Расчет силовой части электропривода и выбор оборудования - Скиповой электропривод
Выбор двигателя.
В главе Специальной части данного проекта в п. 1.3 был предварительно произведен выбор двигателя, а пункте 1.7 произведена проверка двигателя по эквивалентному усилию. Окончательно принимаем двигатель со следующими паспортными данными табл.20:
Таблица 20 - Номинальные параметры двигателя
|
Параметр |
Значение |
Единица измерения |
|
Тип Номинальная мощность Номинальная скорость Напряжение якоря Ток якоря Напряжение возбуждения Ток возбуждения Номинальный момент Перегрузочная способность Момент инерции ротора КПД Ra La Rв Lв |
П2Ш-800-256-7КУХЛ4
|
- КВт Об / мин В А В А КН м Кг м2 Ом Гн Ом Гн |
Выбор тиристорных преобразователей.
Согласно схеме приведенной на рис. 5 в комплект электропривода входят тиристорный преобразователь ТП1.
Для цепи якоря Uн = 930 В, Iн = 5130 А, принимаем тиристорный преобразователь: со следующими параметрами табл21:
Таблица 21 - Параметры тиристорного преобразователя в цепи якоря ТП1
|
Тип агрегата |
Напряжение якоря, В |
Напряжение обмотки возбуждения, В |
Номинальный ток, А |
|
SIMOREG DC-MASTER 6RA70 |
950 |
220 |
2000 |
SIMOREG 6RA70 являются полностью цифровыми компактными преобразователями для подключения к сети переменного тока и служат для питания якоря и возбуждения приводов постоянного тока с изменяемой скоростью вращения. Диапазон номинального постоянного тока преобразователей простирается от 15 до 2000 А и может быть увеличен за счет параллельного включения преобразователей.
В данном проекте необходимо использовать три параллельно включенных тиристорных преобразователя. Силовая часть схемы подключения представлена на рис. 6.
Схема подключения
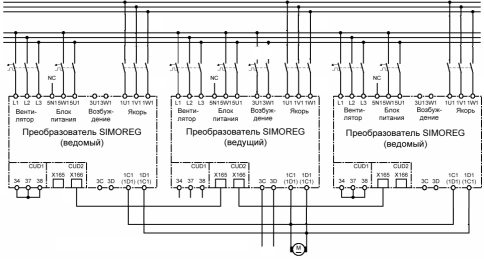
Рис. 6. Схема параллельного включения преобразователей SIMOREG
Схема управления представлена на рис.7
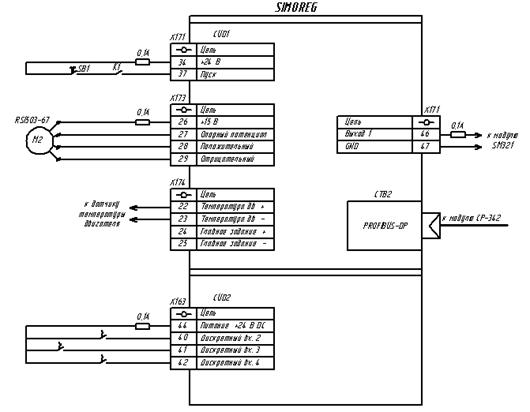
Рис. 7 Схема управления
Описание схемы.
Схема управления включает следующие цепи:
К клемме Х171 подключена кнопка пуск SB1. При нажатии на кнопку пуск, при наличие разрешающего сигнала от контроллера технологической защиты Siemens Simatic S7-300, напряжение 24В с клеммы 34 поступает на клемму 37 и происходит запуск привода.
К клемме Х174 подключается инкрементальный инкодер PSI503-67 используемый в качестве датчика скорости двигателя.
К клемме Х174 подключается датчик температуры двигателя.
От Х171 из контактов 46-47, при возникновении неисправности преобразователя, формируется сигнал низкого уровня, который поступает на дискретный вход контроллера Siemens Simatic S7-300 в модуль SM 321-1.
Для интеграции тиристорного преобразователя с контроллером технологических защит предусмотрено оснащение преобразователя коммуникационным модулем CBP2, который реализует интерфейс передачи данных Profibus-dp, при этом контроллер является ведущим, а преобразователь ведомым.
