Регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором - Пуск трехфазных асинхронных двигателей и регулирование их скорости вращения
Скорость вращения ротора асинхронного двигателя
(28-3)
Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно подразделить на два класса:
1) регулирование скорости вращения первичного магнитного поля
(28-4)
Что достигается либо регулированием первичной частоты f1, либо изменением числа пар полюсов р двигателя;
2) регулирование скольжения двигателя s при n1 = соnst.
В первом случае к. п. д. двигателя остается высоким, а во втором случае к. п. д. снижается тем больше, чем больше s, так как при этом мощность скольжения (см. § 24-5)
(28-5)
Теряется во вторичной цепи двигателя (мощность скольжения используется полезно только в каскадных установках).
Рассмотрим здесь главнейшие способы регулирования скорости вращения.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения, ионные или полупроводниковые преобразователи частоты и др.). Поэтому данный способ регулирования используется главным образом в случаях, когда для целых групп двигателей необходимо повышать (n > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме рис. 11-14 заменить явно-полюсный ротор па ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Напряжение регулируется с помощью выпрямителя.
Если пренебречь относительно-небольшим падением напряжения в первичной цепи асинхронного двигателя, то
(28-6)
Существенное изменение потока Ф при регулировании n нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при том же значении М. Поэтому в большинстве случаев целесообразно поддерживать Ф =const. При этом из соотношения (28-6) следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
(28-7)
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением n (например, приводы вентиляторов, когда Мст ~ ). В этом случае более быстрое уменьшение U по сравнению с f1 вызывает уменьшение Ф и улучшает энергетические показатели двигателя (и к. п. д.) и в то же время уменьшение Мт с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
Ф~
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Регулирование скорости изменением числа пар полюсов р используется обычно для двигателей с короткозамкнутым ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами: 1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р; 2) применением обмотки специального ' типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки. Предложено значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток невыгодно, так как при этом из-за ограниченного места в пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
Двигатели с изменением числа пар полюсов называются многоскоростными. Обычно они выпускаются на 2, 3 или 4 скорости вращения, причем двухскоростные двигатели изготовляются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении р2 : p1 == 2 : 1, трехскоростные двигатели - с двумя обмотками на статоре, из которых одна выполняется с переключением р2 : р1 = 2 : 1, четырехскоростные двигатели -- с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на f1 = 50 Гц с синхронными скоростями вращения 1500/1000/750/ /500 об/мин имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2p=6 и 12.
Многоскоростные двигатели применяются в металлорежущих и деревообрабатывающих станках, в грузовых и пассажирских лифтах, для приводов вентиляторов и насосов и в ряде других случаев.
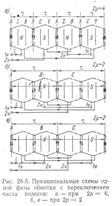
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2 : 1 (рис. 28-5) состоит из двух частей, или половин, с одинаковым количеством катушечных групп в каждой части. Когда обе части обмотки обтекаются токами одинакового направления, обмотка создает магнитное поле с большим числом полюсов (рис, 28-5, а, 2р = 4), а при изменеиии направления тока в одной части обмотки на обратное, число полюсов уменьшается вдвое (рис. 28-5, б и в, 2р =2). Подобные переключения производятся во всех фазах одновременно, и переключаемые части обмотки могут соединяться последовательно (рис. 28-5, а и б) или параллельно (рис. 28-5, в).
Ширина фазной зоны, занимаемой сторонами катушек катушечной группы, и шаг обмотки в зубцовых делениях одинаковы при обоих числах полюсов. Поскольку, однако, при переключении числа пар полюсов в отношении 2 : 1 полюсное деление изменяется в два раза, то величина фазной зоны в электрических градусах и относительный шаг обмотки при этом также изменяются в два раза.
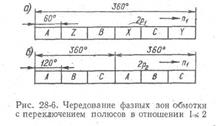
Переключаемую обмотку выполняют так, что при меньшем числе пар полюсов (р1) фазная зона б== 60° эл. Тогда при удвоенном числе пар полюсов (р2 =2р1) ширина этой зоны будет б = 120° эл.
Нормальные чередования фазных зон при одинаковом направлении вращения магнитного поля для обеих скоростей вращения должны быть такими, как показано на рис. 28-6. Из рисунка видно, что, кроме изменения направлений токов в зонах X, У, Z (рис. 28-6, а) на обратные (т. e. обращение их в зоны А, В, С), для сохранения направления вращения поля, а следовательно, и ротора при переключении числа пар полюсов (рис. 28-6, б) необходимо также переключить концы двух фаз обмотки (например, фазы В и С). Обмотка выполняется так, что ее шаг равен полному (180? эл,) при большем числе полюсов (2р2), так как кривая н. с. обмотки с зоной б = 120° наиболее близка к синусоидальной при полном шаге. Тогда при меньшем числе полюсов относительный шаг в= 0,5.
