Система автоматического управления электроприводом подъемной машины - Скиповой электропривод
Структурная схема САР
Структурная схема системы автоматического управления электроприводом постоянного тока по системе ТП-Д с последовательной коррекцией приведена на рис. 9
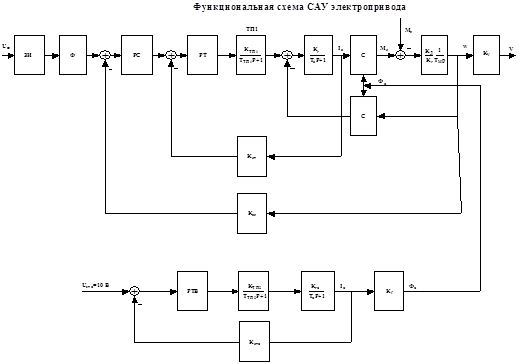
Рис. 9 Структурная схема САУ электроприводом по системе ТП-Д
Система управления имеет три контура регулирования: контур регулирования тока якоря, контур регулирования скорости и контур регулирования тока возбуждения. Контуры регулирования тока якоря и скорости построены по принципу последовательной коррекции, то есть каждый контур отрабатывает одну крупную постоянную времени. Все регуляторы - пропорционально интегральные, с настройкой на технический оптимум.
Контуры регулирования токов якоря и возбуждения построены на аналоговых элементах (операционных усилителях), что обеспечивает быстродействие системы и необходимые динамические характеристики. Контур регулирования скорости, как и дискретная часть системы управления (система защиты, блокировок и выбора режима), построен на базе микропроцессорной техники, что обеспечивает:
Точность задания скорости;
При необходимости, возможность изменения тахограммы движения программным путем;
Реализацию режима автоматического управления подъемом без прямого участия оператора (при отсутствии аварийных ситуаций);
Возможность непрерывного контроля всех параметров работы электропривода и ведения статистики их изменения;
Интеграция с другими подсистемами автоматизации.
Похожие статьи
-
Техническое задание на дипломный проект "Модернизация системы управления электроприводом и автоматики скипового подъема в условиях шахты "Комсомольская"...
-
Выбор системы электропривода - Скиповой электропривод
На шахтных подъемных машинах (ШПМ) мощностью свыше 2500 кВт в настоящее время используют электропривод постоянного тока. В течение длительного времени...
-
Система автоматического управления это - комплекс устройств, предназначенных для автоматического изменения одного или нескольких параметров объекта...
-
Системы автоматического регулирования, контроля и управления
Функциональные схемы систем автоматического регулирования, контроля и управления Под управлением понимают такую организацию процесса, которая...
-
Для обеспечения требуемых статических и динамических параметров определим требуемую структуру системы. Поскольку необходимо регулировать мощность...
-
Выбор подъемной машины - Скиповой электропривод
Диаметр барабана подъемной машины, м ,(2.14) Где C - коэффициент, зависящий от типа подъемной машины, для многоканатного подъема с отклоняющими шкивами C...
-
Весовые и переходные функции отдельных элементов Разомкнем единичную обратную связь и получим структурную схему разомкнутой системы (рисунок 5): Рисунок...
-
Основные передаточные функции исходной САР Найдем главный оператор замкнутой системы: оператор, связывающий главный вход, задающее воздействие, с главным...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Фазовая частотная характеристика определяет запаздывание выходного сигнала по отношению к входному. Найти зависимость фазы от частоты входного...
-
Введение - Автоматическая система регулирования температуры сушильного шкафа
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса....
-
Методы настройки двухсвязных систем регулирования - Автоматические регуляторы
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис.11). В таких системах даже при наличии устойчивой...
-
1. Исходные данные (вариант № 16) - схема технологической установки; - краткое описание реализуемого технологического процесса. 2. Обязательные разделы...
-
Статическое сопротивление можно определить по следующей формуле: ,(2.19) Где k - коэффициент, учитывающий вредные сопротивления, для скипов k = 1,15. Так...
-
Функциональная схема системы На основании исходных дифференциальных уравнений функциональную схему системы отработки заданного напряжения можно...
-
Введение - Анализ системы автоматического управления
Анализ линейных систем автоматического управления -- исследование влияния структуры, численных значений параметров и внешних воздействий на динамические...
-
Данную систему управления можно отнести к: 1. дискретно-непрерывной 2. Динамической 4. Стационарной 5. одномерной 6. Стохастической Приведенная выше...
-
Заключение, Список литературы - Анализ системы автоматического управления
Была проанализирована система дифференциальных уравнений. На основе анализа были составлены передаточные функции, на основании которых, была сформирована...
-
При линеаризации коэффициент при текущем напряжении определяется как производная от напряжения управления. Подставляя сюда установившееся значение...
-
По структурной схеме системы, приведенной на Рис. 6.1., составим математическую модель проектируемой системы для дальнейшего моделирования, которая...
-
Рассматриваемая ЭМС и ЭМС-аналог содержат асинхронный и шаговый (ШД) электродвигатели соответственно. Каждый из типов электродвигателей имеет свои...
-
При подборе оборудования учитывают показатели основных его свойств: потребительских, отражающих полезный эффект от использования...
-
Требования, предъявленные к регуляторам частоты вращения, зависят от условий эксплуатации систем регулирования в целом с учетом назначения двигателя и...
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
Системы автоматического управления точностью обработки деталей Обработка заготовок на станках с ПУ обеспечивает высокую степень автоматизации и широкую...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
В процессе выполнения курсовой работы был произведен анализ САР температуры сушильного шкафа. В терминах передаточных функций были описаны все...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Для исследования точности рассмотрим реакцию системы на типовое воздействие вида "Ступенька". Данное воздействие является одним из наиболее сложных для...
-
Управление качеством продукции - Системы качества по международным стандартам ИСО серии 9000
В 70-80-х годах ученые и специалисты многих стран пришли к выводу, что качество не может быть гарантировано только путем контроля готовой продукции. Оно...
-
В промышленности существует целый спектр оборудования необходимого для термической обработки металла. Это оборудование имеет многозонную организацию...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
Определение и классификация передаточных функций САУ - Анализ системы автоматического управления
Передаточная функция - один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой...
-
Изучение частотных характеристик типовых динамических звеньев систем автоматического управления
ЛАБОРАТОРНАЯ РАБОТА ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ САУ Передаточный автоматический система частотный Целью настоящей...
-
При создании и эксплуатации автоматических систем необхо-димо стремиться обеспечить заданную, а иногда и максимальную надежность системы при...
-
Введение - Цифровая система автоматического регулирования температуры воды в баке
Проблема автоматизации в различных отраслях народного хозяйства является в настоящее время одной из ключевых и ее решение относится к одному из...
-
Расчет силовой части электропривода и выбор оборудования - Скиповой электропривод
Выбор двигателя. В главе Специальной части данного проекта в п. 1.3 был предварительно произведен выбор двигателя, а пункте 1.7 произведена проверка...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
При выполнении данной работы была спроектирована система автоматизированного управления установкой для нейтрализации азотной кислоты аммиаком. Была...
-
Насосные установки для законтурного и внутриконтурного заводнения являются весьма энергоемкими. В связи с необходимостью непрерывной подачи воды при...
Система автоматического управления электроприводом подъемной машины - Скиповой электропривод