефіцієнтом передачі, то коефіцієнт передачі Кдиф диференційованого пристрою визначається як відношення розрахованого значення коефіцієнта при в законі керування до добутку коефіцієнтів передачі Кпе1 і Кз. с. с:


.
Передаточна функція інтегруючого пристрою

.
В реальних системах значення Кинт = 0,02 с-1.
На цьому розрахунок і вибір елементів САУ курсом судна закінчується.
7. Визначення запасів стійкості системи методом логарифмічних амплітудно-частотних характеристик і будування перехідного процесу. Для отримання ЛАХ системи знайдемо передаточну функцію розімкненої системи керуванням курсом за заданим впливом, котра уявляє собою (рис.4.10) послідовно з'єднані блоки корекції, слідкуючу систему і об'єкт керування:


.
Підставимо числові значення і, враховуємо, що тепер Кгз = 0,065, будемо мати:

ЛАХ має зломи на слідуючи частотах: 1 = 0,0265 с-1; 2 = 0,035 с-1;
3 = 0,0755 с-1; 4= 0,102 с-1; 5 = 0,302 с-1; 6 = 1 с-1; 7 = 2,2 с-1; 8 = 8,3 с-1. Як видно система володіє запасом стійкості за модулем L = 15дБ і фази = 67.
Розрахунок САУ взагалі закінчують будуванням кривих перехідного процесу. Для визначення перехідного процесу скористаємося методом речових трапецеїдальних характеристик. Побудуємо графіки перехідного процесу при вхідному впливу зад = 35. Врахувавши, що в реальних системах при переході на заданий курс більш 10 відключається інтегруючий пристрій, знаходимо передаточну функцію речову частотну характеристику при Кинт = 0. Передаточна функція САУ в цьому випадку буде мати вид:

,
Де

Підставимо числові значення:

Для побудування дійсної частотної характеристики (ВЧХ) в отриманому виразі оператор р замінимо на j, тоді:
.
Дійсну частотну характеристику, найдемо, виділивши з Ш(j) дійсну частину:


