Классификация системы управления - Цифровая система автоматического регулирования температуры воды в баке
Данную систему управления можно отнести к:
- 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической
Приведенная выше классификация основывалась на классификации ОУ. Дополним ее другими свойствами:
- 1. Система является системой автоматического регулирования, так как происходящие в ней процессы не требуют вмешательства человека 2. По алгоритму функционирования (цели регулирования) данную систему управления можно отнести к Системе стабилизации, так как она служит для поддержания постоянной температуры при произвольно меняющихся возмущающих воздействиях. 3. По свойствам в установившемся режиме систему можно назвать Астатической. Это объясняется тем, что отклонение управляемой величины при установившемся значении возмущения равно нулю. Астатизм можно также определить, проанализировав схему: так как в схеме имеется интегрирующее звено - редуктор - система является астатической. 4. Данная система является системой непрямого действия, так как для регулирования температуры воды требуется использования дополнительных источников энергии (необходима энергия для работы двигателя и генератора) 5. По сложности управления система принадлежит к классу обычных, поскольку в системе всего одна обратная связь. 6. По способу формирования управляющего сигнала систему можно отнести к классу цифровых САР. Ампл. Мод. 7. ЦСАР будем относить к одночастотным импульсным системам с амплитудной модуляцией первого рода, поскольку частота квантования сигналов во всех элементах цифрового регулятора (АЦП, ВУ, ЦАП) происходит с одинаковым периодом ТО. 8. Система является синхронной, поскольку квантование во всех элементах цифрового регулятора осуществляется с помощью таймера единого времени, то есть все элементы регулятора срабатывают синхронно. 9. Систему также будем считать синфазной, то есть будем предполагать что в силу особенности построения ЦР в элементах регулятора не происходит сдвига сигнала на периоде квантования.
В процессе проектирования системы автоматического управления решаются следующие основные задачи:
- 1) аппаратная реализация системы; на этом этапе проектирования выбирается соответствующий тип контроллеров, устройства ввода/вывода, устройства отображения параметров системы управления и ввода задающих сигналов; решаются вопросы электромагнитной совместимости оборудования системы управления; 2) разработка или выбор соответствующей операционной системы, разработка драйверов устройств, использование языков программирования; 3) разработка алгоритмов управления, обеспечивающих требуемые показатели точности, устойчивости, качества переходных процессов.
Целью данного курса является изучение методов анализа и синтеза цифровых систем автоматического управления, т. е. изучение вопросов, относящихся к третьей группе перечисленных выше задач.
На рис. 1.1 показана типичная импульсная система управления с обратной связью. Квантователь представляет собой устройство, выходной сигнал которого имеет вид периодической или непериодической последовательности импульсов, причем между двумя соседними импульсами информация отсутствует.
В литературе по управлению термины "импульсные системы", "дискретные системы", "системы с дискретным временем", "цифровые системы " используются довольно произвольно.
На рис. 1.1 показана типичная импульсная система управления с обратной связью.
Квантователь представляет собой устройство, выходной сигнал которого имеет вид периодической или непериодической последовательности импульсов, причем между двумя соседними импульсами информация отсутствует.
Рис. 1.2 Иллюстрирует принцип работы квантователя. Непрерывный входной сигнал Е(t) квантуется по времени, при этом выходной сигнал квантователя представляет собой последовательность импульсов. Предполагается, что в рассматриваемом случае частота квантования постоянна, а амплитуда импульса в момент замыкания определяется соответствующим значением входного сигнала Е (t). Существуют и другие способы квантования сигналов, например, квантование с циклически изменяющимся периодом, многократное, со случайным периодом, с широтно-импульсной модуляцией.
Дискретные и цифровые системы управления отличаются от непрерывных или аналоговых тем, что сигналы в одной или нескольких точках этих систем представляют собой последовательность импульсов или цифровой код.
