Методы настройки двухсвязных систем регулирования - Автоматические регуляторы
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой автономной работы двух регуляторов вся система может стать неустойчивой за счет действия перекрестной связи в объекте управления.
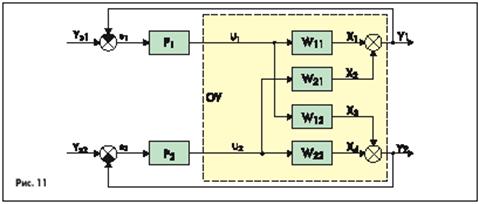
Объект управления в двухсвязной системе представлен в Р-канонической форме. Удобство такого представления заключается в том, что путем активного эксперимента можно определить все передаточные функции по соответствующим каналам. Промежуточные сигналы x 1 , x 2 , x 3 , x 4 обычно недоступны для измерения, поэтому управление ведется по вектору выхода Y:

На практике довольно большое число систем являются двухсвязными. Для объективной настройки регуляторов двухсвязных систем формируется критерий качества вида:

Где y 1 и y 2 -- коэффициенты веса (штрафа), J1 и J 2 -- критерии качества первого и второго контуров.
Путем перераспределения коэффициентов веса y 1 и y 2 можно выделить более важный контур, качество процессов управления в котором должно быть более высоким. Например, если первый контур должен обеспечивать более высокую точность работы, то y 1 требуется увеличить.
Задача настройки регулятора состоит в том, чтобы при заданных y 1 и y 2 обеспечить минимальное значение J 0 Системы, где
Рассмотрим различные методы настройки регуляторов в двухсвязных системах.
Метод автономной настройки регуляторов
В этом случае настройка регуляторов Р 1 и Р 2 производится последовательно, без учета взаимных влияний контуров. Процедура настройки осуществляется следующим образом:
- - регулятор Р 2 переводится в ручной режим работы; - настраивается регулятор Р 1 Так, чтобы критерий J 1 был минимален; - отключается настроенный регулятор Р 1 и включается регулятор Р 2 ; - настраивается Р 2 , обеспечивая минимум J 2 ; - оба регулятора включаются в работу.
Такой подход рекомендуется использовать если:
- - наблюдается малое взаимное влияние контуров; - быстродействие одного контура значительно выше другого (контуры разнесены по частотам); - в перекрестных связях одна из передаточных функций имеет коэффициент передачи значительно меньше, чем другая, то есть наблюдается одностороннее влияние.
Метод итеративной настройки регуляторов
Этот метода аналогичен предыдущему, но здесь осуществляется многократная настройка регуляторов Р 1 и Р 2 (последовательная подстройка) с целью обеспечения минимального значения критерия качества J 0 всей системы.
Следует учитывать, что только метод итеративной настройки регуляторов обеспечивает качественную работу двухсвязной системы даже при наличии сильных перекрестных связей. Это объясняется тем, что оптимизация критерия качества J 0 системы происходит при включенных Р 1 И Р 2 .
Данный метод часто применяется при аналоговом и цифровом моделировании двухсвязных систем, так как в реальных условиях он весьма трудоемок.
Метод аналитического конструирования регуляторов
Этот метод позволяет синтезировать многомерный регулятор, учитывающий в своей структуре взаимосвязь переменных в объекте управления. Синтез ведется с помощью методов теории оптимального или модального управления при описании объекта в пространстве состояний.
Структурная схема оптимального регулятора состояния, содержащего наблюдающее устройство, приведена на рис.12. Схема содержит следующие элементы: Н -- наблюдатель, ОУ -- объект управления, МОУ -- модуль объекта управления, ОРС -- оптимальный регулятор состояния, Е Н -- ошибка наблюдения, X М -- вектор состояния модели, X Зад.-- вектор задания, U -- вектор входа ОУ, Y -- вектор выхода ОУ, Y М -- вектор выхода модели.
