Подбор настроек ПИ-регулятора, Моделирование ПИ-регулятора. - Выбор настроек и анализ замкнутой системы регулирования с ПИ-регулятором
Моделирование ПИ-регулятора.
Уравнение ПИ-регулятора записывают следующим образом:
(8)
Где
Yрег - выходная величина регулятора;
X = ( x - x3 ) -
Входная величина регулятора, - рассогласование, - разница между текущим значением регулируемой величины x и заданием x3;
S1, S0 - настройки регулятора соответственно пропорциональная и интегральная части.
На рис. 1 показан ПИ-регулятор, собранный на элементах, взятых из библиотек пакета Simulink. Сумматор Sum1 является компаратором, т. е. устройством, сравнивающим текущую величину x(t) с заданием x3. Следует иметь в виду, что знак суммирования величины x3 должен быть противоположен знаку суммирования x(t).
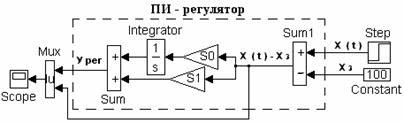
Рис. 1
Пример 3.
Пусть регулятору следует поддерживать величину + 76.4 оС. В этом случае величина задания будет х3 = 76.4, поданное на вход сумматора со знаком " - ". На рис. 1 величина задания, реализованная на элементе
Константа (Constant), x3 = 100, поэтому следует изменить ее на величину x3 = 76.4. Тогда действительно, если текущая величина x ( t) = 76.4, т. е. равна величине задания, то на выходе сумматора Sum1 рассогласование x = 0. Если x(t) > 76.4, то x(t) > 0, если x(t) < 76.4, то x(t) < 0.
Пропорциональное и интегральное воздействия регулятора складываются на Cумматоре2 (Sum2), на выходе которого получается выходная величина регулятора y рег.
Все коэффициенты в схеме на рис. 1, кроме S1 и S0, постоянные и равны 1. Если S1 = 0, то получается
И-регулятор, если, наоборот, S0 = 0, - П-регулятор.
Задание. Установить (через рабочую область MatLab) S1 = 1 и S0 = 0.1. параметры скачка элемента Step установить следующие: время скачка - 3 с, начальное значение 76.4, конечное значение 60.0.
Запустить модель и наблюдать на осциллографе переменную yрег(t). После окончания моделирования, поменять произвольным образом величины настроек S1 и S0, снова запустить модель и наблюдать y рег(t).
Похожие статьи
-
Пусть необходимо подобрать оптимальные настройки для объекта с передаточной функцией (9). Степень затухания, к примеру, ш= 0.75. Ниже даются рекомендации...
-
Зададимся целью подобрать такие настройки S1 и S0, чтобы переходный процесс в замкнутой САР был оптимальным. Сразу возникает вопрос, что подразумевают...
-
Пусть к примеру необходимо стабилизировать ПИ-регулятором объект с передаточной функцией (9) Составляем структурную схему моделирования в среде Simulink...
-
Целью работы является моделирование на ПЭВМ с помощью инструментария Simulink замкнутой системы автоматического регулирования (САР) по заданному...
-
Литература - Выбор настроек и анализ замкнутой системы регулирования с ПИ-регулятором
1. Бесекерский, В. А. Теория систем автоматического управления : [Учебное издание] / В. А.Бесекерский, Е. П.Попов.-- 4-е изд.,перераб. и доп. -- СПб. :...
-
Описание блоков SimEvents в программе Matlab - Моделирование систем
Time-Based Entity Generator (Раздел Generators/Entity Generator.) - блок генерирует сущности в моменты времени, определяемые входным сигналом или...
-
В большинстве реальных больших систем не обойтись без учета "состояний природы" -- воздействий Стохастического типа, случайных величин или случайных...
-
Моделирование системы в условиях неопределенности - Основы теории систем и системного анализа
Как уже отмечалось в первой части нашего курса, в большинстве реальных больших систем не обойтись без учета "состояний природы" -- воздействий...
-
СПОСОБЫ ОПИСАНИЯ СТРУКТУР. МОРФОЛОГИЯ СОЦИАЛЬНО-ПОЛИТИЧЕСКОЙ И ЭКОНОМИЧЕСКОЙ СФЕР Структурное моделирование. Структурный анализ Основная цель...
-
Моделирование. Детерминизм. Требования к моделированию В процессе исследования объекта часто бывает нецелесообразно или даже невозможно иметь дело...
-
Выбор математической формы функции при моделировании зависимости выпуска продукции от производственных факторов Постановка проблемы. Одним из важнейших...
