Выбор принципиальной электрической схемы электропривода - Электропривод механизма передвижения тележки козлового крана
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором с панелью управления ТСД
Электроприводы с динамическим торможением с самовозбуждением выполняются только для механизмов подъема, и их применение целесообразно во всех случаях, когда предъявляются повышенные требования к регулированию крановых механизмов с приводом переменного тока. Комплектные электроприводы охватывают все крановые асинхронные двигатели с фазным ротором при управлении от кулачковых контроллеров ККТ65 в комплексе с панелью ТРД160 и панелями управления ТСД. Эти электроприводы выпускаются только для механизмов общего назначения. Для крановых механизмов металлургического производства выпускается специальная серия электроприводов с режимом динамического торможения самовозбуждения и теристорными узлами бездуговой коммутации.
Электроприводы с силовыми контроллерами имеют мощность привода от 5 до 30 кВт, а с панелями управления - от 5 до 150 кВт в режиме работы 4М при ПВ = 40%. Электроприводы с кулачковыми контроллерами имеют отдельную панель защиты, электроприводы с панелями управления имеют только индивидуальную защиту. Панели управления по построению схемы выпускаются двух типов соответственно для возбуждаемых и не возбуждаемых электродвигателей. Первые из этих панелей применяются для двигателей, напряжение на кольцах ротора которых не превосходят 300 В, вторые - при напряжении ротора свыше 300 В. Применение режима динамического торможения самовозбуждением позволяет получить устойчивые посадочные скорости при диапазоне регулирования при 4:1 в системе с кулачковыми контроллерами и до 8:1 - с панелями управления. Эквивалентный КПД привода в режиме 4М до 75%. Следует также отметить, что, обладая повышенными регулировочными и энергетическими свойствами, рассматриваемые электроприводы позволяют значительно улучшить использование двигателей и повысить надежность работы контакторной аппаратуры благодаря снижению числа включению привода при осуществлении доводочных операций.
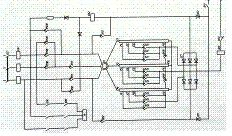
Схема электропривода приведена на рисунке. В схеме реверс осуществляется контакторами КМ1В и КМ2В, динамическое торможение - контактором КМ2, механически сблокированным с силовым контактором КМ1. Подпитка двигателя в режиме динамического торможения осуществляется от от сети через контакт КМ2 цепи подключения выпрямителя UZ1, реле контроля КА2, диод, резистор. Регулирование скорости осуществляется контакторами КМ1V - КМ4V
При подъеме и спуске предусматривается автоматический спуск под контролем реле времени КТ1 - КТЗ. Режим динамического торможения реализуется на всех положениях спуска, кроме последнего, на котором двигатель работает от сети с минимальным не выключаемым сопротивлением в роторе. При остановке привода со спуска в течение времени выдержки реле КТ4 остается включенным контактор КМ2 и осуществляется динамическое торможение, что необходимо для облегчения работы тормоза YA. В схемах для самовозбуждаемых двигателей контур динамического торможения, как уже было сказано, в нулевом положении не отключается. При торможении с подъема тормоз накладывается сразу. Вся защита вынесена непосредственно на панель управления. Защита является типовой и включает в себя: нулевую защиту - контактор КМ4, максимальную - реле КА1, конечную - выключатели SQ1 и SQ2, от пробоя диодов - реле КН1.
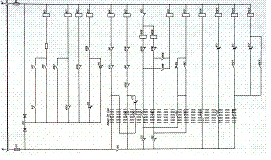
Принципиальная схема передвижения тележки козлового крана
Похожие статьи
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
Грузоподъемные машины и механизмы предназначены для перемещения грузов в вертикальной и горизонтальной плоскостях на относительно небольшие расстояния....
-
Для механизмов передвижения кранов, работающих вне механических цехов, когда присутствует ветровая нагрузка, статический момент механизма обусловлен не...
-
Заключение, Список литературы - Электропривод механизма передвижения тележки козлового крана
В данной работе был произведен расчет электрооборудования для механизма передвижения тележки козлового крана. Был выбран подходящий двигатель, рассчитаны...
-
Техника безопасности - Электропривод механизма передвижения тележки козлового крана
В каждом цехе, на строительной площадке или другом участке работ грузоподъемных кранов должно быть назначено приказом по предприятию или строительству...
-
Справочные данные электродвигателя - Электропривод механизма передвижения тележки козлового крана
Номинальная мощность P Ном = 7.5 кВт Номинальная частота вращения N Н = 690 об/мин Номинальное напряжение U Н = 380 В Максимальный момент M Max = 265 Н-м...
-
Общий вид козлового крана - Электропривод механизма передвижения тележки козлового крана
Механизмы имеют техническую характеристику, по которой их подбирают для того или иного крана. В характеристику механизма включают параметры двигателя...
-
Введение - Электропривод механизма передвижения тележки козлового крана
Простейшие подъемно-транспортные устройства - рычаги, вороты, а также рычажные и ковшовые подъемники - были известны разным народам еще в глубокой...
