Схема замещения, Расчет рабочих характеристик, Проверка возможности работы двигателя под нагрузкой - Проектирование электромеханической системы, используемой для привода управления ориентацией панелями солнечных батарей
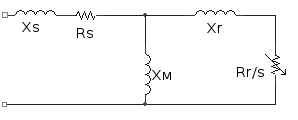
Рис. 3.3. Схема замещения фазы асинхронного двигателя
Полное сопротивление разветвления: ZR'(S) = RR'(S) + j*XR'(S).
Полное сопротивление обмотки статора: ZS = RS + j*XS = 4,188+j*0,094 (Ом)
Полное сопротивление фазы: Z1(S) = ZS + ZR'(S).
Расчет рабочих характеристик
Выражения для рабочих характеристик будут записаны как функции скольжения и графически построены с помощью программного комплекса Mathcad.
Фазный ток статора: IA(S)=Uн/Z1(S)
Сопротивление ротора: ZRa(S) = RR/s + j*XR.
Ток ротора:
E(S) =IA(S)-ZR'(S)
Добавочный ток, учитывающий потери в стали статора:
IAc(S)=PCs/(M-E(S)).
Потери в меди статора: PMs(S)=M-(IA(S)+IAc(S))2-RS.
Активная мощность: P1(S)=Re(3-UН-IA(S)).
Электромагнитная мощность: PEm(S)=P1(S)-PCs-PMs(S).
Потери в обмотке ротора: PMr(S)=PEm(S)-S.
Мощность на валу двигателя:
P2(S)=PEm(S)-PMr(S)-PCr(S)-PМех-PДоб.
КПД:
H(S)=P2(S)/P1(S).
Коэффициент мощности: cosf(S)=P1(S)/|3-UН-IA(S)|.
Синхронная частота вращения: W0=2-p-f/p=471,239 @04/A.
Проверка возможности работы двигателя под нагрузкой
Для проверки правильности расчета двигателя необходимо сравнить полученные момент и скорость вращения с требуемыми по техническому заданию. Требуемая скорость вращения выходного вала W2KE = (8,7±0,87)-10_2 рад/с; момент на выходном валу блока: MВых = 11,7..90 Н-м.
Передаточное число редуктора: I = W0*(1-SН)/W2KE = 454,74/0,087 = 5227.
Момент на валу двигателя: M = MВых/I = (2,3..17,2)-10-3 Н-м.
Полученные значения обозначены пунктиром на рис.
Максимальное отклонение выходной скорости вращения от заданной:
DWMax = (470,8-454,74)/I = 3,1-10-3 (рад/с),
То есть лежит в пределах заданного диапазона.
В данной главе был произведен расчет трехфазного асинхронного двигателя с короткозамкнутым ротором. Результатом расчета двигателя стало построение следующих характеристик: P2(s), cosj(P2), h(P2), I1(P2), M(P2), W(P2), W(M) (см. Приложение 3). Проанализировав данные характеристики можно сделать вывод, что спроектированный двигатель удовлетворяет всем требованиям, как по энергетическим показателям, так и по пусковым характеристикам. Для применения в рассматриваемой системе электропривода рекомендуется трехступенчатый планетарный редуктор, который позволяет реализовать передаточное отношение одного звена IЗв=15..20 при минимальных габаритах и массе.
Необходимо отметить, что при проектировании были учтены конструктивные особенности, обусловленные спецификой применения данного электропривода.
Похожие статьи
-
Потери в стали статора Масса ярма статора: G As =7800- H As - L - K C-р- D A - H As =0,139 кг. Удельные потери в стали 1521 при B =1 Тл и F =400 Гц: P...
-
Рассматриваемая ЭМС и ЭМС-аналог содержат асинхронный и шаговый (ШД) электродвигатели соответственно. Каждый из типов электродвигателей имеет свои...
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
Активное сопротивление обмотки статора Для четырехполюсной машины с неизолированными лобовыми частями: K 1=1,25; B =1 мм. Зубцовое деление, отнесенное к...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
В качестве аналога рассматриваемой электромеханической системы (ЭМС) целесообразно рассмотреть ЭМС блока Р16К на базе шагового двигателя с постоянным...
