Формализация в терминах передаточных функций, Принцип работы системы и функциональная схема САР - Цифровая система автоматического регулирования температуры воды в баке
Принцип работы системы и функциональная схема САР
В данной работе рассматривается система автоматического регулирОвания температуры воды в баке. Схема САР представлена на рисунке 1.
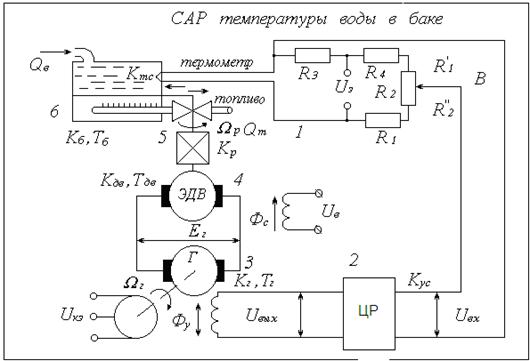
Рисунок 1 - Принципиальная схема САР температуры воды в баке
Поддержание постоянной температуры воды необходимо для работы многих устройств. В частности, необходимо поддерживать постоянную температуру воды в бассейне, котельной, аквариуме. Поэтому САР температуры воды в баке является важной составной частью многих устройств.
При поступлении новой воды в бак температура воды в нем может измениться. Значение температуры измеряется с помощью термопары. Измеренное с помощью термопары напряжение сравнивается с напряжением на выходе моста сопротивлений, которое формируется с учетом положения движка потенциометра. Разность этих напряжений является напряжением рассогласования, которое подается на вход усилителя. На выходе входной сигнал усиливается до значения.
Если данное напряжение не равно нулю, в обмотке возбуждения генератора Г будет протекать ток. При этом образуется магнитный поток ФУ, который действует на обмотки якоря генератора, вращающегося с частотой. При этом в обмотке индуцируется ЭДС. Под действием этого ЭДС устанавливается ток якоря, который подается в обмотку якоря двигателя, приходящей под действием тока обмотки возбуждения во вращение.
Угловая скорость вращения вала двигателя передается на вал редуктора. Редуктор -- это механизм, передающий и преобразующий вращающий момент. В данном случае угловая скорость на входном валу равна угловой скорости вращения вала редуктора, а скорость на выходном валу редуктора равна. Эта угловая скорость влияет на угол поворота вентиля, который влияет на поток топлива и поток теплоты. Под действием потока теплоты происходит нагрев воды в баке.
В состав данной САР входят:
- 1. Мост сопротивлений 2. Цифровой регулятор 3. Генератор 4. Двигатель 5. Редуктор 6. Бак с водой 7. Термопара
В составе схемы существуют различные типы элементов, каждый из которых выполняет свою функцию в системе. Элементами функциональной схемы являются:
Объект управления (6) - это элемент САР, управление поведением которого является целью создания системы автоматического управления. В данном случае объектом управления является бак с водой.
Измерительное устройство - это элемент САР, назначением которого является измерение значения управляемой величины. В данном случае управляемой величиной является температура, а измерительным устройством является термопара.
Задающее устройство - это элемент САР, который служит для задания необходимого значения управляемой величины. В данном случае задающим воздействием является напряжение Uз
Сравнивающее устройство - это элемент САР, служащий для сравнения значения управляемой величины с ее заданным значением. В данной схеме сравнивающим устройством является мост сопротивлений. Данное устройство выявляет разницу между напряжением термопары и заданным напряжением, на его выходе - сигнал рассогласования.
Цифровой регулятор (2) - это
Исполнительное устройство - это элемент САР, который воздействует на управляющий орган объекта. В данной схеме роль исполнительного устройства играют несколько элементов: генератор, электродвигатель, редуктор, задвижка для подачи топлива
Среди систем с импульсной модуляцией только системы с амплитудной модуляцией относятся к линейным системам (импульсные линейные системы). Системы, в которых выполняется дискретизация сигнала по уровню, принято относить к релейным системам; для их анализа и синтеза применяются методы теории непрерывных нелинейных систем. Цифровые системы, в которых выполняется квантование сигнала, как по времени, так и по уровню, могут исследоваться с помощью математического аппарата линейных импульсных систем при условии достаточно малой величины дискретизации уровня сигнала.
Для устранения нежелательных эффектов необходимо соблюдать следующие условия (3):
- - разрядность входных и выходных преобразователей, а также диапазон представления чисел в процессоре должен быть достаточно большим и соответствовать друг другу; - разрядность преобразователя непрерывной величины в код следует выбирать таким образом, чтобы его погрешность квантования была меньше статических и динамических ошибок датчика; - разрядность преобразователя кода в непрерывную величину целесообразно задавать такой, чтобы изменение управляющего сигнала на один шаг квантования вызывало после прохождения через непрерывную часть системы изменение кода в преобразователе непрерывной величины в код на единицу младшего разряда.