Из сказанного следует, что обмотка с переключением числа полюсов создает н. с. с большим значением бьющих гармоник поля,
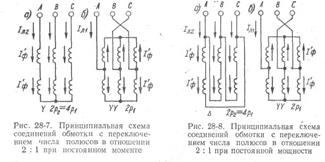
Чем нормальная трехфазная обмотка с б = 60° и в = 5/6. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными. На рис. 28-7 и 28-8 представлены наиболее часто употребляемые схемы обмоток с переключением числа пар полюсов в отношений p2: p1=2: 1. Определим мощности и моменты, развиваемые двигателями с такими схемами обмоток при неизменном линейном напряжении сети Uл1 наибольшем допустимом (номинальном) токе в полуфазе обмотки I?ф. Пренебрегая разницей в условиях охлаждения при изменении скорости, вращения, можно принять, что значение I?ф одинаково при обеих скоростях вращения. Приближенно можно считать, что коэффициенты мощности и к. п. д. при одинаковых значениях I?ф для обеих скоростей вращения также одинаковы.
При указанных условиях мощности на валу для схем рис. 28-7, а и б соответственно равны:

Таким образом,
И, следовательно, при переходе от меньшей скорости вращения (рис. 28-7, а) к большей (рис. 28-7, б) допустимая мощность на валу увеличивается в два раза. Момент вращения при этом, очевидно, остается постоянным, и поэтому схема переключения Y/YY (рис. 28-7) называется также схемой переключения с М =const. При схемах рис. 28-8, а и б имеем соответственно:

;

, откуда
= 1,15.
Обычно при использовании схемы рис. 28-8 для обеих скоростей вращения указывается одинаковая номинальная мощность, т. е. принимается, что Р1 == Р2. Схема переключения Д/YY (рис. 28-8) называется также схемой переключения с Р =const.
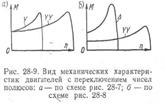
Вид механических характеристик двигателей со схемами обмоток рис. 28-7 и 28-8 изображен на рис. 28-9.
При переключении многоскоростной обмотки магнитные индукции на отдельных участках магнитной цепи в общем случае изменяются, что необходимо иметь в виду при проектировании двигателя, чтобы, с одной стороны, добиться по возможности более полного использования
Материалов двигателя, а с другой -- не допустить чрезмерного насыщения магнитной цепи.
Масса и стоимость многоскоростных двигателей несколько больше, чем у нормальных асинхронных двигателей такой же мощности.
Регулирование скорости уменьшением первичного напряжения.
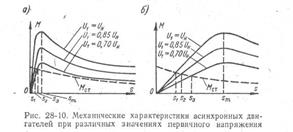
При уменьшении U1 момент двигателя изменяется пропорционально и соответственно изменяются механические характеристики (рис. 28-10), в результате чего изменяются также значения рабочих скольжений s1,s2 s3... при данном виде зависимости Мcт= f(s). Очевидно, что регулирование s в этом случае возможно в пределах 0 <s < sт. Для получения достаточно большого диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sт были достаточно велики (сравни рис. 28-10, а и б).
Следует учитывать, что во вторичной цепи возникают потери, равные мощности скольжения Рs и вызывающие повышенный нагрев ротора. Этот метод регулирования скорости применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления.
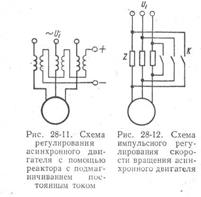
В связи с пониженным к. п. д. и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или сопротивления, включенные последовательно в первичную цепь. В последние годы для этой цели все чаще применяют (рис. 28-11) реакторы насыщения, регулируемые путем подмагничивания постоянным током (см. § 18-4). При изменении значения постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования скорости в область s > sт и получить при этом жесткие механические характеристики.
Импульсное регулирование скорости (рис. 28-12) производится путем периодического включения двигателя в сеть и отключения его от сети либо путем периодического шунтирования с помощью контактора или полупроводниковых вентилей сопротивлений, включенных последовательно в цепь статора. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (Рн << 30- 50 Вт).
Более подробно некоторые вопросы регулирования скорости вращения асинхронных двигателей рассматриваются в курсах электропривода.
Похожие статьи
-
Общая характеристики вопроса. Прямой пуск. При рассмотрений возможных способен пуска и ход асинхронных двигателей необходимо учитывать следующие основные...
-
Схема замещения асинхронного двигателя - Асинхронный двигатель
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и...
