Экспериментальные исследования математической модел блока управления, Исследование тепловых режимов с помощью математической модели - Математическая модель блока управления приводами автоматики космического корабля нового поколения
Исследование тепловых режимов с помощью математической модели
При запуске любого электродвигателя возникает ток превышающий номинальный ток в рабочем режиме электродвигателя от 2 до 20 раз. Этот ток называют пусковым током электродвигателя. Величина пускового тока определяется типом двигателя, скоростью вращения, наличием на валу нагрузки, схемой включения и другими параметрами. Пусковой ток возникает из-за того, что в обмотках электродвигателя в момент запуска наводится очень сильное магнитное поле необходимое, для того чтобы запустить и раскрутить ротор. При включении электродвигателя сопротивление обмоток мало и следовательно по закону Ома при не меняющемся напряжении в участке цепи ток возрастает. По мере того как двигатель раскручивается, в обмотках возникает индуктивное сопротивление или ЭДС и ток уменьшается до номинального значения. Подобные всплески реактивной энергии служат причиной возникновения губительных для электроники скачков или перепадов напряжения, а также могут привести к тепловым перегрузка и как следствие тепловому пробою ЭРИ. Поэтому для обеспечение безопасной посадки космонавтов необходимо исследовать тепловое влияние пусковых токов ЭМ, входящего в состав рулевого привода ПТДУ на работу блока управления платформой. Поскольку блок управления является составной часть привода и любые сбои в его работе могут привести к катастрофическим последствия при осуществлении посадки при помощи ПТДУ. Тем боле, что как следует из главы 1, подобные исследования ранее не проводились.
Для исследования тепловых режимов используем разработанную во 2 главе топологическую математическую модель блока управления. Исследования проводим для работы электродвигателя в режимах "Пуск", "Динамическое торможение", "Реверс".
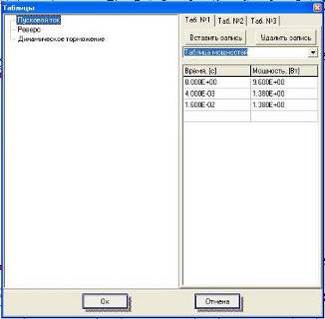
Рисунок 19 - Источник мощности зависящий от времени (режим "Пуск")
Пусковой ток представляет собой импульс длительностью 4мс и амплитудой 67А. Для того чтобы смоделировать режим "Пуск" задаем в топологической модели источники мощности включенные в узлы 29...44 (рисунок 5) зависящие от времени в виде таблицы рисунок 19. Таблицу заполняем в соответствии с желаемой функциональной зависимостью.
Поскольку источники мощности зависят от времени, выбираем нестационарный тип моделирования. Параметры моделирования представлены на рисунке 20.
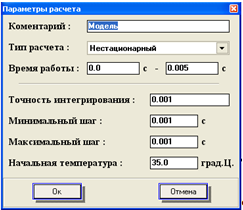
Рисунок 20 - Параметры моделирования
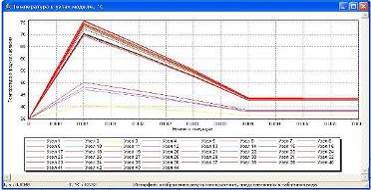
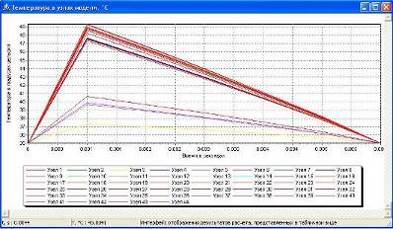
Рисунок 21 - График температур во времени (режим "Пуск")
После того как все параметры моделирования определены, проводим моделирование тепловых процессов. Результаты моделирования представлены на рисунке 21 и в приложении А.
Динамическое торможения ЭМ применено для уменьшения перерегулирования при движении привода и реализуется путем открытия плечей верхней половины мостовой схемы управления.
