Ход работы, Вывод - Исследование силовых и кинематических параметров четырехопорного шагающего механизма передвижения
Таблица 5.1 - Значения основных геометрических параметров кривошипно-шарнирного механизма
|
Н, Мм |
А, Мм |
B, Мм |
C, Мм |
, Мм |
, мм |
, мм |
Е, Мм |
H+ Мм |
L, мм |
Погрешность | |
|
L1 |
L2 | ||||||||||
|
180 |
157 |
300 |
170 |
35 |
100 |
90 |
130 |
200 |
185 |
175 |
5% |
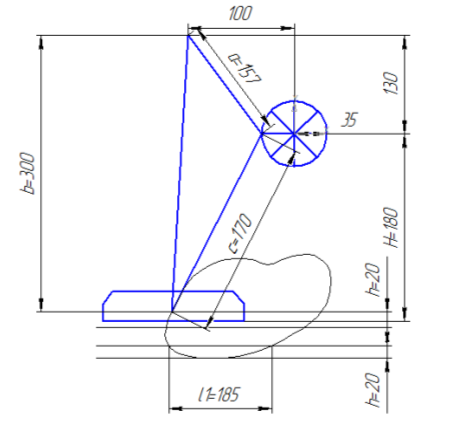
Рисунок 4.4 - Расчетная схема графического определения длины хода шагающего экскаватора
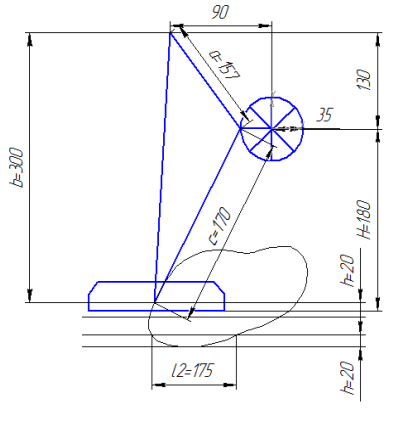
Рисунок 4.5 - Расчетная схема графического определения длины хода шагающего экскаватора
Вывод
В ходе лабораторной работе изучили конструкции и принцип работы четырехопорного шагающего механизма, определили длину хода шагающего экскаватора и построили схемы (рис. 4.4, 4.5,).
Похожие статьи
-
Шагающее ходовое оборудование современных экскаваторов-драглайнов состоит из двух самостоятельных систем опорных поверхностей - базы (опорной рамы) и лыж...
-
В современных транспортных и горных машинах в качестве механизмов передвижения применяются рельсовые, пневмоколесные, гусеничные и шагающие движители,...
-
Схема транзисторного усилителя низкой частоты Упрощенная схема каскада, выполненного на биполярном транзисторе типа р-n-р, включенного по схеме ОЭ,...
-
Определение чувствительности производится с помощью измерительного генератора, уровень входного сигнала которого или нормирован с допускаемой для поверки...
-
Параметры синтезируемого автомата. Значения сигналов:a, ay.............00 b, by.............01 c, cy.............11 d, dy.............10 Используемые...
-
Определение необходимого числа ПРМ может выполняться двумя способами: 1. по обеспечению выполнения заданных объемов работы и структуры ремонтного цикла;...
-
Выбор средств погрузки - разгрузки - Организация перевозки угля посредством грузового автомобиля
При выборе ПРМ учитывают условия работы грузопункта, род имеханизмы. груз транспортный погрузка перевозка Для погрузки массовых навалочных грузов...
-
Исследование рупорных антенн Цель работы: Практическое исследование направленных свойств рупорных антенн с использованием программы SABOR. Исследование...
-
При воздействии на вход типового каскада радиоканала полезного сигнала и белого шума главной задачей является оценка помехоустойчивости системы. В нашем...
-
В состав лабораторной установки входят: - аналоговая вычислительная машина МН-10, на лицевой панели которой набрана электронная модель следящей системы;...
-
Увеличение точности систем автоматического управления за счет повышения общего коэффициента усиления разомкнутой системы (или добротности) возможно при...
-
Механизм работы магнитостатического экрана заключается в шунтировании силовых линий магнитного поля. Где поставить экран? по возможности вблизи...
-
Схема усилительного каскада на полевом транзисторе с управляющими p-n-переходом и каналом р-типа показана на рисунке 5. Транзистор включен по схеме с...
-
Устройство коробки передач Т-40 Механическая коробка передач трактора состоит из ходоуменьшителя, валов и шестерен, конической передачи с механизмом...
-
На основании разработанных этапов работы алгоритма спектрального вычитания и в соответствии ГОСТ 19.701-90 (ИСО 5807-85) "Схемы алгоритмов, программ,...
