Типовая, оптимизированная по модульному оптимуму, передаточная функция разомкнутой системы имеет вид:
- эквивалентная некомпенсируемая постоянная времени контура скорости.
Где - коэффициент усиления регулятора скорости.
Регулятор скорости является пропорционально-интегральным (ПИ - регулятор).
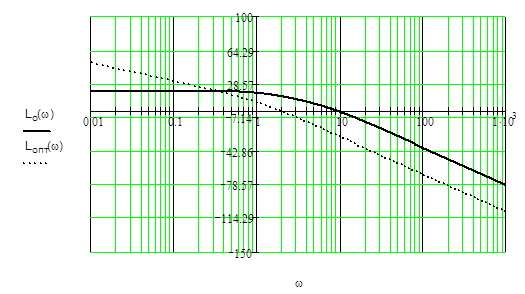
По передаточным функциям (2.1) и (2.4) записываются выражения для ЛАЧХ оптимизированного контура скорости и объекта
На основании выражений (2.8) и (2.9) строятся располагаемая и желаемая ЛАЧХ, которые представлены на рисунке 2.1.
Располагаемую и желаемую ЛАЧХ строим по асимптотам, согласно [2, с. 84 - 88].
Располагаемая и желаемая ЛАЧХ представлены на рисунке 2.1.
-
Синтез ЛАЧХ регулятора скорости и определение его коэффициента усиления, Определим величину подъема ЛАЧХ регулятора скорости: - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Согласно (2.6) передаточная функция регулятора скорости имеет вид: ,(2.14) Где ; - коэффициент усиления регулятора скорости. (2.15) ЛАЧХ корректирующего...
-
ВВЕДЕНИЕ, АНАЛИЗ КАЧЕСТВА РЕГУЛИРОВАНИЯ В ИСХОДНОЙ СИСТЕМЕ С ПРОПОРЦИОНАЛЬНЫМ РЕГУЛЯТОРОМ СКОРОСТИ ПРИ, Составление по принципиальной схеме структурных схем в динамике и статике - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Расчет и построение амплитудно-частотной характеристики (АЧХ) замкнутой системы, Расчет и построение логарифмических амплитудно - и фазо - частот-ных характеристик (ЛАЧХ и ЛФЧХ) - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Для построения АЧХ выпишем передаточную функцию замкнутой системы по задающему Найдем комплексную передаточную функцию замкнутой системы: Выражение для...
-
Схемная реализация регуляторов скорости и расчет его параметров - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
На структурной схеме системы электропривода регулятор скорости с передаточной функцией (2.6) выглядит следующим образом (рисунок 2.3): Uз U UAR - UR...
-
Расчет подчиненного регулирования скорости двигателя постоянного тока
Цель и задачи расчетно-графической работы. В соответствии с кинематической схемой исполнительного механизма (рис. 1) и заданным вариантом требуется: 1)...
-
Определение показателей качества регулирования оптимизированной системы по переходным характеристикам - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Определим основные показатели качества регулирования оптимизированной системы по переходной характеристике по задающему воздействию, имеющей...
-
Расчет и построение переходных характеристик по задающему и возмущающему воздействию, Расчет по структурной схеме в статике и построение электромеханической характеристики в замкнутой системы электропривода - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Переходную характеристику по задающему воздействию строят на основании ее передаточной функции Данная характеристика представлена на рисунке 1.12...
-
Составление принципиальной и структурной схем систем электропривода синтезированным регулятором скорости, Расчет переходных характеристик оптимизированной системы электропривода - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
На рисунке 2.7 представлена принципиальная схема системы электропривода, а также на рисунке 2.8 его структурная схема. Рисунок 2.7- Принципиальная схема...
-
Определение показателей качества регулирования - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Время регулирования Переходная характеристика по задающему воздействию (рис. 1.12): . (1.71) Переходная характеристика по возмущающему воздействию (рис....
-
Определение передаточных функций системы по задающему и возмущающему воздействиям, а также передаточной функции разомкнутой системы, Анализ устойчивости, Определение критического коэффициента усиления разомкнутой системы по методу D-разбиения. - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Передаточную функцию системы по задающему воздействию - главную передаточную функцию получаем следующим образом: Передаточная функция системы по...
-
Расчет коэффициентов передачи и постоянных времени - Расчет и исследование системы стабилизации скорости вращения электродвигателя постоянного тока
Номинальная ЭДС генератора рассчитывается по формуле: (В), Где 1,32 - коэффициент приведения сопротивлений обмоток генератора к температуре 750С. -...