Правильнее термин "импульсные" относить к системам с амплитудной модуляцией импульсов, при которой информационным параметром является амплитуда импульса, термин "цифровые" обычно относят к системам, в которых сигналы генерируются ЭВМ или цифровыми устройствами в виде кодов. Однако в реальных системах управления могут присутствовать как аналоговые и импульсные сигналы, так и цифровые коды.
Основные характерные черты цифровой САР температуры жидкости связаны с наличием цифрового устройства в контуре замкнутой системы.
В цифровой системе управления сигналы в одной или нескольких точках представляются цифровыми кодами, с которыми оперируют цифровое устройство. Структура типичной цифровой системы управления показана на рис. 1.3. Наличие в некоторых точках системы сигналов в виде цифрового кода, например, двоичного, обусловливает использование цифроаналогового (цап) и аналого-цифрового (АЦП) преобразователей. На практике наиболее распространены квантование с постоянным периодом и многократное квантование. Расположенный между квантователем и управляемым процессом фильтр выполняет функцию сглаживания, так как большинство управляемых процессов рассчитано на прием аналоговых сигналов.
Хотя между структурами и элементами импульсной и цифровой систем имеются существенные различия, математические описания этих систем достаточно близки, и они могут быть исследованы одинаковыми аналитическими методами.
Рис. 1.3. Типичная цифровая система управления
Вычислительная программа в соответствии с некоторым алгоритмом преобразует входную числовую последовательность е[к] в управляющую последовательность на выходе цифрового регулятора u[k]. Программа цифрового регулятора может быть изменена в соответствии с требованиями проектировщиков или приспособлена к характеристикам объекта без каких-либо изменений в аппаратном обеспечении.
Для расчета очередного управляющего воздействия требуется некоторое время, которое определяет, так называемое вычислительное запаздывание.
Выбор периода квантования цифровых преобразователей
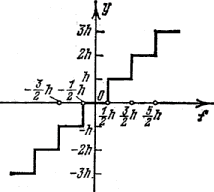
Рис. 1.5.
Процесс получения последовательности {а} из последовательности {а*N} называется Квантованием дискретного сигнала по уровню.
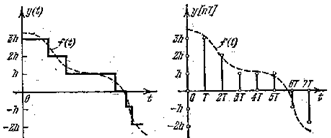
Заметим, что можно говорить и о квантовании по уровню непрерывного сигнала, если он заменяется сигналом, принимающим одно из дискретных значений {а*П}. Например, если преобразовать непрерывный сигнал f(t) с помощью многоступенчатого релейного устройства, имеющего статическую характеристику, показанную на рис. 1.5, то получится "дискретный по уровню сигнал, показанный на рис 1.6,а.
На рис. 1.6,б показан результат квантования сигнала по уровню и по времени. Такое квантование выполняется при цифро-аналоговом преобразовании сигналов.
А)б)
Рис. 1.6. Квантование сигнала по уровню и по времени
Аналого-цифровой преобразователь
Термометр сопротивления выдает аналоговый сигнал стандартного диапазона в виде напряжения 0-10 В. Этот сигнал в АЦП квантуется по уровню и переводится в цифровой код. На выходе АЦП сигнал представлен в формате с фиксированной точкой.
Точность преобразования определяется шагом квантования
(вставка 4)
Будем полагать, что температура жидкости измеряется в диапазоне 0-100 С, равна 10 В. Разрядность АЦП равна 7, максимальное преобразуемое напряжение равно 10 В.
Определим величину шага квантования по уровню
(вставка 5)
Шаг квантования определяет минимальное, преобразуемое без искажений напряжение.
На выходе АЦП формируется численное значение кода, равное целому числу шагов квантования по уровню, содержащихся в аналоговом входном воздействии U, поданном на АЦП. Остаток либо округляется, в результате чего получается ближайшее снизу или сверху целое число.