Для подключения к преобразователю сигналов, о положении скипа в стволе, поступающих от концевых выключателей предусмотрена плата расширения COD2. Концевые выключатели подключаются к клеммам 40-42 разъема Х163. При срабатывании концевого выключателя соответствующий контакт замыкается и напряжение питания с контакта 44 поступает на соответствующий дискретный вход преобразователя.
Переход между ступенями скорости производится автоматически при достижении скипа соответствующего положения.
Выбор преобразовательных трансформаторов.
Для питания тиристорных преобразователей принимаем трансформаторы табл22:
Для ТП1: UВН = 6 кВ, UНН = 1050 В, Sн = 6300 кВА.
Таблица 22 - Параметры преобразовательного трансформатора ТР1
|
Тип |
SН, кВА |
UВН, В |
UНН, В |
|
ТСЗП-6300/6 |
6300 |
6000 |
1050 |
Выбор быстродействующего выключателя.
Принимаем быстродействующий выключатель постоянного тока (А2 на рис. 7.) со следующими параметрами 23:
Таблица 23 - Параметры быстродействующего выключателя
|
Тип |
Номинальное напряжение, В |
Номинальный ток, А |
Отключаемый ток, А |
Время Отключения, с |
|
ВАБ-28-6000/30-ЛУ4 |
1650 |
6000 |
27000 |
0,02 |
Приведение момента нагрузки к валу двигателя
Так как применяется безредукторный привод, то приведение момента нагрузки к валу двигателя осуществляется :

.(2.60)
Для i-го периода диаграммы усилий:

.
Таблица 24 - Приведение момента нагрузки к валу двигателя табл.24
|
Период |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
Пауза |
|
T, C |
|
|
|
|
|
|
|
|
|
M, КН м |
895,5 |
746,8 |
1119,3 |
746,8 |
347,5 |
746,8 |
597,8 |
0 |
Диаграмма изменения момента нагрузки на валу двигателя рис. 8
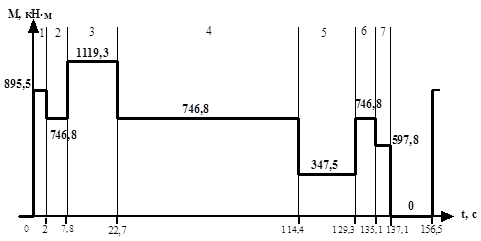
Рис. 8 Диаграмма изменения момента нагрузки на валу двигателя
Приведение момента инерции системы к валу двигателя.
Зная приведенную массу системы (см. п. 1.6) суммарный момент инерции системы можно определить по формуле:

. (2.61)
кгм2

Похожие статьи
-
Выбор системы электропривода - Скиповой электропривод
На шахтных подъемных машинах (ШПМ) мощностью свыше 2500 кВт в настоящее время используют электропривод постоянного тока. В течение длительного времени...
-
Расчет подъемной установки, Выбор подъемных сосудов - Скиповой электропривод
Угольный скиповой подъем шахты оборудован двумя многоканатными подъемными машинами МК - 5 х 1 со скипами, грузоподъемностью 30 тонн и противовесами....
-
Для вводного кабеля: В; Кабель проходит проверку по потере напряжения, т. к. потеря напряжения не должна превышать 300 В. Для ФКУ: В; Кабель проходит...
-
Выбор подъемной машины - Скиповой электропривод
Диаметр барабана подъемной машины, м ,(2.14) Где C - коэффициент, зависящий от типа подъемной машины, для многоканатного подъема с отклоняющими шкивами C...
-
Расчет мощности и выбор электродвигателей установки Асинхронные электродвигатели для привода формовочной машины выбирают так, чтобы обеспечить наилучшее...
-
Расчет и выбор аппаратов пуска, управления и зашиты - Построение металлорежущего станка
Электрические аппараты широко используются в системах электроснабжения предприятий и организаций для управления электродвигателями и другим...
-
Электрическая схема электроснабжения подъемных установок скипового ствола приведена на рис. 1 Рис. 1 Схема электроснабжения подъемных установок скипового...
-
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором...
-
Статическое сопротивление можно определить по следующей формуле: ,(2.19) Где k - коэффициент, учитывающий вредные сопротивления, для скипов k = 1,15. Так...
-
Выбор канатов - Скиповой электропривод
Расчетная схема имеет вид: Рис. 2 Расчетная схема для расчета канатов Здесь H0 =1331 м, h'=51 м, hХ = 25 м, H = 1255 м, hП = 20 м, hЗ = 21 м, HШ = 1214....