-
В данной работе была рассмотрена и спроектирована система электропривода солнечной батареи по крену для малого космического аппарата, включающая в себя...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Плотность тока в проводниках обмотки статора принимаем Д S =5 А/мм2. Необходимое сечение проводника: S S = I Нф/D S = 0,394/5 = 0,07879 (мм2). Выбираем...
-
Конструируя ЭМС, стремятся достигнуть идеала. Идеальная электрическая машина должна иметь определенные свойства (высокий КПД, надежность, малые размеры и...
-
Магнитное напряжение воздушного зазора: F Д=0,8-106- K Д- B Д-д=63,66 А. Магнитное напряжение зубцов статора. Выбираем электротехническую сталь марки...
-
Функциональные задачи Cистема электроприводов должна обеспечивать повороты правого и левого крыльев солнечных батарей по крену, а также иметь оговоренные...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
-
В последнее время наметился спрос на малые космические аппараты (МКА), которые могут выполнять различные задачи, как военного, так и мирного назначения....
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Делаем пересчет механических характеристик двигателя для полученных значений сопротивлений. Полученные значения заносим в таблицу 5. RД. ст1'=3,43 Ом,...
-
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют...
-
Схема замещения асинхронного двигателя - Асинхронный двигатель
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и...
-
Построение внешней скоростной характеристики двигателя - Тяговый расчет Урала 4320
Автомобиль движется под воздействием на него сил и моментов, которые разделяют на движущие и оказывающие сопротивление движению. Основной движущей силой...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Скорость вращения ротора асинхронного двигателя (28-3) Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно...
-
Устройство шаговых двигателей Двигатели с переменным магнитным сопротивлением [стр. 4, 2] Шаговые двигатели с переменным сопротивлением имеют несколько...
-
Механическая характеристика асинхронного двигателя - Асинхронный двигатель
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при...
-
Способы управления шаговым двигателем - Разработка стенда управления шаговым двигателем
Волновая и фазовая коммутация фаз Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена...
-
Ток якоря двигателя определяется формулой (29.2). Если принять U и неизменными, то ток Iа зависит от противо-ЭДС Еа. Наибольшего значения ток Iа...
-
Спроектировать привод к цепному конвейеру. Мощность на ведомом колесе зубчатой передачи Р= 9,5 кВт и угловая скорость вращения этого колеса Щ 3 = 1,9р...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Номинальные данные - Компрессор, подбор электродвигателя
Режим работы, для которого электрическая машина предназначена предприятием-изготовителем, называется номинальным. Номинальные данные электрической...
-
Описание работы электросхемы моста - Электрооборудование мостового крана
Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения силового контроллера или...
-
Пуск асинхронных двигателей - Асинхронный двигатель
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя....
-
Классификация шаговых двигателей - Разработка стенда управления шаговым двигателем
Биполярные и униполярные шаговые двигатели Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля...
-
Для отсутствия буксования необходимо, чтобы сила сцепления приводных колес с рельсом была больше тягового усилия на их ободе Где: коэффициент сцепления...
-
Усилие на конвейере FT = 5,25 кН Скорость = 0,3 м/с Подбор электродвигателя Двигатель является одним из основных элементов машинного агрегата. От типа...
-
Гидравлический расчет - Расчет кожухотрубного теплообменника для стерилизации масла
Гидравлический расчет выполняется для определения потерь давления и затрат энергии на преодоление этих потерь. 1. Общие потери давления определяются: ДС...
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
При реактивном характере нагрузки производственного механизма примем вид торможения - динамическое. Расчет механической характеристики при динамическом...
-
Данные по эксплуатационным характеристикам судна Среднее расстояние, проходимое судном за рейс, L: L ? 2309,00 миль - задано по условию. Годовая...
-
Составление расчетной схемы и исходного уравнения для расчета зажимного усилия Силовой расчет станочных приспособлений можно разбить на следующие этапы:...
-
Переходную характеристику по задающему воздействию строят на основании ее передаточной функции Данная характеристика представлена на рисунке 1.12...
Схема замещения, Расчет рабочих характеристик, Проверка возможности работы двигателя под нагрузкой - Проектирование электромеханической системы, используемой для привода управления ориентацией панелями солнечных батарей