РОЗРАХУНОК ІНТЕГРАЛЬНОЇ КВАДРАТИЧНОЇ ОЦІНКИ ЯКОСТІ СИСТЕМИ ТА ВИЗНАЧЕННЯ ОПТИМАЛЬНОГО КОЕФІЦІЄНТА ПІДСИЛЕННЯ РЕГУЛЯТОРА - Аналіз системи автоматичного регулювання температури в печі
Запишемо передаточну функцію замкнутої системи:

Знайдемо зображення динамічної похибки замкнутої системи:

Випишемо коефіцієнти чисельника і знаменника виразу динамічної похибки:
За допомогою знайдених коефіцієнтів обчислимо квадратичну оцінку якості:






Знайдемо оптимальне значення коефіцієнта підсилення kп, прийнявши його за невідомий. Тоді передаточна функція замкнутої системи матиме вигляд:

Зображення динамічної похибки при цьому матиме вигляд:

Випишемо коефіцієнти чисельника і знаменника виразу динамічної похибки:
За допомогою знайдених коефіцієнтів обчислимо квадратичну оцінку якості:










Визначимо частинну похідну скориставшись програмою Matlab:
>> Y=[0.008430376 0.1141719 0.262095233 0.166492228 0 0];
>> T=[-0.0004731 0.041969 0.296114 0.810856 1.10212 0.746845 0.202149];
>> [p, r]=polyder(Y, T);
Де p - чисельник виразу частинної похідної, r - знаменник виразу частинної похідної
Прирівняємо чисельник до нуля і знайдемо корені
>>roots(p)
Ans =
0
-38.2433
14.0578
5.1968
-1.4541 + 0.0782i
-1.4541 - 0.0782i
-1.3069 + 0.1195i
-1.3069 - 0.1195i
-1.3495
-1.2257
Отже оптимальні значення коефіцієнта передачі регулятора
Kп1=5.1968,
Kп2=14.0578.
Для цих значень шляхом моделювання в Маtlab Simulink побудуємо перехідні характеристики (рисунок 8.1, 8.2)
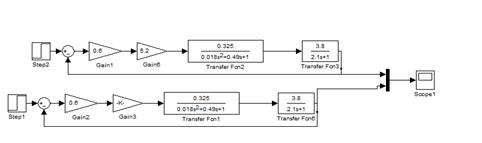
Рисунок 8.1 - Simulink - модель САР температури
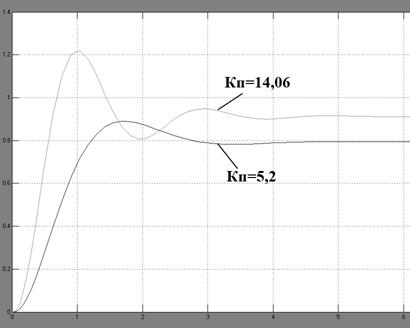
Рисунок 8.2 - Перехідні характеристики при різних значеннях коефіцієнтів передачі
Як бачимо перехідний процес в САР при kп1=5.2 має менше перерегулювання та час перехідного процесу, але при цьому в системі наявна мала усталена похибка. При kп2=14.06 спостерігається коливний характер перехідного процесу та значне перерегулювання при великій усталеній похибці. Вибираємо коефіцієнт передачі kп1=5.2.
Похожие статьи
-
При розробці і настроюванні систем автоматичного керування важливо встановити вплив окремих параметрів на їх стійкість. Для визначення областей...
-
Для побудови годографа АФЧХ спочатку запишемо передаточну функцію розімкненої системи : Виконавши заміну p=jщ, отримаємо: Для побудови годографа в...
-
Імітаційне моделювання Іншою комп'ютерною програмою, що дозволяє змоделювати перехідний процес в системі автоматичного регулювання, є система MATLAB, а...
-
Аналітичні методи побудови перехідних характеристик грунтуються на розв'язку диференціального рівняння системи. Для цього може бути використаний як...
-
У випадку, коли задано диференціальне рівняння елемента системи, його передаточна функція визначається на основі перетворення Лапласа. Для цього вихідне...
-
Деякі показники якості системи автоматичного регулювання температури в печі не задовольняють вимоги, що висуваються до якості регулювання такого роду...
-
Рисунок 3.1 - Структурна схема системи автоматичного регулювання температури в печі Для знаходження передаточних функцій системи за каналами задаючої і...
-
ВИСНОВОК - Аналіз системи автоматичного регулювання температури в печі
В ході виконання курсової роботи провели Аналіз системи автоматичного регулювання температури в печі: виходячи з рівнянь, що описують динаміку системи та...
