Векторное регулирование асинхронного электропривода
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
Принято различать два основных способа управления электроприводами переменного тока, использующими в качестве преобразователей энергии полупроводниковые преобразователи частоты: частотное и векторное.
Частотное, или скалярное управление достигается путем воздействия на величину и частоту напряжения статора, которые являются двумя управляющими воздействиями, соотношение между которыми называется законом частотного управления. Способ обеспечивает сравнительно невысокие динамические характеристики и диапазон регулирования скорости.
При векторном управлении регулирование осуществляется по мгновенным значениям переменных. В цифровых векторных системах может выполняться управление по эквивалентным (усредненным на интервале дискретности управления) переменным.
Векторное регулирование применяется при повышенных требованиях к динамическим или статическим характеристикам регулирования выходных переменных привода, в случаях, когда регулируемой переменной является момент. А также в электроприводах главного движения и подач металлорежущих станков, в намоточных механизмах, требующих регулирование натяжения материала, в сервоприводах, выполняющих задачу быстродействующего регулирования положения, в тяговом электроприводе, в приводе электродов дуговых сталеплавильных печей и множестве других механизмов [1].
Существуют различные варианты построения систем векторного управления асинхронным электроприводом, среди которых системы с непосредственным измерением потокосцепления и с моделью роторной цепи, система прямого управления моментом, система частотно-токового управления, цифровая релейно-векторная система управления асинхронным электроприводом. Наиболее широкое распространение в системах векторного регулирования получил способ ориентации переменных по вектору потокосцепления ротора (рис.1). Часто такой способ называют ориентацией по полю.
Асинхронный двигатель (АД) при ориентации по полю приобретает характеристики, близкие к характеристикам двигателя постоянного тока, а в электроприводе обеспечивается:
- 1) раздельное регулирование магнитного потока и электромагнитного момента двигателя; 2) в режиме поддержания постоянства потокосцепления ротора реализуется предельно допустимое быстродействие при управлении моментом.
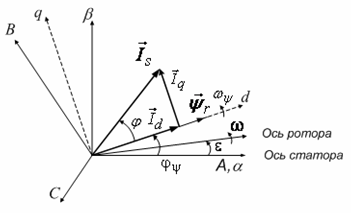
Рис. 1. Способ ориентация по вектору потокосцепления ротора
Векторный асинхронный электропривод полупроводниковый
Системы векторного управления, называемые также системами с ориентацией по полю, можно подразделить на системы с прямой и косвенной ориентацией по полю.
К системам с прямой ориентацией по полю относят только те системы, в которых осуществляется непосредственное измерение потока с помощью тех или иных датчиков потока. В системах с косвенным измерением поток не измеряется и не рассчитывается, а формируется путем задания других переменных [1]. Структуры этих систем показаны на рис.1а и рис.1б.


А) б)
Рис. 1. Структура привода с прямой и косвенной ориентацией по полю: а - с моделью двигателя; б - с косвенной ориентацией.
Основополагающим принципом векторного регулирования является ориентация векторных переменных электропривода друг относительно друга. Ориентация может выполняться практически по любой векторной переменной, однако обычно выбирают переменные, ориентация по которым позволяет получить:
- 1) наилучшие динамические и статические свойства привода; 2) наиболее простую структуру системы управления.
При векторном управлении регулирование осуществляется в системе координат, вращающейся синхронно с векторами состояний двигателя. Эту систему координат можно связать с различными векторами состояний, но, как правило, ее связывают с вектором шR - потоком ротора. Оси этой двухфазной системы координат называют d и q, причем по потоку ротора ориентируют осью d этой системы.
Уравнения электромагнитных процессов АД, записанные относительно токов статора и потокосцеплений ротора в синхронной ортогональной системе координат (d, q), ориентированной по вектору потокосцепления ротора, имеют следующий вид:







Где - активные сопротивления фаз статора и ротора; - индуктивности фаз статора, ротора, взаимная; - коэффициент рассеяния; - постоянная времени роторной цепи; - проекции векторов напряжения и тока статора на оси d и q; - частота вращения вектора потокосцепления ротора; - электрическая частота вращения ротора; - частота скольжения [1].
Управлять скоростью двигателя можно, изменяя его момент, то есть система должна содержать регулятор скорости, задающий момент и структуру, обеспечивающую его отработку [3].
На рис. 3 показана структура системы векторного регулирования скорости асинхронного двигателя.
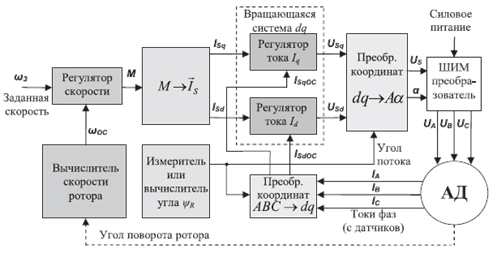
Рис. 3. Структура системы векторного регулирования скорости асинхронного двигателя
Момент двигателя изменяется с помощью управления статорным током (вектором статорного тока). Тогда для синтеза системы необходимо связать момент двигателя с параметрами вектора статорного тока.
Векторный регулятор тока, работающий во вращающейся системе координат dq, состоит из двух скалярных регуляторов d и q проекций вектора и использует в качестве обратной связи измеренный и преобразованный в систему dq реальный вектор статорного тока [3].
В соответствии с известными параметрами можно найти проекции тока статора:

