РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА, Расчет аналогового корректирующего устройства - Разработка системы автоматического управления скорости вращения ножей кофемолки
Расчет аналогового корректирующего устройства
Для коррекции в системе применяется корректирующее устройство (КУ) последовательного типа. КУ можно включать между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства в электрическую цепь после микропроцессора.
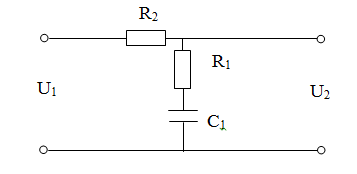
Рисунок 12 - Схема корректирующего устройства
Передаточная функция корректирующего звена /7, 335/:
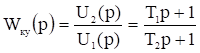
, (32)
Где ;

.
Из графика ЛАЧХ корректирующего устройства определим частоты излома:
Ла= л1=0.02 с -1
ЛВ= л2=0.9 с -1
Постоянные времени, соответствующие этим частотам:

С;
С.
Ля расчета значений данного корректирующего устройства необходимо определиться со значениями сопротивлений резисторов:

.
R1 Примем равным 33 Ом, а R2 примем равным 1000 Ом, соответственно. Исходя из данных значений, остальные элементы корректирующего устройства будут иметь следующие значения:
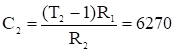
(мкФ).
Подставляя все найденные параметры в выражение (32) для передаточной функции корректирующего устройства, получаем передаточную функцию в следующем виде:
. (33)
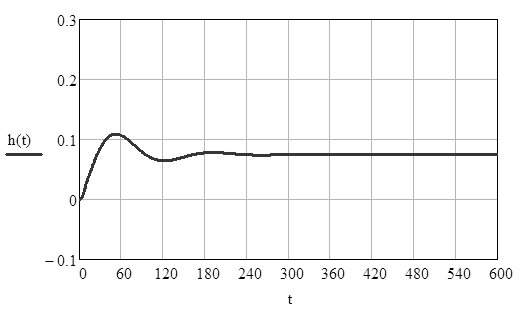
Рисунок 13 - Переходный процесс САУ с последовательным КУ
Для того, чтобы убедиться в правильности расчета корректирующего устройства построим переходный процесс дискретной САУ смешивания растворов с включенным в нее корректирующим устройством (рисунок 13).
TР= 61 с - время регулирования;