-
ПРИНЦИП РОБОТИ СИСТЕМИ - Аналіз системи автоматичного регулювання температури в печі
Об'єкт регулювання представляє собою піч, у якій подане паливо спалюється й утворюється пропорційна масі палива кількість теплоти, що спричиняє...
-
Пропорціонально-інтегральний (ПІ) закон регулювання. Регулятори, які працюють за даним законом, виконують переміщення регулюючого органу пропорційно сумі...
-
ВСТУП - Аналіз системи автоматичного регулювання температури в печі
Мета курсової роботи - набуття студентами навичок у розрахунку лінійних систем автоматичного управління(САУ), нелінійних САУ та САУ з цифровою корегуючою...
-
Системи автоматичного регулювання, приклад - Системи автоматичного управління
Система автоматичного регулювання (САР) -- така система автоматичного керування(САК), задача якої полягає у підтримці вихідної величини об'єкта Х на...
-
Визначення необхідного коефіцієнта підсилення антени - Розразунок рупорно-параболічної антени
Раніше було отримано, що: Робочий діапазон частот визначимо, як: , саме ці частоти були обрані як граничні, оскільки ширина смуги спектра стосовно...
-
Розрахунок проводиться з урахуванням наступних основних вимог: А) напруга UН І номінальний струм IНАпаратури повинні відповідати напрузі і тривалому...
-
Визначення і коригування періодичності і трудомісткості ТО і Р рухомого складу Вибір коефіцієнтів коригування Нормативи періодичності ТО, пробігу до КР,...
-
Системи автоматичного управління, призначення, приклад - Системи автоматичного управління
Система автоматичного управління (САУ) підтримує або поліпшує функціонування керованого об'єкта. У ряді випадків допоміжні для САУ операції (пуск,...
-
Визначення структури і складу системи керування робиться за допомогою конфігуратора HW Config , який є складовою частиною язика програмування. Він...
-
Для відкритих трас множник послаблення може бути розрахований за наступною формулою: - модуль коефіцієнта відбиття, величина якого залежить від характеру...
-
Передаточна функція системи по задаючій дії
Данні до курсового проекту: На рис.1 представлена вихідна схема курсового проекту: Рис.1 Вихідна схема курсового проекту. 1)Передаточна функція системи...
-
Випалювання цегли. - Розрахунок автоматизованої системи управління температурою в тунельній печі
Випалювання цеглини проводиться в тунельній печі з плоским зведенням і верхнім розташуванням пальників. Таблиця 4. Технічна характеристика тунельної...
-
Висушена цеглина з сушильної камери 10-поличним візком і лафетом переміщається і встановлюється на стелаж-елеватор автомата-садника. Автомат-садник...
-
Самовирівнювання ( Саморегулювання ) -- у системах автоматичного регулювання -- властивість об'єкта керування самостійно, без участі керуючих пристроїв,...
-
Розробка кар'єру Видобування глинистої сировини починається зі поверхневих робіт, які проводяться бульдозером Д 3-27С. Розмір відвала: висота - 1200 мм.,...
-
Вступ - Автоматичний регулятор температури
Метою даної роботи є розробка приладу, призначеного для автоматичного регулювання температури. Головна особливість терморегуляторів - простота схем при...
-
Визначаємо імовірність того, що навантажувально-розвантажувальний засіб буде простоювати в очікуванні прибуття автомобілів: , Визначаємо середню...