Исходные данные для моделирования представлены на рисунке 22.
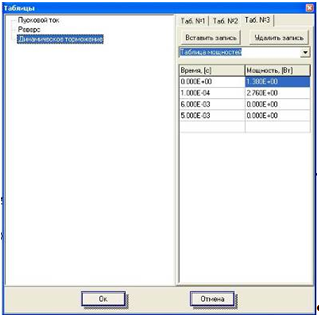
Рисунок 22 Источник мощности зависящий от времени (режим "Динамическое торможение")
После задания параметров, проводим моделирование тепловых процессов. Результаты моделирования представлены на рисунке 23 и в приложении Б.
График температур во времени (режим "Динамическое торможение")
После того как ЭМ полностью остановлен включается режим "Реверс". Моделирование данного режима проводим аналогично предыдущим режимам. Задаем в топологической модели источники мощности включенные в узлы 29...44 зависящие от времени в виде таблицы рисунок 24.
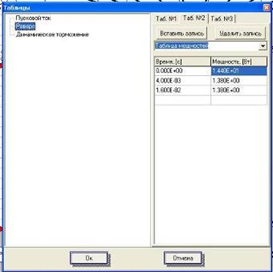
Рисунок 24 - Источник мощности зависящий от времени (режим "Реверс")
После того как все параметры моделирования определены, проводим моделирование тепловых процессов. Результаты моделирования представлены на рисунке 25 и в приложении В.
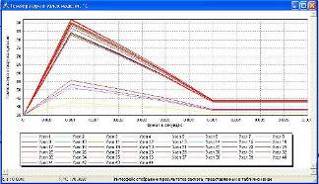
Рисунок 25 - График температур во времени (режим "Реверс")
После того как проведено топологическое математическое моделирование блока управления для различных режимов работы проведем тепловое моделирование МК для тех же самых режимов.
Для этого необходимо задавать переменные источники мощности на ключевых элементах. В режиме "Пуск" задействованы ключевые элементы VT1, VT4, VT7, VT9, VT12, VT14, VT16, VT18. Задаем на этих элементах переменные источники мощности в виде таблицы рисунок 26.

Рисунок 26 - Переменная мощность заданная таблицей (режим "Пуск")
Поскольку источники мощности зависят от времени, выбираем нестационарный тип моделирования. Параметры моделирования представлены на рисунке 27.
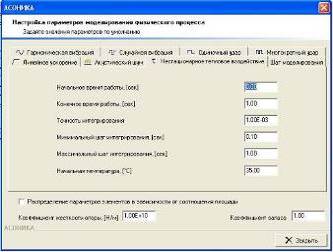
Рисунок 27 - Параметры моделирования
После того как все параметры определены, проводим тепловое моделирование МК. Для моделирования запускаем нестационарный тепловой расчет, используя соответствующую команду в меню "Анализ".
Результаты моделирования представлены в "Карте тепловых режимов работы ЭРИ" приложение Г и на рисунках 28...31.
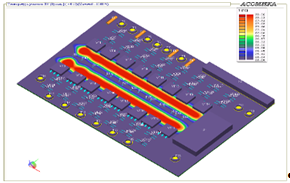
Рисунок 28 - Температура участков МК в режиме "Пуск" (первая сторона)
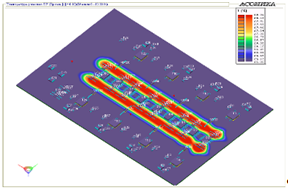
Рисунок 29 - Температура участков МК в режиме "Пуск" (вторая сторона)
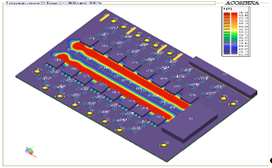
Рисунок 30 - Температура участков МК в режиме "Пуск" (первая сторона)
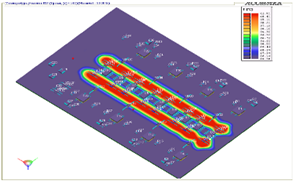
Рисунок 31 - Температура участков МК в режиме "Пуск" (вторая сторона)

Динамическое торможение реализуется путем открытия ключевых элементов верхней половины мостовой схемы управления VT1,VT4, VT7, VT9, VT11...VT18. Как и в предыдущем случае на ключевых элементах задаем переменные источники мощности в виде таблицы рисунок 32.