-
РАСЧЕТ И ПОСТРОЕНИЕ ЕСТЕСТВЕННЫХ МЕХАНИЧЕСКИХ И ЭЛЕКТРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ, Сопротивление якоря горячее., Коэффициент полезного действия при номинальной нагрузке., Коэффициент ЭДС двигателя., Номинальный момент на валу двигателя., Электромагнитный момент, соответствующий номинальному току., Момент трения на валу электродвигателя., Скорость идеального холостого хода., Скорость вращения по ступеням., Момент статический по ступеням для реактивной нагрузки., I и III квадранты работы(двигательный режим)моменты ступени определяются по выражению:, Расчет естественных электромеханической щ=f(I) и механической щ=f(М) характеристик двигателя (рисунок 3). - Электрический привод производственного механизма
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, Расчет контура тока - Электропривод и автоматизация главного привода специального вальцето-карного станкамодели IK 825 Ф2
Для обеспечения требуемых статических и динамических параметров определим требуемую структуру системы. Поскольку необходимо регулировать мощность...
-
Частотные характеристики исходной разомкнутой динамической системы, АЧХ и ФЧХ функциональных элементов системы, Частотные характеристики динамической системы в логарифмическом масштабе, ЛАЧХ и ЛФЧХ динамической системы в логарифмическом масштабе - Автоматическая система регулирования температуры сушильного шкафа
АЧХ и ФЧХ функциональных элементов системы Амплитудная частотная характеристика (АЧХ) и фазовая частотная характеристика (ФЧХ) находятся по следующим...
-
Фазо-частотная характеристика, Амплитудно-фазовая характеристика, ЛАЧХ и ЛФЧХ по каналу управления - Цифровая система автоматического регулирования температуры воды в баке
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Расчет контура скорости - Электропривод и автоматизация главного привода специального вальцето-карного станкамодели IK 825 Ф2
Структурная схема контура скорости приведена на Рис. 5.4. Регулятор скорости организован по пропорциональному (П) закону управления с настройкой на...
-
Электрический привод производственного механизма, Данные для построения:, Построение тахограммы и нагрузочной диаграммы производственного механизма., РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ И ВЫБОР ЕГО ПО КАТАЛОГУ. ОПРЕДЕЛЕНИЕ НАИВЫГОДНЕЙШЕГО ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ РЕДУКТОРА, Продолжительность включения., Диапазон регулирования., Среднеквадратичное значение мощности за время работы на основании тахограммы и нагрузочной диаграмм., Значения угловых скоростей по ступеням:, Мощность на i-м участке работы:, Коэффициент ухудшения теплоотдачи по ступеням., Для первого участка:, Для второго участка:, Пересчет среднеквадратичной мощности двигателя на выбранное стандартное значение ПВ=40%., Расчетная мощность электрического двигателя., Выбираем двигатель постоянного тока независимого возбуждения типа Д-31, имеющий следующие паспортные данные (таблица 1)., Передаточное отношение редуктора. - Электрический привод производственного механизма
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Анализ разомкнутой исходной САР, Исследование временных характеристик - Цифровая система автоматического регулирования температуры воды в баке
Исследование временных характеристик Для того, чтобы исследовать динамические свойства системы, рассмотрим временные и частотные характеристики системы....
-
Анализ исходной замкнутой системы, Основные передаточные функции исходной САР, Исследование устойчивости САР алгебраическим путем. Расчет критического коэффициента передачи, Передаточная функция замкнутой системы по каналу "возмущение - выход", Передаточная функция замкнутой системы по ошибке по каналу управления, Передаточная функция замкнутой системы по ошибке каналу возмущения - Цифровая система автоматического регулирования температуры воды в баке
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Построение временных характеристик разомкнутой системы, Весовые и переходные функции отдельных элементов, Весовые и переходные функции динамической системы, По каналу управления:, По каналу возмущения: - Автоматическая система регулирования температуры сушильного шкафа
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Определение запасов устойчивости, Исследование точности в установившемся режиме, Определение качества переходного процесса (оценка ВЧХ) - Автоматическая система регулирования температуры сушильного шкафа
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Исследование точности системы с типовыми регуляторами в установившемся режиме - Цифровая система автоматического регулирования температуры воды в баке
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Исследование одноконтурной системы автоматического регулирования на основе практических методик ее настройки
Исследование одноконтурной САР на основе практических методик ее настройки Цель работы: освоение практических методик идентификации объектов управления и...