А также потокосцепление и угловую частоту ротора:

Можно сказать, что с помощью проекции вектора тока статора Id можно управлять потокосцеплением ротора и передаточная функция этого канала соответствует апериодическому звену с постоянной времени равной постоянной времени ротора; а с помощью проекции Iq можно независимо управлять частотой ротора щr.
Подставляя Iq в выражение электромагнитного момента, получим [2]:

При этом регулятор тока формирует в системе dq вектор напряжения статора, характеризующийся двумя составляющими: USd и USq [3]:


Далее с помощью координатных преобразований вектор напряжения статора переводится в неподвижную систему координат:


связанную со статором, где затем и реализуется.
Таким образом, для синтеза системы регулирования необходимо определить связь между моментом и проекциями вектора тока статора на оси системы dq, вращающейся синхронно с потоком ротора. Реализация вектора напряжения статора в подавляющем большинстве систем векторного регулирования осуществляется с помощью широтно-импульсной модуляции (ШИМ). В силу адекватности управления в динамике векторное управление дает возможность строить высокодинамичные и прецизионные электроприводы переменного тока, обеспечивающие наивысшую точность и скорость регулирования.
Библиографический список
- 1. Виноградов А. Б. Векторное управление электроприводами переменного тока.: ГОУВПО "Ивановский государственный энергетический университет имени В. И. Ленина".: Иваново, 2008, 298 с 2. Усольцев А. А. Векторное управление асинхронными двигателями: Учебное пособие по дисциплинам электромеханического цикла.: СПб, 2002, 43с. 3. Калачев Ю. Н. Векторное регулирование (заметки практика).: "ЭФО", 2013, 72с.
Похожие статьи
-
Скорость вращения ротора асинхронного двигателя (28-3) Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно...
-
Общая характеристики вопроса. Прямой пуск. При рассмотрений возможных способен пуска и ход асинхронных двигателей необходимо учитывать следующие основные...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
Векторная схема и вывод векторного уравнения задачи прицеливания Векторная схема задачи прицеливания при стрельбе из авиационного артиллерийского оружия...
-
Расчет подчиненного регулирования скорости двигателя постоянного тока
Цель и задачи расчетно-графической работы. В соответствии с кинематической схемой исполнительного механизма (рис. 1) и заданным вариантом требуется: 1)...
-
Пуск асинхронных двигателей - Асинхронный двигатель
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя....
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Принцип действия асинхронного двигателя - Асинхронный двигатель
В обмотке статора, включенной в сеть трехфазного тока, под действием напряжения возникает переменный ток, который создает вращающееся магнитное поле....
-
Рассматриваемая ЭМС и ЭМС-аналог содержат асинхронный и шаговый (ШД) электродвигатели соответственно. Каждый из типов электродвигателей имеет свои...
-
Методы настройки двухсвязных систем регулирования - Автоматические регуляторы
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой...
-
Время регулирования Переходная характеристика по задающему воздействию (рис. 1.12): . (1.71) Переходная характеристика по возмущающему воздействию (рис....
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Введение - Автоматическая система регулирования температуры сушильного шкафа
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса....
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Тормозные режимы работы - Асинхронный двигатель
Работа многих производительных механизмов состоит из трех этапов: пуска в ход, технологической операции и торможения. После отключения двигателя...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором...
-
Механическая характеристика асинхронного двигателя - Асинхронный двигатель
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при...
-
Схема замещения асинхронного двигателя - Асинхронный двигатель
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Вращающееся магнитное поле. - Асинхронный двигатель
Допустим в начале, что все проводники статора двухполюсного асинхронного двигателя размещены в двух диаметрально расположенных пазах и в обмотке...
-
Функциональные задачи Cистема электроприводов должна обеспечивать повороты правого и левого крыльев солнечных батарей по крену, а также иметь оговоренные...
-
Определим основные показатели качества регулирования оптимизированной системы по переходной характеристике по задающему воздействию, имеющей...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Переходную характеристику по задающему воздействию строят на основании ее передаточной функции Данная характеристика представлена на рисунке 1.12...
-
В процессе выполнения курсовой работы был произведен анализ САР температуры сушильного шкафа. В терминах передаточных функций были описаны все...
-
Находим силу поднимаемого груза: M - масса груза. G - ускорение свободного падения (9,8) Fтр сила поднимаемого груза приходящегося на трос Определяем...
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Основные показатели качества регулирования - Автоматические регуляторы
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект,...
-
Выбор канала регулирования - Автоматические регуляторы
Одним и тем же выходным параметром объекта можно управлять по разным входным каналам. При выборе нужного канала управления исходят из следующих...
-
Когда используются аналоговые выходы, может регулироваться скорость вентиляторов, например, при помощи преобразователя частоты типа AKD. Общее...
-
Средства контроля АК-2 - Модули. Базовый модуль - предназначен для управления центральной холодильной машиной Модули расширения. В сложных системах могут...
-
Одним из первых вопросов, возникающих при исследовании и проектировании линейных систем управления, является вопрос об их устойчивости. Линейная система...
-
Основные понятия - Асинхронный двигатель
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
По ходу плавки в электродуговую печь требуется подавать различное количество энергии. Менять подачу мощности можно изменением напряжения или силы тока...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
Векторное регулирование асинхронного электропривода