-
Элементы матричного анализа - Методы решения системы линейных уравнений
Вектором, как на плоскости, так и в пространстве, называется направленный Отрезок , то есть такой Отрезок , один из концов которого выделен и называется...
-
Моделирование в условиях противодействия, игровые модели - Основы теории систем и системного анализа
Как уже неоднократно отмечалось, системный анализ невозможен без учета взаимодействий данной системы с внешней средой. Ранее упоминалась необходимость...
-
В результате выполнения курсовой работы были достигнуты следующие результаты: - изучены методы построения имитационных моделей реальных экономических...
-
Методы непараметрической статистики - Основы теории систем и системного анализа
Использование классических распределений случайных величин обычно называют "параметрической статистикой" - мы делаем предположение о том, что...
-
Оценим уравнение объема отгруженных инновационных товаров и услуг на основании данных, взятых из сборников Росстата "Россия. Статистический справочник" и...
-
При анализе инновационной активности региона важно понимать, как те или иные экономические данные влияют на инновационные показатели. В качестве...
-
Метод Монте-Карло используют для вычисления интегралов, в особенности многомерных, для решения систем алгебраических уравнений высокого порядка, для...
-
В настоящее время нельзя назвать область человеческой деятельности, в которой в той или иной степени не использовались бы методы моделирования. Особенно...
-
Статистические испытания схемы проводятся исходя из того, что генерирование случайных логических переменных xI проводится с помощью равномерного...
-
Построение, или моделирование, конечной факторной системы для анализируемого экономического показателя хозяйственной деятельности можно осуществить как...
-
После получения матриц спектра плана, проведем 70 опытов в каждой точке. По полученным параметрам построим регрессионную модель второго порядка,...
-
Частным случаем недетерминированной связи является связь случайная - стохастическая (вероятностная). Реализация вероятностного подхода к описанию...
-
Выбор переменных - Моделирование вероятности банкротства
Как уже было отмечено выше, единого набора финансовых и нефинансовых показателей, которые необходимо включать в модели, не существует, поэтому было...
-
Данная программа представляет собой реализацию имитации реального объекта, то есть документооборота отдела с помощью имитационной модели. Поскольку...
-
Моделирование динамики рыночной системы
Введение В современных условиях динамичного развития рыночной системы экономика, испытывающая многочленные подъемы и спады, требует внешнего воздействия,...
-
В данной главе описан способ прогнозирования с помощью НС, основанный на методе окон. Также приведен обзор применения НС в финансовой сфере. Общий подход...
-
Задачи, решаемые с помощью эконометрической модели можно классифицировать по трем признакам: 1) по конечным прикладным целям; 2) по уровню иерархии; 3)...
-
Модель Бокса и Дженкинса Процедуры оценки параметров и прогнозирования, описанные в разделе Идентификация модели временных рядов, предполагают, что...
-
Моделирование временной переменная автокорреляция Главным инструментом эконометрического исследования является модель. Выделяют три основных класса...
-
Возможны две различных стратегии реструктуризации сферы централизованного теплоснабжения, и, как следствие, различные методики анализа возникающих...
-
В данной главе мы обсуждаем известные модели НС: модель Маккалоха и Питтса; модель Розенблата; модели Хопфилда и Больцмана; модель на основе обратного...
-
Определение . Алгебраическим дополнением минора матрицы называется его Дополнительный минор , умноженный на (-1) в степени, равной сумме номеров строк и...
-
Заключение, Список использованной литературы - Моделирование систем
В приложении 1 показана модель Simulink библиотеки SimEvents с результатами моделирования в течение 60 секунд. За это время пришло 12004 пакета, из них...
-
Моделирование процессов управления предполагает последовательное осуществление трех этапов исследования. Первый - от исходной практической проблемы до...
-
Рис.2. Схема алгоритма моделируемой модели Обоснования выбранных систем проектирования В качестве программной среды моделирования решено использовать...
-
Введение - Моделирование систем
Изобретение и дальнейшее развитие персонального компьютера значительно упростило жизнь человека. Микро ЭВМ постепенно начали входить в нашу повседневную...
-
Математическое моделирование экономических явлений и процессов с целью оптимизации процессов управления - область научно-практической деятельности,...
-
Целью курсовой работы является эффективная организация работы отдела планирования и экономического анализа Могилевского филиала РУП "Белтелеком"....
-
Описание реальных отношений между экономическими объектами и производственными процессами наиболее рационально и в полной мере осуществляется с помощью...
Подбор настроек ПИ-регулятора, Моделирование ПИ-регулятора. - Выбор настроек и анализ замкнутой системы регулирования с ПИ-регулятором