-
Расчет и построение располагаемой и желаемой ЛАЧХ Типовая, оптимизированная по модульному оптимуму, передаточная функция разомкнутой системы имеет вид: ,...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Расчет подчиненного регулирования скорости двигателя постоянного тока
Цель и задачи расчетно-графической работы. В соответствии с кинематической схемой исполнительного механизма (рис. 1) и заданным вариантом требуется: 1)...
-
Пуск асинхронных двигателей - Асинхронный двигатель
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя....
-
Ток якоря двигателя определяется формулой (29.2). Если принять U и неизменными, то ток Iа зависит от противо-ЭДС Еа. Наибольшего значения ток Iа...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Статическая мощность электродвигателя: , Где - предварительное значение КПД (для механизма подъема с цилиндрическим редуктором). Вт. Для легкого режима...
-
Стабилизация тока и скорость спада тока - Разработка стенда управления шаговым двигателем
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рас-сеиваемую мощность...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют...
-
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки. При...
-
Определим основные показатели качества регулирования оптимизированной системы по переходной характеристике по задающему воздействию, имеющей...
-
Время регулирования Переходная характеристика по задающему воздействию (рис. 1.12): . (1.71) Переходная характеристика по возмущающему воздействию (рис....
-
Тормозные режимы работы - Асинхронный двигатель
Работа многих производительных механизмов состоит из трех этапов: пуска в ход, технологической операции и торможения. После отключения двигателя...
-
Вращающееся магнитное поле. - Асинхронный двигатель
Допустим в начале, что все проводники статора двухполюсного асинхронного двигателя размещены в двух диаметрально расположенных пазах и в обмотке...
-
Для отсутствия буксования необходимо, чтобы сила сцепления приводных колес с рельсом была больше тягового усилия на их ободе Где: коэффициент сцепления...
-
Основные понятия - Асинхронный двигатель
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Статор имеет 24 паза, в которые вкладываю пусковую и рабочую обмотку, состоящие из 4 катушечных групп по три катушки. Схема обмотки двухслойная...
-
Способы изменения направления тока - Разработка стенда управления шаговым двигателем
При работе шагового двигателя требуется изменение направления маг-нитного поля независимо для каждой фазы. Изменение направления магнит-ного поля может...
-
Способы управления шаговым двигателем - Разработка стенда управления шаговым двигателем
Волновая и фазовая коммутация фаз Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена...
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
Принцип действия асинхронного двигателя - Асинхронный двигатель
В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле....
-
Номинальная ЭДС генератора рассчитывается по формуле: (В), Где 1,32 - коэффициент приведения сопротивлений обмоток генератора к температуре 750С. -...
-
Напряжение сжатия в Мпа , Где: Расчетное усилие в канате, Н; Толщина стенки и шаг нарезки, мм См См = 8мм Допускаемые напряжения можно принимать: ,...
-
Энергетические показатели асинхронного двигателя - Асинхронный двигатель
Важным в энергетическом отношении характеристиками двигателя являются зависимость КПД з И коэффициента мощности Cos ц от нагрузки на его валу. КПД...
-
Согласно (2.6) передаточная функция регулятора скорости имеет вид: ,(2.14) Где ; - коэффициент усиления регулятора скорости. (2.15) ЛАЧХ корректирующего...
-
Когда используются аналоговые выходы, может регулироваться скорость вентиляторов, например, при помощи преобразователя частоты типа AKD. Общее...
-
Механическая характеристика асинхронного двигателя - Асинхронный двигатель
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при...
-
Число зубьев ведомой звездочки . Значение округляют до целого, желательно нечетного числа Z . Уточнение передаточного числа цепной передачи Этот расчет...
-
Усилие на конвейере FT = 5,25 кН Скорость = 0,3 м/с Подбор электродвигателя Двигатель является одним из основных элементов машинного агрегата. От типа...
-
Устройство шаговых двигателей Двигатели с переменным магнитным сопротивлением [стр. 4, 2] Шаговые двигатели с переменным сопротивлением имеют несколько...
-
По ходу плавки в электродуговую печь требуется подавать различное количество энергии. Менять подачу мощности можно изменением напряжения или силы тока...
-
РОТОРЫ, НАЗНАЧЕНИЕ И УСТРОЙСТВО - Буровое оборудование
НАЗНАЧЕНИЕ И УСТРОЙСТВО Роторы предназначены для вращения вертикально подвешенной бурильной колонны с частотой 30300 об/мин при роторном бурении или...
-
Для данного двигателя применим простую волновую обмотку. Для нее число параллельных ветвей 2а=2. Определим магнитный поток: Число проводов в одной...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
Регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором - Пуск трехфазных асинхронных двигателей и регулирование их скорости вращения