МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ конвейерной линией, Составление структурной схемы - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров
Составление структурной схемы
Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие чего пенополиуретан не выходит за его пределы. Из этого следует что ППУ заполнив площадь транспортера начинает "рости" вверх. В результате этого получаем что высота блока пенополиуретана характеризуется производительностью сопла подачи смеси и скоростью транспортера. Так же нужно учесть, что смесь под действием химической реакции увеличивается в объеме. Скорость конвейера регулируется асинхронным двигателем который в свою очередь питается от частотного преобразователя.
Структурная схема управления конвейером в системе представлена на рисунке 2.1.
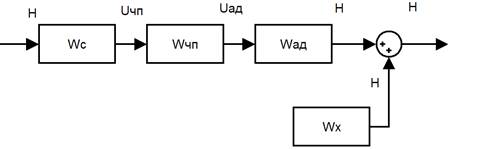
Рисунок 2.1 - Структурная схема управления конвейером
Структурная схема управления конвейером включает в себя следующие элементы:
- - WЧП - передаточная функция частотного преобразователя, выходным сигналом которого является напряжение UАД; - WАД - передаточная функция асинхронного электродвигателя, выходным сигналом которого является высота блока пены H; - WС - передаточная функция сопла подачи смеси, выходным сигналом которого является напряжение UЧП; - WХ - передаточная функция химической реакции, выходным сигналом которого является высота блока пены H.
Похожие статьи
-
Для составления математической модели объекта проведем анализ всех составных элементов структурной схемы и рассчитаем параметры их передаточных функций....
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Датчик Скорости MD-256 изображенный на рисунке 4.4 предназначен для работы с конвейерами. Рисунок 4.4 - Датчик Скорости MD-256 Он передает сигнал на...
-
Для реализации системы требуется следующее оборудование: частотный преобразователь, промышленный контроллер, ультразвуковой датчик уровня, датчик...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Запуск системы производства поролона производится по команде оператора после того, как им были введены параметры протекания процесса. Перед запуском...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
Годовые амортизационные отчисления рассчитываются по формуле: Aатк = аатк(1+kтм2)Сктс, (6.9) Где, аатк - коэффициент амортизационных отчислений; Kтм2 =...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
SIMATIC S7-300 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Данный...
-
Производительность поролона автоматизированной системы управления составляет 400 м3/час. Количество рабочих часов в году равно 2000 ч. В системе...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Класс в Rational Rose -- это описание общей структуры (данных и связей) для дальнейшего создания объектов. Для того чтобы генератор Rational Rose имел...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Анализ условий труда Анализ условий труда на участке производства поролона, приводит к заключению о потенциальной опасности данного участка. Суть...
-
- годовые затраты на ремонтные работы КТС, равны 15% от годовых амортизационных отчислений: СР=0,15 ААТК=0,1535233=5284,95 руб. (6.11) Расчет годовых...
-
Пожары на конвейерных линиях представляют большую опасность для работающих и могут причинить огромный материальный ущерб. К основным причинам пожаров,...
-
Pointek ULS 200 - это бесконтактный ультразвуковой сигнализатор уровня с двумя точками переключения для регистрации уровня сыпучих веществ, жидкостей и...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
На рисунке 2.7 представлена принципиальная схема системы электропривода, а также на рисунке 2.8 его структурная схема. Рисунок 2.7- Принципиальная схема...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Структурная схема После обоснования выбора структурной схемы устройства останавливаемся на схеме с одним дешифратором. Структурная схема приведена на...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления. Под структурой управления понимается...
-
Описание функциональной схемы Рис 1. САР температуры сушильного шкафа Данная САР предназначена для управления температурой сушильного шкафа. Значит,...
-
Когда используются аналоговые выходы, может регулироваться скорость вентиляторов, например, при помощи преобразователя частоты типа AKD. Общее...
-
Структура системы управления организацией Структура системы управления организацией - упорядоченная совокупность взаимосвязанных элементов, находящихся...
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Функциональные задачи Cистема электроприводов должна обеспечивать повороты правого и левого крыльев солнечных батарей по крену, а также иметь оговоренные...
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ конвейерной линией, Составление структурной схемы - Проектирование автоматизированной системы управления технологическим процессом производства простых полиэфиров