-
Расчет и выбор регулятора - Модернизация системы регулирования температурных параметров на агрегате электролитического лужения АЭЛ-1200/III "АрселорМиттал Темиртау"
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции, Расчет показателей качества управления замкнутой САР с ПИ-регулятором, Построение переходной функции замкнутой САР с ПИД - регулятором по ее передаточной функции, Расчет показателей качества управления замкнутой САР с ПИД - регулятором - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Для построения в MathCad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточну функцию замкнутой...
-
Выбор закона регулирования и типа регулятора, Расчеты параметров настройки ПИ - регулятора с учетом типового процесса регулирования, Расчеты параметров настройки ПИД - регулятора с учетом типового процесса регулирования - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед...
-
Анализ исходной АСР напряжения генератора постоянного тока, Уравнения состояния и основные передаточные функции замкнутой системы, Исследование устойчивости., Критерий Гурвица, Критерий Найквиста и определение запасов устойчивости - Автоматическая система регулирования температуры сушильного шкафа
Уравнения состояния и основные передаточные функции замкнутой системы В данной работе рассматривается АСР, управление в которой организованно по принципу...
-
Регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором - Пуск трехфазных асинхронных двигателей и регулирование их скорости вращения
Скорость вращения ротора асинхронного двигателя (28-3) Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно...
-
Исследование качества системы с типовыми регуляторами в переходном процессе - Цифровая система автоматического регулирования температуры воды в баке
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Исследование частотных характеристик разомкнутой системы, Амплитудно-частотная характеристика - Цифровая система автоматического регулирования температуры воды в баке
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
Регулирование скорости вентиляторов - Разработка автоматизированной системы управления промышленной холодильной установкой
Когда используются аналоговые выходы, может регулироваться скорость вентиляторов, например, при помощи преобразователя частоты типа AKD. Общее...
-
Выбор параметров регулирования - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров
Для составления математической модели объекта проведем анализ всех составных элементов структурной схемы и рассчитаем параметры их передаточных функций....
-
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ конвейерной линией, Составление структурной схемы - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Основные динамические звенья САУ и их частотные характеристики - Анализ системы автоматического управления
1) Усилительное звено (безынерциальное). В усилительном звене выходная величина в каждый момент времени пропорциональна входной величине. Примерами...
-
Синтез разомкнутой САР с ПИ-регулятором, Синтез разомкнутой САР с ПИД - регулятором, Оценка устойчивости САР, Запас устойчивости по амплитуде и по фазе системы с ПИ-регулятором, Запас устойчивости по амплитуде и фазе системы с ПИД - регулятором - Синтез АСР уровня моющего вещества в емкости для промывки изделий
Для определения устойчивости замкнутой системы с ПИ-регулятором согласного критерию Найквиста записывают передаточную функцию разомкнутой системы...
-
КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМА, Определение скоростей методом построения планов скоростей - Проектирование и исследование механизмов 2-х цилиндрового V-го ДВС
ЦЕЛЬ. Найти скорости и ускорения центров масс и угловые скорости, и угловые ускорения звеньев механизма. Определение скоростей методом построения планов...
-
Схема замещения, Расчет рабочих характеристик, Проверка возможности работы двигателя под нагрузкой - Проектирование электромеханической системы, используемой для привода управления ориентацией панелями солнечных батарей
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Исследование устойчивости САР косвенными методами с использованием частотных методов. Определение предельного коэффициента передачи и запаса устойчивости - Цифровая система автоматического регулирования температуры воды в баке
Рассмотрим ЛАЧХ и ЛФЧХ системы (рисунок 18): Рисунок 21 - ЛАЧХ и ЛФЧХ разомкнутой системы по каналу управления Исследуемая система устойчива, если ее...
-
Кинематический и силовой расчеты привода, Подбор электродвигателя, Разбивка передаточного отношения привода, Определение частоты вращения приводного вала, Определение общего передаточного числа, Разбивка передаточного числа, Определение кинематических и силовых параметров на валах привода - Привод ленточного конвейера с одноступенчатым червячным редуктором и открытой ременной передачей
Усилие на конвейере FT = 5,25 кН Скорость = 0,3 м/с Подбор электродвигателя Двигатель является одним из основных элементов машинного агрегата. От типа...
-
Формализация содержательного описания системы, Обоснование способа описания исходной АСР, Структурная схема АСР напряжения генератора постоянного тока - Автоматическая система регулирования температуры сушильного шкафа
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...