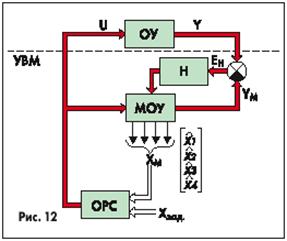
Оптимальный регулятор состояния, являясь наиболее совершенным типом регулятора, требует измерения всех компонентов вектора состояния объекта. Для получения их оценок (x) используется динамическая модель объекта (цифровая или аналоговая), подключенная параллельно исходному ОУ. Для обеспечения равенства движений в реальном объекте и модели используется наблюдатель, который, сравнивая движения векторов Y и Y М , обеспечивает их равенство (E H >0 ). Параметры регулятора состояния рассчитываются методами аналитического конструирования регуляторов путем минимизации интегрального квадратичного критерия качества
Где Q и R -- матрицы штрафов (весов) на компоненты вектора состояния и вектора управления.
Похожие статьи
-
Экспериментальные методы настройки регулятора - Автоматические регуляторы
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические...
-
Исследование одноконтурной САР на основе практических методик ее настройки Цель работы: освоение практических методик идентификации объектов управления и...
-
Выбор типа регулятора - Автоматические регуляторы
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Основные показатели качества регулирования - Автоматические регуляторы
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект,...
-
В ходе данной работы необходимо установить свойства системы автоматического управления, определить ее временные и частотные характеристики, а также...
-
Одним из первых вопросов, возникающих при исследовании и проектировании линейных систем управления, является вопрос об их устойчивости. Линейная система...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
Исследование временных характеристик Для того, чтобы исследовать динамические свойства системы, рассмотрим временные и частотные характеристики системы....
-
Исследование качества САР - Цифровая система автоматического регулирования температуры воды в баке
Качество линейных САР принято характеризовать точностью и быстродействием их работы в переходном и установившемся режимах. И переходный, и установившийся...
-
В процессе выполнения курсовой работы был произведен анализ САР температуры сушильного шкафа. В терминах передаточных функций были описаны все...
-
Введение - Автоматическая система регулирования температуры сушильного шкафа
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса....
-
При создании и эксплуатации автоматических систем необхо-димо стремиться обеспечить заданную, а иногда и максимальную надежность системы при...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Принцип работы системы и функциональная схема САР В данной работе рассматривается система автоматического регулир Ования температуры воды в баке. Схема...
-
Для обеспечения требуемых статических и динамических параметров определим требуемую структуру системы. Поскольку необходимо регулировать мощность...
-
Выбор канала регулирования - Автоматические регуляторы
Одним и тем же выходным параметром объекта можно управлять по разным входным каналам. При выборе нужного канала управления исходят из следующих...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
По структурной схеме системы, приведенной на Рис. 6.1., составим математическую модель проектируемой системы для дальнейшего моделирования, которая...
-
Любой технологический процесс, протекающий на каком-либо объекте, можно характеризовать одним или несколькими параметрами. Эти параметры процесса в...
-
Рассмотрим ЛАЧХ и ЛФЧХ системы (рисунок 18): Рисунок 21 - ЛАЧХ и ЛФЧХ разомкнутой системы по каналу управления Исследуемая система устойчива, если ее...
-
Модель системы в надсистеме (МСН): Модель системы представляет собой графическое отражение основных элементов подсистемы, в которую входит изучаемый...
-
Наладку систем автоматизации начинают до полного завершение всех монтажных работ на объекте. При этом необходимо убедиться в том, что отдельные приборы...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Уравнения состояния и основные передаточные функции замкнутой системы В данной работе рассматривается АСР, управление в которой организованно по принципу...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
По числу входных управляющих воздействий и выходных переменных ОУ по каналу "GТ - Тв" является Одномерным (одноканальным) , поскольку имеет один...
-
Управление качеством продукции - Системы качества по международным стандартам ИСО серии 9000
В 70-80-х годах ученые и специалисты многих стран пришли к выводу, что качество не может быть гарантировано только путем контроля готовой продукции. Оно...
-
Силовое напряжение 380 В общецеховой сети подводится к клеммам. Х1-1,2,3 шкафа PLC и далее к вводному автоматическому выключателю Q1 расположенному в...
-
ОБЩАЯ ХАРАКТЕРИСТИКА УСЛОВИЙ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ - Надежность систем автоматизации
Автоматические системы, а также их отдельные элементы при эксплуатации находятся под воздействием различных факто-ров, которые будем называть нагрузками....
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Согласно (2.6) передаточная функция регулятора скорости имеет вид: ,(2.14) Где ; - коэффициент усиления регулятора скорости. (2.15) ЛАЧХ корректирующего...
Методы настройки двухсвязных систем регулирования - Автоматические регуляторы