После работы на двух заданных скоростях (щи1 и щи2) двигатель необходимо затормозить до нулевой скорости. - Электрический привод производственного механизма
При реактивном характере нагрузки производственного механизма примем вид торможения - динамическое. Расчет механической характеристики при динамическом торможении проводится на основании выражения:
.
RДТ=R89(рисунок 6)
Определяем необходимое сопротивление якорной цепи для режима динамического торможения. Для этого режима работы при начальном моменте торможения М, равному М=МПуск=160,44 Н-м, необходимо обеспечить скорость щ=щИ2= 79,498 рад/с. Добавочное сопротивление ступени определяется из выражения
, ,
RДв. гор+ RДТ= 2,33Ом;
RДТ=2,33-0,55=1,78 Ом.
Данные для построения характеристики динамического торможения заносим в таблицу 6.
Таблица 6
|
М, Н-м |
0 |
-160,44 |
|
Щ, рад/с |
0 |
49,768 |
Строим механические характеристики полного цикла работы двигателя при реактивном характере нагрузки производственного механизма (Рисунок 6).
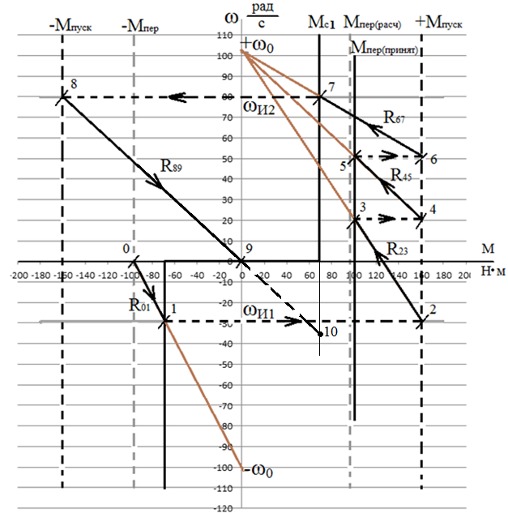
Рисунок 6 Механические характеристики полного цикла работы двигателя: 01 - пусковая характеристика и первая рабочая ступень; 23 - первая промежуточная характеристика; 45 - вторая промежуточная характеристика; 67 - вторая рабочая ступень, 89 - характеристика динамического торможения
Похожие статьи
-
Режим динамического торможения при реактивном характере нагрузке производственного механизма (участок 89 - рисунок 6) от до 0. RДв. гор+ RДТ= 2,33Ом; С....
-
Наибольшие пусковые ток и момент определяются из условий: I Пуск =(1,5ч2)-I Н =2- I Н =2-37=74 А; М Пуск =с- I Пуск =2,17-74=160,44 Н-м. Ток и момент...
-
Делаем пересчет механических характеристик двигателя для полученных значений сопротивлений. Полученные значения заносим в таблицу 5. RД. ст1'=3,43 Ом,...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Проверка двигателя по нагреву (метод эквивалентных величин) Метод эквивалентного тока , Где - определяем через площадь графика I2=f(t)(рисунки:11,12,13);...
-
- Первая промежуточная ступень: Rя. пр1=3,83 Ом; с; Н-м; МКон. фикт = МС1 = 68,93 Н-м. При расчете переходного процесса М=f(t) для первой промежуточной...
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
-
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
ВВЕДЕНИЕ - Электрический привод производственного механизма
Электрическим приводом называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их...
-
Заключение, Список используемой литературы - Электрический привод производственного механизма
В данной работе спроектирован электрический привод производственного механизма с параметрическим регулированием скорости двигателя. Выбран двигатель...
-
Режим работы и расчет фондов времени Режим работы предприятия, то есть характер рабочей недели, число рабочих дней, смен и их продолжительность, зависит...
-
Тормозные режимы работы - Асинхронный двигатель
Работа многих производительных механизмов состоит из трех этапов: пуска в ход, технологической операции и торможения. После отключения двигателя...
-
На основании сделанного анализа различных схем электропривода целесообразно взять схему электропривода механизма подъема электропривода с фазным ротором...
