Конструкция шагающих механизмов землеройных машин - Исследование силовых и кинематических параметров четырехопорного шагающего механизма передвижения
Шагающее ходовое оборудование современных экскаваторов-драглайнов состоит из двух самостоятельных систем опорных поверхностей - базы (опорной рамы) и лыж (опорных башмаков). При работе машины база является основной опорной поверхностью, она воспринимает нагрузки от поворотной части машины и передает на них грунт. База представляет собой круглую плиту, состоящую из системы пересекающихся поперечных и продольных балок, закрытых нижними и верхними листами настила.
Передвижение машин, оборудованных шагающим ходом, осуществляется периодическими перемещениями их каждый раз на величину шага. За цикл движения механизмы обеспечивают подъемом и перенос вперед лыж, посадку лыж на грунт и отрыв базы от него, передвижения вперед всей машины, посадку базы и отрыв лыж от почвы. Прямолинейное движение машины происходит по направлению ее продольной оси вдоль стрелы. Изменение направления движения достигается поворотом вращающейся части машины при поднятых лыжах, при этом изменяется направление продольной оси. шагающий механизм передвижение экскаватор
Все конструкции механизмов движения выполняются в виде кривошипных систем: кривошипно-эксцентриковый, кривошипно-шарнирный с треугольной рамой, кривошипно-шарнирный крейцкопфний, подъемное, эксцентриковый с задней серьгой, эксцентриковый с верхней серьгой, кривошипно-колесный, двухкривошипный. Исключение составляют экскаваторы Уралмашзавода и экскаватор 4550-W фирмы "Бюсайрус-Ири", оборудованные гидравлическими шагающими механизмами.
На рисунке 4.1 приведены схемы механизмов движения и показано положение звеньев механизмов в различные моменты цикла передвижения. Кривошипно-эксцентриковым шагающим ходом оборудован экскаватор ЕК-4/40 ПАО "НКМЗ". При кривошипно - ексцентриковым ходе эксцентрики установлены на концах главного ходового вала и удерживаются ребордами в литых разборных эксцентриковых рамах, каждая из которых установлена на лыжи. К раме прикреплены отливки с направляющими для пальца кривошипа с эксцентриком.
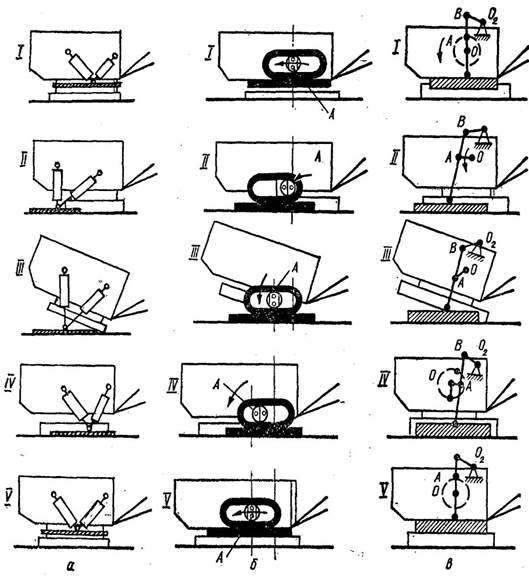
Рисунок 4.1. Схемы механизмов движения:
А - рычажно-гидравлического; б - эксцентрикового; в - кривошипно-рычажного с провушиной; I-V - последовательность перемещения механизма движения
Лыжи (опорные плиты) предназначены для опирания машины на грунт при передвижении и представляют по своей конструкции металлоконструкцию в виде балки, сваренную из продольных вертикальных листов, связанных ребрами жесткости и усиленных горизонтальными листами верхнего и нижнего настилов. Нагрузка воспринимается лыжей в виде сосредоточенной силы, проходящей через центр опоры (ноги) шагающего механизма. На опорной плоскости лыжи поперечные ребра (шпоры, иногда их называют грунтозацепами), улучшающие сцепление лыжи с грунтом при передвижении машины.
В ходовых устройствах мощных экскаваторов-драглайнов довольно часто используется кривошипно-шарнирный механизм движения, схема которого представлена на рисунке 4.2.
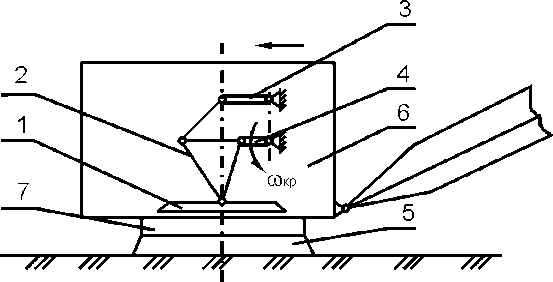
- 1 - опорный башмак; 2 - нога; 3 - шатун; 4 - кривошип; 5 - опорная база; 6 - поворотная платформа; 7 - опорно-поворотное устройство
Рисунок 4.2 - Кривошипно-шарнирный механизм движения
Положение I характеризует опускания лыж на опорную поверхность почвы. Усилия от веса экскаватора при этом воспринимает опорная поверхность базы 5.