После задания параметров, проводим моделирование тепловых процессов. Результаты моделирования представлены на рисунках 33...36 и в приложении Д.
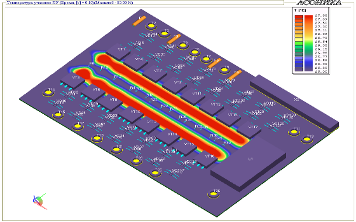
Рисунок 33 - Температура участков МК в режиме "Динамическое торможение" (первая сторона)
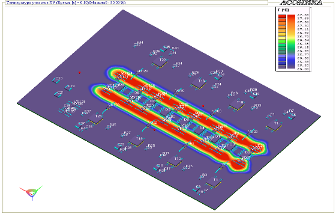
Рисунок 34 - Температура участков МК в режиме "Динамическое торможение" (вторая сторона)
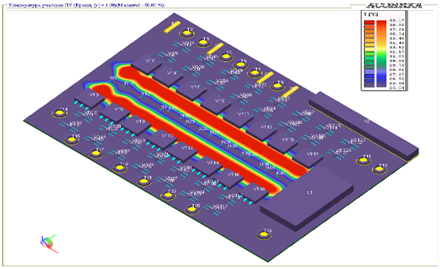
Рисунок 35 - Температура участков МК в режиме "Динамическое торможение" (первая сторона)
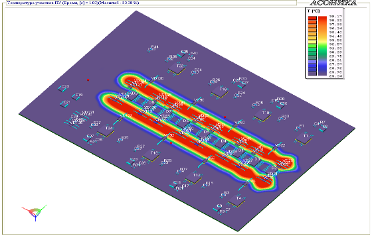
Рисунок 36 - Температура участков МК в режиме "Динамическое торможение" (вторая сторона)
Режим "Реверс" моделируется аналогично предыдущим режимам. Для этого необходимо задавать переменные источники мощности на ключевых
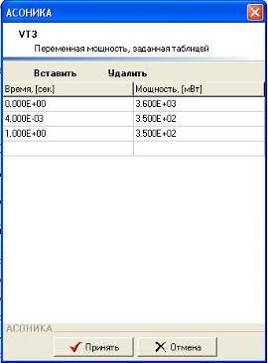
Рисунок 37 - Переменная мощность заданная таблицей (режим "Реверс")
Результаты моделирования представлены на рисунках 38...41 и в приложении Е.
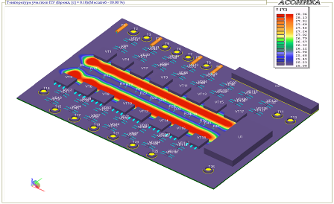
Рисунок 38 - Температура участков МК в режиме "Реверс" (первая сторона)
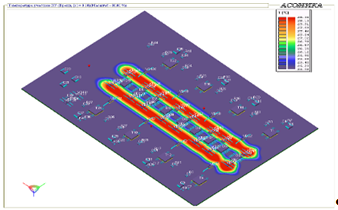
Рисунок 39 - Температура участков МК в режиме "Реверс" (вторая сторона)
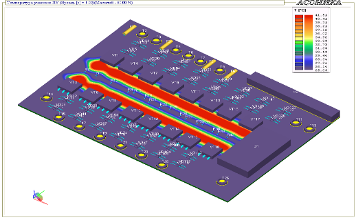
Рисунок 40 - Температура участков МК в режиме "Реверс" (первая сторона)
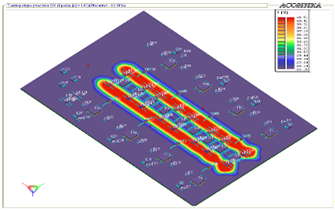
Рисунок 41 - Температура участков МК в режиме "Реверс" (вторая сторона)
Похожие статьи
-
МК (рисунки 6 и 7) представляет собой ПУ включающий в себя мостовую схему управления электродвигателем с элементами управления ключами моста, токовые...