Проблемы обеспечения заданных показателей качества управления связано, в частности, с числом уровней квантования входного сигнала, который зависит как от энергетических характеристик, от алгоритма обработки информации, так и ограниченно соответствующими характеристиками преобразователей непрерывных сигналов в код и длиной разрядной сетки ремиконта.
В цифровых системах, как правило применяется простейшая форма выходных импульсов с ЦАП - прямоугольные импульсы, которые следуют со скважностью равнй 1. Выбор периода квантования соотносить с особенностями собственного движения ОУ внутри интервала квантования. Он должен быть таким, чтобы внутри него не было значительных колебаний переходного процесса. Чем меньше Т0, тем ближе дискретная система к непрерывной.
Похожие статьи
-
Описание функциональной схемы Рис 1. САР температуры сушильного шкафа Данная САР предназначена для управления температурой сушильного шкафа. Значит,...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
Обоснование способа описания исходной АСР Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
В ходе данной работы необходимо установить свойства системы автоматического управления, определить ее временные и частотные характеристики, а также...
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Уравнения состояния и основные передаточные функции замкнутой системы В данной работе рассматривается АСР, управление в которой организованно по принципу...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Оценим склонность к колебаниям и быстродействие системы по виду кривой переходного процесса в при типовом единичном ступенчатом воздействии. В этом...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Построение кривой переходного процесса является в большинстве сл Учаев весьма трудоемкой операцией. Поэтому целесообразно использовать методы,...
-
Рассмотрим ЛАЧХ и ЛФЧХ системы (рисунок 18): Рисунок 21 - ЛАЧХ и ЛФЧХ разомкнутой системы по каналу управления Исследуемая система устойчива, если ее...
-
По числу входных управляющих воздействий и выходных переменных ОУ по каналу "GТ - Тв" является Одномерным (одноканальным) , поскольку имеет один...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Измерение скорости вращения вала основано на подсчете количества импульсов пришедших с датчика за определенный промежуток времени. В нашем случае за 1...
-
По ходу плавки в электродуговую печь требуется подавать различное количество энергии. Менять подачу мощности можно изменением напряжения или силы тока...
-
Одним из первых вопросов, возникающих при исследовании и проектировании линейных систем управления, является вопрос об их устойчивости. Линейная система...
-
Исследование временных характеристик Для того, чтобы исследовать динамические свойства системы, рассмотрим временные и частотные характеристики системы....
-
Для управления установкой нами запроектирован микропроцессорный контроллер АК2 - РС301А, производства компании "Danfoss" (Дания). Общие сведения Основное...
-
Функциональная схема системы автоматизации приведена на рис. Э1. В дополнение к существующим подсистемам включены следующие: АСК концентрации входящей...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
Основные показатели качества регулирования - Автоматические регуляторы
К автоматическим системам регулирования предъявляются требования не только по устойчивости процессов регулирования во всем диапазоне нагрузок на объект,...
-
Описание работы принципиальной схемы - Электрооборудование механизма подъема мостового крана
Для начала работы электротехнический персонал собирает схему, включая автоматические выключатели QF1, QF2, QF3. Одновременно с подачей напряжения...
-
Проектируемая система адаптивного управления представляет собой комплексную систему автоматического регулирования, состоящую из двух подсистем,...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
АЧХ и ФЧХ функциональных элементов системы Амплитудная частотная характеристика (АЧХ) и фазовая частотная характеристика (ФЧХ) находятся по следующим...
-
Исследование качества САР - Цифровая система автоматического регулирования температуры воды в баке
Качество линейных САР принято характеризовать точностью и быстродействием их работы в переходном и установившемся режимах. И переходный, и установившийся...
-
ОБЩАЯ ХАРАКТЕРИСТИКА УСЛОВИЙ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ - Надежность систем автоматизации
Автоматические системы, а также их отдельные элементы при эксплуатации находятся под воздействием различных факто-ров, которые будем называть нагрузками....
-
Введение - Автоматическая система регулирования температуры сушильного шкафа
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса....
-
В процессе выполнения курсовой работы был произведен анализ САР температуры сушильного шкафа. В терминах передаточных функций были описаны все...
-
Определим запасы устойчивости по логарифмическим частотным характеристикам динамической системы, которые изображены на рисунке 26. Определим запас...
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Система автоматического управления это - комплекс устройств, предназначенных для автоматического изменения одного или нескольких параметров объекта...
Формализация в терминах передаточных функций, Принцип работы системы и функциональная схема САР - Цифровая система автоматического регулирования температуры воды в баке