Положение II соответствует подъемной базе и сдвигу ее влево на величину шага. Нагрузка от веса экскаватора при этом передается на опорную поверхность лыж и частично на базу.
Положение Ш соответствует опусканию базы.
Положение IV - лыжи поднимаются и смещаются влево. Нагрузка от веса экскаватора при этом вполне воспринимает база.
При вращении кривошипного вала 4 нижняя опорная точка (пятая) ноги 2 описывает сложную замкнутую кривую (рисунок 4.3), геометрические параметры которой зависят от радиусов кривошипа, рычага, соотношение бок ноги а, b, c и расстояния между осью вращения кривошипа и рычага е.
Если на высоте h от нижней точки P полученной кривой провести горизонталь, то длина отрезка [m-n] будет соответствовать теоретическому шаговые экскаваторов.
Высота h принимается равной расстоянию от пятки ноги к опорной поверхности лыжи. Если нижняя точка P кривой смещена относительно опорной поверхности базы, то высоту h необходимо скорректировать на величину h0.
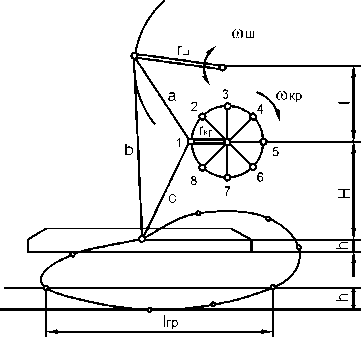
Рисунок 4.3 - Расчетная схема графического определения длины хода шагающего экскаватора
Похожие статьи
-
В современных транспортных и горных машинах в качестве механизмов передвижения применяются рельсовые, пневмоколесные, гусеничные и шагающие движители,...
-
Изучение технологических параметров дорожных машин
КОНТРОЛЬНАЯ работа По дисциплине: Строительные машины На тему: Изучение технологических параметров дорожных машин Исходные данные для выполнения работы...
-
Заключение - Расчет машин для проведения аварийно-спасательных работ
При выполнении курсовой работы были приобретены навыки расчета машин для ведения аварийно - спасательных работ. Были рассчитаны силы сопротивления...
-
ДЕЙСТВИЯ МЕХАНИЗМОВ ТОКОПРИЕМНИКОВ ПРИ ПОДЪЕМЕ И ОПУСКАНИИ - Типы и назначение токоприемников
Условия необходимые для подъема токоприемников: Ш напряжение в цепях управления не менее 35 В и давление сжатого воздуха в пневматической цепи управления...
-
Построение эпюр силовых факторов Для начала подбора сечений необходимо определить расчетные схемы стабилизатора и оси и нагрузки, действующие на них....
-
Щебнеочистительные машины СЧ-600 и СЧ-601 имеют одинаковую конструктивную схему и различаются только модернизацией некоторых узлов и дополнениями,...
-
Деталь -- изделие из однородного материала (по наименованию и марке), выполненное без применения сборочных операций. Деталь, с которой начинается сборка...
-
Техника безопасности при работе машины, Список литературы - Путевые машины
СЧ-600 работает в условиях движения поездов, на участках где выполняется комплекс путевых работ с участием бригад путевых рабочих. Для безопасности и...
-
Щебнеочистительная машина RM-80 UHR фирмы "Plasser-Theurer" (Австрия) выполнена в самоходном варианте и предназначена для железнодорожного пути и...
-
В результате сползания грунта образовался завал на проезжей части автомобильной дороги, для разбора завала привлекается землеройная и транспортная...
-
Скорости движения - Технические основы создания машин
Скорости движения автогрейдера определяют в значительной мере его производительность. Величина скорости обычно ограничивается в рабочем режиме...
-
Устройство коробки передач Т-40 Механическая коробка передач трактора состоит из ходоуменьшителя, валов и шестерен, конической передачи с механизмом...
-
Расчет производительности ПРМ Производительность ПРМ - это количество груза переработанное ПРМ за единицу времени. Различают теоретическую, техническую и...
-
Назначение трансмиссии и ее общие данные Трансмиссия или силовая передача, служит для передачи крутящего момента от коленчатого вала двигателя к ведущим...
-
Авт 1 Авт 2 Внешняя скоростная характеристика N e max =70,8кВт(3800) M e max =211,6Нм(2200) N e max =74,6кВт(2400) M e max =220Нм(4000) Вывод: Тяговой и...