-
На основании проведенного моделирования можно сделать выводы: - происходящие тепловые процессы скоротечны и не приводят к перегреву конструкции блока...
-
Подводя итог проделанной работе стоит отметить, что основная цель работы - обеспечение безопасности посадки ВА, достигнута. Задачи поставленные в...
-
Для определения и проведения экспериментальных исследований Тепловых режимов ЭРИ, разработаем топологическую математическую модель блока управления...
-
Разработка электрической схемы (выбор элементной базы, обоснование выбора) Рисунок 2- Функциональная схема блока управления Для обеспечения требований...
-
Уровень науки и техники Надежность средств, с помощью которых человек достигает космоса высокая, но не идеальна. РН -- сложная конструкция, и даже в...
-
№ Узла Имя узла Температура, °C Время 0 сек 1 Левая стенка 35 2 Верхняя крышка 35 3 Передняя панель 35 4 Нижняя крышка 35 5 Задняя панель 35 6 Правая...
-
№ Узла Имя узла Температура, °C Время 0 сек 1 Левая стенка 35 2 Верхняя крышка 35 3 Передняя панель 35 4 Нижняя крышка 35 5 Задняя панель 35 6 Правая...
-
КАРТА ТЕПЛОВЫХ РЕЖИМОВ РАБОТЫ ЭРИ (при нестационарном тепловом воздействии) Обозначение ЭРИ Сторона Температура ЭРИ Коэффициент тепловой нагрузки,...
-
КАРТА ТЕПЛОВЫХ РЕЖИМОВ РАБОТЫ ЭРИ (при нестационарном тепловом воздействии) Обозначение ЭРИ Сторона Температура ЭРИ Коэффициент тепловой нагрузки,...
-
КАРТА ТЕПЛОВЫХ РЕЖИМОВ РАБОТЫ ЭРИ (при нестационарном тепловом воздействии) Обозначение ЭРИ Сторона Температура ЭРИ Коэффициент тепловой нагрузки,...
-
№ Узла Имя узла Температура, °C Время 0 сек 1 Левая стенка 35 2 Верхняя крышка 35 3 Передняя панель 35 4 Нижняя крышка 35 5 Задняя панель 35 6 Правая...
-
С началом пилотируемого освоения космоса возникла задача обеспечения безопасности человека и возвращения его на Землю. Основная опасность грозила...
-
В большинстве случаев структурная неопределенность вызвана неполнотой знания аналитической структуры уравнений модели объекта управления. При не...
-
Любой электромеханический преобразователь можно рассматривать в установившемся и динамическом режиме. Модель в установившемся режиме, по сути, является...
-
Необходимо составить математическое описание теплообменника, в котором жидкий продукт нагревается насыщенным водяным паром (расход, кг/с), до температуры...
-
Задачей данного раздела курсового проекта является определение потоков мощности по линиям выбранного варианта электрической сети и напряжений на шинах...
-
При управлении подвижными объектами (такими, например, как мобильные роботы, подводные аппараты и т. п.) часто имеет место неопределенность цели, когда...
-
Модель "вход - выход" для нестационарной системы управления можно представить в следующем виде [2] . Где коэффициенты матриц возмущения и ограничены...
-
Адсорбционные методы исследования свойств поверхности позволяют количественно охарактеризовать происходящие при адсорбции межмолекулярные взаимодействия,...
-
Решение симплекс-методом с помощью симплекс-таблиц - Математические методы и модели в экономике
Определим оптимальный план выпуска продукции, решив задачу линейного программирования (ЗЛП). Для этого сначала приведем модель к каноническому виду...