- перерегулирование.
Проведя детальный анализ полученного графика переходного процесса рассматриваемой системы можно сделать вывод, что причина, по которой производилась коррекция, устранена. Следовательно, стоит признать, что подбор корректирующего устройства был произведен верно, и система успешно скорректирована.
Похожие статьи
-
Расчет передаточной функции системы автоматического управления скорости вращения ножей кофемолки На рисунке 1 отображена структурная схема САУ скорости...
-
Выбор и расчет передаточной функции микропроцессора Микропроцессор S7-300 - это микропроцессоры, предназначенные для решения широкого круга задач...
-
Z-преобразование проведем по формуле: , (24) Где и - показатели цифрового преобразования. В рамках курсовой работы Принимаем их равными 1; W(p) -...
-
Построим ЛАЧХ САУ скорости вращения ножей кофемолки. Для этого разомкнем структурную схему по главной обратной связи. Рисунок 8 - Структурная схема...
-
В данной системе для приведения в действие ножей применим электродвигатель постоянного тока серии 4А112М Технические характеристики 4А112М: - номинальная...
-
Вариант 14 Преобразовать структурную схему и найти передаточную функцию системы автоматического управления по управляющему воздействию. Рисунок 1.1.1...
-
ВВЕДЕНИЕ - Разработка системы автоматического управления скорости вращения ножей кофемолки
Системы автоматического управления создаются для того, чтобы автоматически, без непосредственного участия человека поддерживать необходимый режим работы...
-
Soliphant-датчик предельного уровня используется для мелко гранулированных и порошкообразных сыпучих веществ. Его конструкция и материал позволяют...
-
Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительными. По коэффициентам характеристического...
-
В качестве датчика уровня предлагается вибрационные датчик предельного уровня Soliphant Т FTM 260. Конструктивно датчик выполнен в форме камертона...
-
Система автоматического управления (САУ) скорости вращения ножей кофемолки имеет в своем составе микропроцессор, электродвигатель, ножи, емкость и датчик...
-
Воспользуемся теперь для поиска решения функционалом (2.13). Пространство операторов В рассматриваем примере добавка (2.12) может быть представлена:...
-
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система. Рис. 2 Далее, следуя методическим указаниям,...
-
Для разделения действительной и мнимой частей передаточной функции умножим числитель и знаменатель передаточной функции на комплексно сопряженное число...
-
Сформулируем задачу поиска оптимального регулятора в общих понятиях: дан многомерный реальный объект управления с квадратной матричной передаточной...
-
Расчет коэффициента качества Рассчитаем весовые коэффициенты критериев сравнения (таблица 6.7) и интегрального коэффициента качества. Интегральный...
-
Сравнительная технико-экономическая эффективность разработки определяется по формуле: , (10) Где - сравнительная технико-экономическая эффективность...
-
Для ускорения процесса конструирования регулятора в пространстве состояний в Matlab была разработана функция, которая, при должной настройке, позволяет...
-
Особенности функционального назначения Разрабатываемый программный продукт - это модуль вебсайт для системы управлением контентом портала с архивом...
-
Цель Работы - изучить принципы работы элементов управления Progress и Slider. Получить навыки по самостоятельному созданию модальных диалоговых окон. -...
-
Определить наилучшие параметры корректирующего устройства следящей системы, обеспечивающих устойчивость системы и выполнение требований технического...
-
Для расчета надежности необходимо знание наработки на отказ (или) частоты отказов всего комплекта деталей, узлов применяемых в системе. В литературе эти...
-
В качестве основы расчета оценки стоимости разработки информационной системы была выбрана модель - COCOMO II. Согласно описываемой модели расчеты должны...
-
Теорема Котельникова - Системы цифрового управления
В 1933 году В. А. Котельниковым доказана теорема отсчетов, имеющая важное значение в теории связи: непрерывный сигнал с ограниченным спектром можно точно...
-
По заданному значению выбираем длину линии и удельное сопротивление линии. = 50 км; Марка провода ЛЭП: АС - 240 1.2 Расчет параметров модели...
-
Воспользуемся теперь критерием (2.14). Пространство состояний Структурная схема системы с учетом введенного воздействия примет вид: Запишем...
-
Проведем оценку эргономичности пользовательского интерфейса, заполнив таблицу 7.1. В ячейки, отражающие степень выраженности показателя, следует внести...
-
CoDeSys -- универсальный инструмент разработки прикладных программ для программируемых логических контроллеров на языках стандарта IEC 61131-3. Данный...
-
При формулировании задачи в одном из пространств возникает необходимость перехода к тождественной постановки в другом. К сожалению, не всегда...
-
Разомкнутый программный годограф инструментальный Программная среда Labview. Labview - это программная среда, использующая язык графического...
-
На ней - квадратная матрица передаточных функций объекта управления с полюсами и нулями на мнимой оси. - матрица передаточных функций фильтра,...
-
Пользовательский интерфейс должен позволять заводить в базе данных информацию о новых охранниках, обслуживаемых объектах, автоматизировать составление...
-
Линейная замкнутая система Рассмотрим линейную стационарную непрерывную управляемую систему: (1.1) - вектор состояния системы, - управление, - выход...
-
В настоящее время разводка входных и выходных сигналов производится децентрализованно к устройствам, подключенным напрямую к промышленной шине и...
-
В ходе разработки системы к прочим затратам можно отнести оплату интернет-трафика. Тариф Интернет-провайдера Мегалинк составляет 500 рублей в месяц....
-
К затратам на проектирование и разработку ПП (Зс) относятся: - Материальные затраты (Зм); - Затраты на электроэнергию(Зэ); - Затраты на оплату труда(Зт);...
-
Завершив выбор схемы работы системы и общего принципа работы ее частей и выбрав тип базы данных, следует перейти к выбору языка программирования....
-
Основная цель системы ДИСКОР - совершенствование оперативного управления работой железных дорог на основе более эффективного использования пропускной...
-
Описание проекта, который является объектом исследования Проект - представляет собой внедрение информационно - аналитической системы управления карьерой...
-
Все проводимые ниже тесты были проведены для получения характеристик производительности моделируемой системы, описанных в разделе №2. Для каждого теста...
РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА, Расчет аналогового корректирующего устройства - Разработка системы автоматического управления скорости вращения ножей кофемолки