.
На цьому закінчується вибір основних параметрів СК. ЛАХ і перехідні процеси показані відповідно на рис.4.11 і рис.4.12.
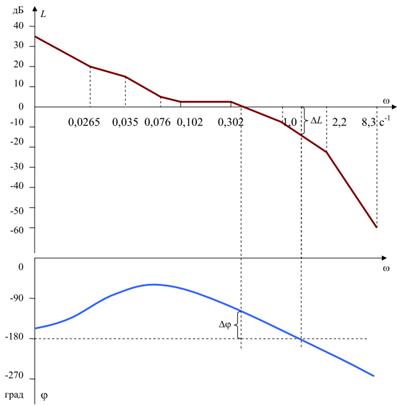
Рис.4.11 ? Логарифмічна амплітудна та фазова характеристики САУ СП.
Похожие статьи
-
Скористуємося розділенням автоматичної системи керування курсом судна на слідуючи функціональні блоки [2,3]: - керований об'єкт (судно), керованим...
-
Розрахунок параметрів насоса. Маючи характеристику, Мб (), можемо визначити залежність питомого тиску в циліндрах стернової машини від кутів перекладки...
-
Системи керування курсом і положенням судна у взаємодії з автоматизованим електроприводом забезпечують виконання основної задачі судноводіння, що полягає...
-
Перша особливість системи автоматичного керування рухом судна за курсом обумовлюється великою інерцією судна як об'єкта керування і зміною його...
-
Класифікація системи автоматичного керування стернових електроприводів За ступеню автоматизації керування стернові електроприводи поділяються на приводи:...
-
Стерновий виконавчий двигун впливає на балер стерна через проміжну передачу. Єднальний передавальний механізм є перетворювачем швидкості і моменту, що...
-
Момент на балері балансирного стерна [10,12]: , Де СN, СM, СY, СX - коефіцієнт моменту, нормальної сили і лобового опору відповідно; k1 k2 - коефіцієнти,...
-
На даний час усі судна морського і річкового флоту, незалежно від їхнього призначення, обладнаються автоматизованими стерновими приводами і авто...
-
Початкові данні Для розрахунку потужності електродвигуна стернової машини належить мати головні розміри і елементи судна, к яким відносяться: - тип судна...
-
Стерновий пристрій Стерновий пристрій забезпечує керованість судна, тобто воно дозволяє утримувати судно на курсі чи змінювати напрямок руху, незважаючи...
-
Класифікація стернових електроприводів Використовувані на транспортних суднах стернові електроприводи відрізняються великим розмаїттям. Це пов'язано з...
-
Розрахунок проводиться з урахуванням наступних основних вимог: А) напруга UН І номінальний струм IНАпаратури повинні відповідати напрузі і тривалому...
-
Запишемо передаточну функцію замкнутої системи: Знайдемо зображення динамічної похибки замкнутої системи: Випишемо коефіцієнти чисельника і знаменника...
-
В гідравлічній передачі діють наступні сили, H [10,12] (рис.4.2): РР - сила тиску румпеля на цапфи пресів, що виникає від тиску води на перо стерна, сила...
-
Аналітичні методи побудови перехідних характеристик грунтуються на розв'язку диференціального рівняння системи. Для цього може бути використаний як...
-
Випалювання цегли. - Розрахунок автоматизованої системи управління температурою в тунельній печі
Випалювання цеглини проводиться в тунельній печі з плоским зведенням і верхнім розташуванням пальників. Таблиця 4. Технічна характеристика тунельної...
-
Визначення структури і складу системи керування робиться за допомогою конфігуратора HW Config , який є складовою частиною язика програмування. Він...
-
Системи автоматичного управління, призначення, приклад - Системи автоматичного управління
Система автоматичного управління (САУ) підтримує або поліпшує функціонування керованого об'єкта. У ряді випадків допоміжні для САУ операції (пуск,...
-
При розробці і настроюванні систем автоматичного керування важливо встановити вплив окремих параметрів на їх стійкість. Для визначення областей...
-
За серійності виробництва АСР : - Системи автоматичного управління
- Тиражовані АСР, тобто розробники АСР припускають серійне виробництво та впровадження системи на мережах багатьох операторів зв'язку; - АСР одиничного...
-
Розрахунок силової частини і вузлів системи керування - Транзисторний перетворювач із дроселем
Розрахунок силової частини 1) Проведемо прикидочний розрахунок мінімальної напруги на вході інвертора, прийнявши спадання напруги на фільтрі 5%: 2)...
-
Системи автоматичного регулювання, приклад - Системи автоматичного управління
Система автоматичного регулювання (САР) -- така система автоматичного керування(САК), задача якої полягає у підтримці вихідної величини об'єкта Х на...
-
Самовирівнювання ( Саморегулювання ) -- у системах автоматичного регулювання -- властивість об'єкта керування самостійно, без участі керуючих пристроїв,...
-
Основні властивості об'єктів регулювання - Системи автоматичного управління
Об'єкт керування (регулювання) -- це окрема машина, апарат, пристрій, технологічний процес або сукупність технічних засобів (машин, апаратів, пристроїв),...
-
Регулятори прямої дії та регулятори непрямої дії, приклад - Системи автоматичного управління
РЕГУЛЯТОР ПРЯМОГО ДІЇ - регулятор в якому регулюючий вплив з чуттєвого елемента передається далі безпосередньо на регулюючий (виконавчий) орган об'єкта...
-
Зовнішня швидкісна характеристика двигуна - це сукупність залежностей потужності, крутного моменту та питомої витрати палива від частоти обертання...
-
Що таке АСР? - Системи автоматичного управління
Автоматизована система розрахунків (АСР) - це програмно-апаратний комплекс, призначений для : - Реєстрації та обліку абонентів мереж електрозв'язку, що...
-
Пропорціонально-інтегральний (ПІ) закон регулювання. Регулятори, які працюють за даним законом, виконують переміщення регулюючого органу пропорційно сумі...
-
Призначення механізмів керування: А) рульове керування призначене для зміни напрямку руху автомобіля за допомогою повороту його предніх (керованих)...
-
Що таке навантаження і ємність, фізичний зміст, приклад - Системи автоматичного управління
Навантаження (також -- навантага)- кількість (маса, об'єм, обсяг) оброблювального матеріалу, який надходить на апарат або транспортний пристрій за...
-
Для визначення положення використовуются абсолютні датчики положення, які видають код кута обертання і не потребуют визначення початкового значення...
-
Передавальне перехідне запізнювання - Системи автоматичного управління
Передавальне перехідне запізнювання являє собою затримку у зміні регульованого параметра під час роботи пристрою, внаслідок того, що рух тепла чи іншого...
-
Розробка кар'єру Видобування глинистої сировини починається зі поверхневих робіт, які проводяться бульдозером Д 3-27С. Розмір відвала: висота - 1200 мм.,...
-
Двигун СМД-62 являється чотирьохтактним, шестициліндровим дизелем з безпосереднім впорскуванням палива в камеру згоряння, рідинного охолодження з...
-
Вступ - Розрахунок автоматизованої системи управління температурою в тунельній печі
У даному курсовому проекті необхідно розробити автоматизовану систему контролю технологічного процесу на сучасних цегляних заводах. На цегляному заводі...
-
Випередження упорскування палива повинне змінюватися відповідно до зміни режиму роботи двигуна. З цією метою паливний насос високого тиску оснащують...
-
Кінематична схема приводу Вихідні дані для проектування приводу: 1) Потужність на виході приводу Р= 6,6 кВт; 2) Частота обертання ведучого валу конвеєра...
-
Розрахунок кінематики і динаміки двигуна - Розрахунок та ремонт двигуна ВАЗ 2106
Вибір л і довжини LШ шатуна. З метою зменшення висоти двигуна без значного збільшення інерційних і нормальних сил відношення радіуса кривошипа до довжини...
-
Динамічна характеристика автомобіля є графічним зображенням залежності динамічного фактора D автомобіля від швидкості його руху на всіх передачах при...
-
W-CDMA в системах третього покоління - Дослідження мереж передачі даних на базі технології W-CDMA
Аналогові стільникові системи зазвичай називаються системами першого покоління. Цифрові системи, що знаходяться у використанні в даний час, такі як GSM,...
Розрахунок системи керування - Експлуатація і дослідження системи автоматичного управління стерновим електрогідравлічним приводом