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Выбор системы электропривода - Электропривод механизма передвижения тележки козлового крана
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. В настоящее время на кранах применяют простые системы...
-
При выборе проводов, вида электропроводки и способа прокладки проводов и кабелей должны учитываться требования электробезопасности и пожарной...
-
Выбор посадок гладких цилиндрических соединений Для гладких цилиндрических соединений, расположенных на тихоходном валу, обосновать выбором системы,...
-
Выбор объекта для сравнения В дипломном проекте разрабатывалась новая система электропривода на базе комплектного тиристорного преобразователя серии...
-
Расчет мощности электродвигателя привода мостового крана по нагрузочному графику и выбор электродвигателя в каталоге Исходными данными проектирования...
-
Общие сведения о режиме сварки Режимом сварки называют основные показатели, определяющие процесс сварки, которые устанавливаются на основе исходных...
-
В электроприводах главного движения токарных станков согласно [11] мощность электродвигателя определяется требуемой мощностью резания. Для определения...
-
Выбор оборудования Выбираю вертикально сверлильный станок модели 2Н135. Станок предназначен для сверления, рассверливания, зенкерования, развертывания...
-
Расчет дефлегматора В дефлегматоре конденсируется бензол с небольшим количеством толуола. Температура конденсации паров дистиллята t1=80,8°С. Температуру...
-
При размещении оборудования руководствовались технологическими, техническими требованиями и регламентированными нормами. При выборе варианта компоновки...
-
Введение, Выбор двигателя, кинематический и силовой расчет привода - Детали машин
В данном курсовом проекте необходимо разработать привод по заданной схеме. Привод этого механизма включает в себя электродвигатель, соединенный...
-
Схема размещения технологического оборудования - это расположение технологического оборудования и рабочих мест на производственной площади. В курсовом...
-
Выбираю преобразователь КТЭ 320/220 А (440 В) Семейство продуктов КТЭ Тип изделия или компонента Привод с регулируемой частотой вращения Специальное...
-
Теплопередающая поверхность приборов охлаждения, м2 Fво=Qоб/k-Дt Где Qоб - тепловая нагрузка на камерное оборудование, Вт ; К - коэффициент теплопередачи...
-
В качестве электрической схемы генератора тактовых импульсов выберем мультивибраторный вариант его построения на биполярных транзисторах, которые...
-
Выпрямитель универсальный для сварки неплавящимся электродом модели ВСВУ-400 предназначен для питания установок автоматической, полуавтоматической и...
-
Для гидроприводов подъемно-транспотных машин выбирают номинальное давление в диапазоне МПа. В нашей гидросистеме выберем МПа. Перепад давления на...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Исходные данные Мощность электродвигателя Р1 = 1500 об/мин, N1 = nДв Кинематический расчет Р2 = Р1 - ? ; Р2 = 30 -0,96 = 28,8 кВт, Где ? - кпд,...
-
Аппаратом защиты называется устройство, которое автоматически отключает защищаемую электрическую цепь при ненормальных режимах. К аппаратам защиты...
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Для того чтобы механизм правильно функционировал необходимо произвести правильный выбор конструкционных материалов. Материалами валов, осей обычно...
-
Структурная схема контура скорости приведена на Рис. 5.7. Контур мощности будем рассчитывать на стабилизацию уровня мощности резания в пределах 90 5%...
-
Расчет заземления, Меры безопасности при подъеме и спуске людей - Скиповой электропривод
Для заземления электрооборудования участка применяем одиночный местный заземлитель, выполненный в виде полосы 200х300 см погруженной на 20 см в сточную...
-
Выбор типа дробильного оборудования производят исходя из того, что дробилки, устанавливаемые на последовательных стадиях дробления, должны быть увязаны...
-
Выбор и расчет необходимого количества оборудования На основании производительности, характеристики производства, горно-технических и горно-геологических...
-
Расчетная плотность нефти при температуре Т=ТР определяется по формуле Где - температурная поправка, кг/(м3-К), =1,825 - 0,001315293 ; 293 - плотность...
-
Основанием для определения потребного количества оборудования является разработанная схема подготовки зерна к помолу. При подсчете числа машин и...
-
Крановые защитные панели: Крановые защитные панели применяют при контроллерном управлении двигателями крана, а также вместе с некоторыми магнитными...
Расчет силовой части электропривода и выбор оборудования - Скиповой электропривод