-
Нагрузка кранов, как правило, изменяется в широких пределах: для механизмов подъема - от 0,12 до 1,0 а для механизмов передвижения - то 0,5 до 1,0...
-
Производственные помещения вычислительного центра характеризуются следующими факторами вредного воздействия на работающего: - Повышенным тепловыделением...
-
Надежность - это комплексное свойство технического объекта (приборы, устройства, машины, системы); состоит в его способности выполнять заданные функции,...
-
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки. При...
-
В системе социально-экономических мероприятий, направленных на повышение благосостояния людей, важное место отводится развитию общественного питания....
-
По структурной схеме системы, приведенной на Рис. 6.1., составим математическую модель проектируемой системы для дальнейшего моделирования, которая...
-
Статическая мощность электродвигателя: , Где - предварительное значение КПД (для механизма подъема с цилиндрическим редуктором). Вт. Для легкого режима...
-
Работа в цехах или на участках по переработке пластмасс проектируется в две или три смены при 41 часовой рабочей неделе. Трехсменный режим целесообразен...
-
Целью данного расчета является выбор ступеней сопротивлений в цепях электропривода механизма передвижения моста. В соответствии с его выбором...
-
В ходе выполнения курсового проекта были найдены 12 альтернативных вариантов производственной структуры поточной линии и рассчитаны их основные...
-
Режим работы цеха - Производство щебня
Продолжительность обычной смены составляет 8 часов, затем 2 часа на проверку и проведение незначительного техобслуживания и регулировок. Один раз в...
-
Организация производства - Организация работы ресторана при гостинице на 75 мест
Все производственные помещения предприятий общественного питания можно подразделить на заготовочные, доготовочные, подсобные и вспомогательные....
-
Расчет численности производственных рабочих - Проектирование автотранспортного предприятия
К производственным рабочим относятся рабочие зон и участков, непосредственно выполняющие работы по ТО и ТР подвижного состава. Технологическое число...
-
Диэфиры используются в гидроприводах турбовинтовых двигателей. - Рабочие жидкости для гидросистем
Силоксаны И Полисилоксаны - жидкости на основе кремний - органических полимеров. Они имеют наиболее пологую из всех рабочих жидкостей...
-
Переход экономики на рыночные условия хозяйствования ставит предприятия перед необходимостью контролировать степень использования средств труда,...
-
Допустимые условия микроклимата - Параметры микроклимата производственной среды
5.1. Допустимые микроклиматические условия установлены по критериям допустимого теплового и функционального состояния человека на период 8-часовой...
-
Введение - Расчет авиационного реверсивного электрического двигателя с последовательным возбуждением
Электродвигатель обмотка магнитопровод последовательный Гражданская авиация в России и за рубежом развивается по одним законам. Оборудование воздушных...
-
При фиксированном эффективном фонде времени работы производственная программа в вариантах определяется по формуле: (3.1) Где - годовая производственная...
-
В электропечи можно получать легированную сталь с низким содержанием серы и фосфора, неметаллических включений, при этом потери легирующих элементов...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Для определения необходимого количества производственных рабочих, управленческого и вспомогательного персонала необходимо произвести расчет. Число...
-
Грузоподъемность не более Наибольшая погрешность позиционирования не более 20 кг ±10 мм. Наибольшие перемещения по степени подвижности не более: - по...
-
Санитарные правила для предприятий общественного питания прописаны в СанПиН 42-123-5774-91. Требования к личной гигиене работников соблюдены : повара...
-
До начала первой половины 1990-х годов Малмыжский ремзавод работал в две смены, объем двигателей прошедших текущий и капитальный ремонт составлял от...
-
ВЫБОР ОПТИМАЛЬНОГО ВАРИАНТА КОРОБКИ СКОРОСТЕЙ Выбор оптимального варианта коробки скоростей очень сложен. Здесь большое значение имеют группы и типы...
После работы на двух заданных скоростях (щи1 и щи2) двигатель необходимо затормозить до нулевой скорости. - Электрический привод производственного механизма