-
Имитационная модель для оптимизации конструкции и режима работы вибрационного высевающего аппарата
ИМИТАЦИОННАЯ МОДЕЛЬ ДЛЯ ОПТИМИЗАЦИИ КОНСТРУКЦИИ И РЕЖИМА РАБОТЫ ВИБРАЦИОННОГО ВЫСЕВАЮЩЕГО АППАРАТА В работе рассматриваются высевающие аппараты...
-
Построим функцию роста валового регионального продукта: Таблица 11-Данные для функции роста ВРП Год (t) Y (миллион рублей) 1 372930 2 483951 3 648211 4...
-
Нахождение функций роста экономики региона Применив математическую модель на практике, можно узнать на сколько увеличится валовый региональный продукт,...
-
Уравнение динамики теплообменника: Передаточные функции объекта получим по его уравнению динамики. Для этого запишем уравнение по заданному каналу. Затем...
-
Сравнение старой и новой парадигм - О новой парадигме математических методов исследования
Проведем развернутое сравнение старой и новой парадигм математических методов исследования. При этом опираемся на материалы раздела "Математические...
-
Построение модели с помощью метода деревьев решений - Моделирование вероятности банкротства
В отличие от логистической регрессии, при использовании метода деревьев решений ограничения для независимых переменных отсутствуют, поэтому для...
-
Плата тиристорного управления предназначена для бесконтактного управления магнитными пускателями, которые в свою очередь подключают к электрической сети...
-
Реализуем математическую модель (2) (6) в MS Excel. Для этой цели построим таблицы исходных данных задачи по расчету оптимального графика занятости при...
-
Электрический расчет режимов сети - Расчет электрической сети микрорайона в г. Иркутск
Рассчитать режим сети для максимальных, минимальных нагрузок и в послеаварийном режимах. Напряжение на шинах РЭС при наибольших нагрузках и в...
-
Провести проверку сети, приведенной на рис. 1.4, с исходными расчетными данными из табл. 1.12 по потере напряжения в нормальном и послеаварийном режимах....
-
Моделирование водных экосистем - Математическое и компьютерное моделирование в естествознании
Научно-технический прогресс, развитие сельского хозяйства, урбанизация привели к загрязнению природных вод. Проблема загрязнения вод приобрела глобальный...
-
Прототипом разработанной автором системы моделей служит "точечная" модель [1], представляющая собой пространственно осредненный вариант уравнений горения...
-
Для того чтобы приступить непосредственно к созданию модели бизнес-процесса необходимо определить бизнес-метафору для лучшего понимания модели...
-
В практике управления системами различного назначения (экономическими, финансовыми, техническими и др.) неизбежно приходится сталкиваться с различными...
-
1. Цыпкин, Я. З. Частотные критерии робастной модальной линейных дискретных систем / Я. З. Цыпкин, Б. Т. Поляк // Автоматика.-1990. - № 5. - С.4-11. 2....
-
Выбор сечения проводов ЛЭП - Расчет электрической сети микрорайона в г. Иркутск
Выбрать сечения проводов сети, приведенной на рис. 1.4 с исходными данными из табл. 1.12. Определяем рабочие токи участков сети. Для участка 0-1:...
-
Маркетинговое исследование представляет собой системный сбор, обработку и анализ всех аспектов процесса маркетинга: продукта, его рынка, каналов...
-
Устойчивость выводов в математической модели - Модели оптимального плана управления запасами
Вполне ясно, что рассматриваемая классическая модель управления запасами, как и любые иные экономико-математические модели конкретных экономических...
-
Методы исследования математических моделей - Математическое моделирование в менеджменте и маркетинге
Все методы математического моделирования можно разделить на четыре класса: -аналитические (априорные); -имитационные (априорно-апостериорные) модели;...
Экспериментальные исследования математической модел блока управления, Исследование тепловых режимов с помощью математической модели - Математическая модель блока управления приводами автоматики космического корабля нового поколения