-
Описание работы электросхемы моста - Электрооборудование мостового крана
Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения силового контроллера или...
-
1. Тележка (рис.4) имеет опорные ходовые колеса 1 и 2. Ходовое колесо 1 приводится в движение при помощи электродвигателя 3 через редуктор 4. На...
-
Крановые защитные панели: Крановые защитные панели применяют при контроллерном управлении двигателями крана, а также вместе с некоторыми магнитными...
-
Система питания. Источник питания - трехфазная сеть переменного тока, напряжением 380* 10%, частотой 50 Гц. Напряжение вторичных источников: А)...
-
Описание работы принципиальной схемы - Электрооборудование механизма подъема мостового крана
Для начала работы электротехнический персонал собирает схему, включая автоматические выключатели QF1, QF2, QF3. Одновременно с подачей напряжения...
-
Выбор исходных данных и силовая схема к расчету Вес крана GТ=1818к Н Вес груза GГр=360 кН Скорость передвижения крана V=1.25м/с Диаметр колеса D=0.95 м...
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
Выбор реле защиты от перегрузок - Проект мостового крана
Обеспечение максимальной и нулевой защиты крановых электроприводов управляемых при помощи магнитных контроллеров возлагается на защитные панели. Для...
-
Выбор аппаратуры управления, Выбор магнитного контроллера - Проект мостового крана
Выбор магнитного контроллера Магнитные контроллеры представляют собой сложные комплектные коммутационные устройства для управления крановыми...
-
Статистические моменты, приведенные к валу двигателя: 1. При подъеме груза (8) - вес поднимаемого груза, Н; - вес грузозахватного устройства, Н; -...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Статическая мощность электродвигателя: , Где - предварительное значение КПД (для механизма подъема с цилиндрическим редуктором). Вт. Для легкого режима...
-
Хотя габаритные размеры всех трех холодильников почти одинаковые, однако сильно отличается объем холодильной камеры и морозильного отделения. Таблица...
-
Мостовые краны Электрические подъемные краны - это устройства служащие для вертикального и горизонтального перемещения грузов. Подвижная металлическая...
-
Мостовой кран предназначен для подъема и перемещения грузов при производстве сборочных, монтажных, технологических и складских работ. Мостовой кран...
-
Смазывание - это нанесение смазочного материала на трущиеся поверхности для уменьшения сопротивления трению и повышению износостойкости трущихся...
-
Стоимость и продолжительность монтажа могут быть значительно уменьшены при внедрении прогрессивных методов организации и производства работ. При этом...
-
Крановые защитные панели - Рубильник и защитная панель
Конструкция защитной панели представляет собойметаллический шкаф с установленной в нем аппаратурой. Шкаф закрыт дверью с замком. Второй замок...
-
Нагрузка кранов, как правило, изменяется в широких пределах: для механизмов подъема - от 0,12 до 1,0 а для механизмов передвижения - то 0,5 до 1,0...
-
При реактивном характере нагрузки производственного механизма примем вид торможения - динамическое. Расчет механической характеристики при динамическом...
-
Расчет мощности электродвигателя привода мостового крана по нагрузочному графику и выбор электродвигателя в каталоге Исходными данными проектирования...
-
Контакторы серий КТ и КТП предназначены для ком - мутации главных цепей электроприводов переменного тока с номинальным напряжением 380 В. Контакторы...
-
Задание: спроектировать механизм подъема груза мостового крана общего назначения. Дано: грузоподъемность кг; скорость подъема ; высота подъема ; режим...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
В качестве электрической схемы генератора тактовых импульсов выберем мультивибраторный вариант его построения на биполярных транзисторах, которые...
-
Специальная часть, Обоснование и выбор тока - Электрооборудование механизма подъема мостового крана
Обоснование и выбор тока Электропривод переменного тока с асинхронными электродвигателями становится все популярнее. Асинхронные двигатели имеют простоту...
-
Выбираю преобразователь КТЭ 320/220 А (440 В) Семейство продуктов КТЭ Тип изделия или компонента Привод с регулируемой частотой вращения Специальное...
-
Статический момент на выходном валу редуктора при торможении , Где - КПД механизма, который можно принять равным КПД редуктора; - номинальное...
-
Мостовой кран работает в относительно чистом, сухом помещении, следовательно, абразивный и коррозионный износ проволок каната незначителен. Поэтому...
-
Основной характеристикой разливочных кранов являются их грузоподъемность, определяющая вместимостью сталеплавильных агрегатов. Применяются разливочные...
-
Исходные данные: 1) Вес поднимаемого груза Gг=80 т 2) Вес грузозахватывающего устройства Gо=0, 1 т 3) Скорость подъема Vп=6 м/мин 4) Высота подъема Н=6 м...
-
В качестве электрической схемы рассмотрим пускатель бесконтактный нереверсивного типа ПБН-160 предназначен для обеспечения плавного нарастания напряжения...
Выбор принципиальной электрической схемы электропривода - Электропривод механизма передвижения тележки козлового крана