Таким образом, строго говоря, квантование по уровню является причиной нелинейности статической характеристики АЦП. Однако, учитывая, что сигнал изменяется в довольно широком диапазоне и обработка его осуществляется процессором с большой разрядной сеткой (при разрядности больше или равно 8), то можно считать, что квантование по уровню вносит незначительные погрешности и амплитуды сигнала на выходе АЦП практически можно считать как непрерывные. Статическую характеристику в этом случае можно рассматривать как линейную.
Цифро-аналоговый преобразователь на основе сигнала с выхода вычислителя в виде цифрового двоичного кода восстанавливает непрерывный сигнал управления. Будем считать, что ЦАП работает с тем же периодом дискретизации по времени, что и АЦП, а также, что оба устройства
Вставка 6.
Похожие статьи
-
В ходе данной работы необходимо установить свойства системы автоматического управления, определить ее временные и частотные характеристики, а также...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Описание функциональной схемы Рис 1. САР температуры сушильного шкафа Данная САР предназначена для управления температурой сушильного шкафа. Значит,...
-
Введение - Автоматическая система регулирования температуры сушильного шкафа
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса....
-
Система автоматического управления это - комплекс устройств, предназначенных для автоматического изменения одного или нескольких параметров объекта...
-
Одним из первых вопросов, возникающих при исследовании и проектировании линейных систем управления, является вопрос об их устойчивости. Линейная система...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
В процессе выполнения курсовой работы был произведен анализ САР температуры сушильного шкафа. В терминах передаточных функций были описаны все...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
Основные показатели качества регулирования - Автоматические регуляторы
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект,...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Методы настройки двухсвязных систем регулирования - Автоматические регуляторы
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой...
-
Введение - Анализ системы автоматического управления
Анализ линейных систем автоматического управления -- исследование влияния структуры, численных значений параметров и внешних воздействий на динамические...
-
По структурной схеме системы, приведенной на Рис. 6.1., составим математическую модель проектируемой системы для дальнейшего моделирования, которая...
-
При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления. Под структурой управления понимается...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Рассмотрим ЛАЧХ и ЛФЧХ системы (рисунок 18): Рисунок 21 - ЛАЧХ и ЛФЧХ разомкнутой системы по каналу управления Исследуемая система устойчива, если ее...
-
Исследование временных характеристик Для того, чтобы исследовать динамические свойства системы, рассмотрим временные и частотные характеристики системы....
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Заключение, Список литературы - Анализ системы автоматического управления
Была проанализирована система дифференциальных уравнений. На основе анализа были составлены передаточные функции, на основании которых, была сформирована...
-
Исследование одноконтурной САР на основе практических методик ее настройки Цель работы: освоение практических методик идентификации объектов управления и...
-
Уравнения состояния и основные передаточные функции замкнутой системы В данной работе рассматривается АСР, управление в которой организованно по принципу...
-
АЧХ и ФЧХ функциональных элементов системы Амплитудная частотная характеристика (АЧХ) и фазовая частотная характеристика (ФЧХ) находятся по следующим...
-
Исследование качества САР - Цифровая система автоматического регулирования температуры воды в баке
Качество линейных САР принято характеризовать точностью и быстродействием их работы в переходном и установившемся режимах. И переходный, и установившийся...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
По числу входных управляющих воздействий и выходных переменных ОУ по каналу "GТ - Тв" является Одномерным (одноканальным) , поскольку имеет один...
-
Системы диагностики и управление точности обработки - Виды автоматизированных производств
Любое спроектированное и изготовленное технологическое оборудование и его система ПУ в процессе эксплуатации должны находиться в работоспособном...
-
Определение требований к системе Прежде чем начать проектирование системы производства поролона нужно определить функции, которые будет выполнять...
-
Проектируемая система адаптивного управления представляет собой комплексную систему автоматического регулирования, состоящую из двух подсистем,...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
Классификация системы управления - Цифровая система автоматического регулирования температуры воды в баке