-
Визначення структури інформаційної системи - Технологія проектування інформаційних систем
Основу системної побудови інформаційної системи становить її структура, яка має бути досить повною. Засобами структуризації є процедури декомпозиції...
-
Розрахуємо та побудуємо принципову схему СР. Всі компоненти схеми мають напругу живлення 5 В. Максимальний сумарний струм всіх елементів не перевищує 200...
-
Опис вибору елементної бази та роботи принципової схеми - Автоматичний регулятор температури
Схема терморегулятора показана на рис.7 (Додаток В). Резистором R8 встановлюють необхідну контрастність зображення індикатора. Всі блоки пристрою...
-
Розробка алгоритму роботи пристрою - Автоматичний регулятор температури
Після пуску та ініціалізації регістрів мікроконтролера виконується найтриваліша ініціалізація РК-дисплея. Далі перевіряється стан прапора установки. Якщо...
-
Розрахунок допусків ведемо для одного з основних компонентів спеціального елементу - кварцового резонатора. Рівнянням похибки заданого параметру ЕА у...
-
Вступ - Створення автоматичної системи розпізнавання автомобілів при їх в'їзді на парковку
У наш час індивідуальні, сімейні транспортні засоби вже заполонили всі дороги, двори, навіть тротуари. Особливо це актуально у великих містах, де дуже...
-
Всі знають, що таке кут випередження запалювання. Цей параметр роботи системи необхідно налаштовувати час від часу на будь-якому автомобілі, оснащеному...
-
Аналіз радіорелейних станцій що знаходяться на озброєнні у ЗСУ - Засоби радіорелейного зв'язку
Перспективними напрямками діяльності Збройних Сил України в розвитку зв'язку є розробка і впровадження в виробництво сучасних цифрових станцій...
-
Динамічна характеристика автомобіля є графічним зображенням залежності динамічного фактора D автомобіля від швидкості його руху на всіх передачах при...
-
РОЗРАХУНОК ВХІДНИХ ТА ВИХІДНИХ ХАРАКТЕРИСТИК ВУЗЛІВ СТРУКТУРНОЇ СХЕМИ - Цифровий вимірювач ваги
Для визначення характеристик цифрового вимірювача ваги необхідно визначити значення вихідної напруги первинного перетворювача при мінімальному значення...
-
Для одержання тимчасових розгорнень процесів, швидкість яких перевищує тимчасові можливості звичайної фотографічної техніки і телевізійних засобів...
-
Визначення необхідної кількості постів обслуговування Навантажувально-розвантажувальні роботи проводяться ручним способом. Визначаємо кількість постів...
-
На цегляному заводі застосовується технологія пластичного формування, по якій виготовляють цеглу згідно ГОСТ 530-95. Як АСР я вибрав систему регулювання...
-
Основні властивості об'єктів регулювання - Системи автоматичного управління
Об'єкт керування (регулювання) -- це окрема машина, апарат, пристрій, технологічний процес або сукупність технічних засобів (машин, апаратів, пристроїв),...
-
Вступ - Розрахунок автоматизованої системи управління температурою в тунельній печі
У даному курсовому проекті необхідно розробити автоматизовану систему контролю технологічного процесу на сучасних цегляних заводах. На цегляному заводі...
РОЗРАХУНОК ІНТЕГРАЛЬНОЇ КВАДРАТИЧНОЇ ОЦІНКИ ЯКОСТІ СИСТЕМИ ТА ВИЗНАЧЕННЯ ОПТИМАЛЬНОГО КОЕФІЦІЄНТА ПІДСИЛЕННЯ РЕГУЛЯТОРА - Аналіз системи автоматичного регулювання температури в печі