-
Применительно к разработанному плану участка (отделения), вынесенному на лист чертежа, в пояснительной записке излагаются вопросы организации...
-
Выбор рабочей длины волны Форма и длительность оптических импульсов. Оптические импульсы характеризуются зависимостью: P(t)=P0F(t) Длительность импульсов...
-
В соответствии с технологическим регламентом ремонт кузова автобуса будет производится по схеме представленной в таблице 2. Таблица 12. Расчет...
-
Продольный профиль линии представляет собой изображение в вертикальной плоскости оси железнодорожной линии и поверхности земли. Проектная линия...
-
Схема технологического процесса на зоне представлена на рисунке 2. Основные маршруты Возможные маршруты Маршруты выборочного диагностирования Рисунок 2 -...
-
Расчет надежности микрофарадометра - Особенности работы микроконтроллера
В таблицу 3.1.4 заносятся данные из принципиальной схемы. Таблица заполняется по колонкам. В 1-ую колонку заносится название элемента, его тип...
-
В соответствии с п. п. 4.5.3 Методических рекомендаций для судебных экспертов "Исследование автомототранспортных средств в целях определения стоимости...
-
Построение эпюр силовых факторов Для начала подбора сечений необходимо определить расчетные схемы стабилизатора и оси и нагрузки, действующие на них....
-
Метод эмпирических коэффициентов - Нормирование маневровой работы подвижного состава
Данный метод получил наибольшее распространение. Результаты хронометражных наблюдений в последующем выражаются эмпирическими зависимостями....
-
Таблица 8 ИТОГО: Стоимость узлов и деталей: 60 006,98 Процент к стоимости запчастей (на мелкие детали) (%): 2,00 Стоимость узлов и деталей с учетом...
-
Электрическое и магнитное поля рассматривают как квазистатические. Картины электрического и магнитного полей при соответствующих частотах, и картины...
-
Следующим типом интегрирующего АЦП с частотно-импульсным преобразованием, принцип работы которого основан на предварительном преобразовании входного...
-
Интегральные микросхемы Цель работы Изучение принципов построения логических цепей на интегральных микросхемах, практическая сборка этих цепей и...
-
Выводы о проделанной работе - Проектирование фильтров нижних частот
В данной курсовой работе мы рассчитали ФНЧ по рабочим параметрам. Метод синтеза по рабочим параметрам позволил получить электрический фильтр с меньшим...
-
&;nbsp;Порядок выполнения работы, Контрольные вопросы - Оcновы радиоэлектроники
4.1 Собрать схему по рис. 4, подключив параметрический стабилизатор напряжения. 4.2 Снять зависимости UВых (UВх) при трех значениях переменного...
-
Расчет параметров открытой площадки по допускаемым нагрузкам Исходными данными для определения основных параметров площадки (вместимость, длина, ширина,...
-
Для успешного функционирования экономики любого государства необходимо наличие в нем развитого железнодорожного транспорта. Он обеспечивает стабильное...
-
Опасным производственным фактором называется такой производственный фактор, воздействие которого на работающего в определенных условиях ведет к травме...
-
Короткобазные автомобили самосвалы. Принцип работы подъемного механизма кузова
Самыми распространенными типами специализированного подвижного состава при грузовых автомобильных перевозках навалочных грузов являются...
-
Таблица 9 Схема проведения работ №пп Наименование работы Время работы Мастера Оборудования 1. Мойка, диагностирование неисправностей 15мин. 15мин. 2....
-
При разработке производственной структуры путевого хозяйства было установлено, что для данной дороги требуется 8 ПЧ, 3 ПМС. Также мы определили :...
-
Работа технологического оборудования - Проект автоцистерны для перевозки светлых нефтепродуктов
Проектируемая автоцистерна может выполнять следующие операции: - наполнять цистерну топливом своим насосом; - выдавать фильтрованное топливо потребителю...
-
Динамические параметры - Последовательный интерфейс сигма-дельта АЦП
Возникновение динамических погрешностей связано с дискретизацией сигналов, изменяющихся во времени. Можно выделить следующие параметры АЦП, определяющие...
-
Расчет показателей использования локомотивов выполнен в таблице 1.6. Таблица 1.6 - Показатели использования локомотивов Наименование показателя и...
-
Рис. 4.2.1. Временная диаграмма работы системы с РОС-ОЖ Расчет параметров систем с ОС и ожиданием 4.3.1 Построить временные диаграммы для системы с...
Ход работы, Вывод - Исследование силовых и кинематических параметров четырехопорного шагающего механизма передвижения