-
Определение мощности двигателя Мощность двигателя можно определить КВт (1) = = 90,90 кВт Где GA - полный вес автомобиля, Н: GA = G0+ GГ, GA = 1360+550...
-
Ремонт рулевого управления КАМАЗ 5320, Рулевой механизм - Перспективы развития автомобилестроения
Рулевой механизм В процессе эксплуатации автомобиля происходит износ рабочих поверхностей деталей рулевого управления. Для установления степени износа и...
-
Передача информации при комбинированном методе - Конструкция самолетов
Самолетостроение конструктивный плаз геометрический По мере развития программно-технических средств и опыта использования современных компьютерных...
-
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ Заданием на письменную экзаменационную работу было предложено описать назначение и конструкцию ударно-сцепных устройств электровоза,...
-
Расчет коэффициента динамичности, Список литературы - Технические основы создания машин
Максимальная приведенная нагрузка в полиспасте при разгоне подвешенного груза: (18) Величина коэффициента динамичности: (19) Список литературы...
-
Оптическая система и измерительный механизм - Устройство гравиметров и работа с ними
В гравиметрах ГНУ-КС и ГНУ-КВ для измерения угла отклонения маятника применяется так называемый компенсационный способ, суть которого заключается в...
-
Второе условие. Мощности двигателя должно быть достаточно для обеспечения движения автогрейдера с максимальной транспортной скоростью VТ тах = 8,3...12,5...
-
Основной по популярности машиной‚ используемой на строительных площадках для производства земляных работ‚ перегрузки сыпучих и кусковых материалов и...
-
Требования разрабатываются исходя из назначения, условий работы узла. Крепление ЦПГО к фюзеляжу представляет собой соединение двух агрегатов самолета. К...
-
Схема усилительного каскада на полевом транзисторе с управляющими p-n-переходом и каналом р-типа показана на рисунке 5. Транзистор включен по схеме с...
-
Токоприемник. Конструкция и принцип действия - Типы и назначение токоприемников
Токоприемник служит для передачи электрической энергии от контактного провода к оборудованию электропоезда. На электропоездах установлены токоприемники...
-
Самосвал автомобиль экскаватор уклон Согласно варианту 12 исходными данными для определения сопротивления копания грунта бульдозером являются: марка...
-
Введение - Расчет машин для проведения аварийно-спасательных работ
Целью курсовой работы приобретение навыков для расчета машин для проведения аварийно - спасательных работ. В комплекте "экскаватор - автосамосвал"...
-
Описание конструкции узла Назначение. Масляная система (система смазки) дизеля на тепловозе выполняет несколько функций. Главная из них--поддержание...
-
Схема транзисторного усилителя низкой частоты Упрощенная схема каскада, выполненного на биполярном транзисторе типа р-n-р, включенного по схеме ОЭ,...
-
Расчетные режимы и нагрузки Нормы устанавливают два основных (I и III) и один дополнительный (II) расчетные режимы. По I расчетному режиму...
-
Основными компонентами таких стендов обычно являются: два взаимонезависимых комплекта роликов, размещенных в опорно-воспринимающем устройстве...
-
Изобразить семейство статических входных и выходных характеристик заданного транзистора, соответствующих схеме с ОЭ. Определить h - параметры...
-
Хоппер вагон перевозка цемент Технические характеристики Грузоподъемность, т 78,88 Тара, т 18,62 Полезный объем, м3 60,5 База вагона, м 7,7 Длина, м: -...
-
Планировка оборудования рабочих мест в отделе геометрической информации с использованием вычислительной техники Рабочее место инженера-конструктора...
-
Для сравнительного анализа предварительно составим схемы увязки технологической оснастки как базовым (рисунок 36), так и проектируемым (рисунок 37)...
-
Короткобазные автомобили самосвалы. Принцип работы подъемного механизма кузова
Самыми распространенными типами специализированного подвижного состава при грузовых автомобильных перевозках навалочных грузов являются...
-
Рулевые механизмы делятся на: Узлы типа "глобоидальный червяк - ролик" Соединенный с рулевым валом червяк переменного диаметра передает усилие на ролик;...
-
Определение основных параметров автогрейгера, Масса автогрейдера - Технические основы создания машин
Основными параметрами автогрейдера являются мощность двигателя, колесная формула, размер шин, первая расчетная рабочая скорость и максимальная расчетная...
-
1,2- дисковые передние тормоза. 3-контур передних тормозов 4-главны тормозной цилиндр 5-вакумный усилитель 6-педаль тормоза 7-контур задних тормозов...
Конструкция шагающих механизмов землеройных машин - Исследование силовых и кинематических параметров четырехопорного шагающего механизма передвижения