Основний зміст роботи - Чисельні методи підвищення ефективності аналізу моделі автотранспортного потоку-слідування за лідером
Автотранспортний апроксимація завадостійкий водій
У вступі Обгрунтовано актуальність та наукову новизну дисертації, визначено мету роботи і коло вирішуваних задач, об'єкт та предмет дослідження, вказано новизну отриманих результатів, наведено дані про особистий внесок автора у наукових роботах, апробацію одержаних результатів та практичну значимість.
У першому розділі Проведено огляд літературних джерел та проаналізовано стан досліджень в області розвитку теорії транспортних потоків.
Становленню і розвитку теорії управління автотранспортних потоків вагомо посприяли перша узагальнююча робота з теорії транспортного потоку, опублікована Ф. Хейтом, а також праці В. Ештона, Д. Дрю, Г. Пригожина, Р. Германа, Г. Дейхила, В. В. Сильянова. Первинним завданням, що послужило розвитку моделювання транспортних потоків, став аналіз пропускної спроможності магістралей і перетинів. Дослідженню та вивченню теорії управління транспортних потоків та її моделей, присвячені роботи: Г. Д. Дубеліра В. В. Сильянова, В. Ф. Бабкова, Я. А. Калужського, О. А. Білятинського, Я. В. Хом'яка, В. Н. Іванова, Е. М. Лобанова, В. М. Трiбунського, В. В. Фiлiппова, В. М. Кислякова, І. В. Бегми, Е. А. Чудакова, А. К. Бiруля, Л. А. Кероглу, Н. Ф. Хорошилова, Н. Я. Говорущенко, В. Г. Гука та ін. Рух автотранспортного потоку у міських умовах на основі динаміки автомобіля вивчали М. С. Фiшельсон, А. А. Поляков, Д. С. Самойлов, Д. А. Вулiс, Г. Ватсон, Л. Хьюз, Т. Мейсон, А. Янте, Б. Грiншильдс та iн.
Моделі мікро-рівня характеризуються описом окремих транспортних засобів і взаємодій між ними. Моделі цього класу показують поведінку окремих учасників дорожнього руху, що підкоряються правилам поведінки і взаємодії транспортних засобів. Правила поведінки містять додаткові стратегії для управління швидкістю і прискоренням. Поведінка автотранспортного потоку дуже мінлива і залежить від дії багатьох факторів та їх комбінацій. Умови руху, тобто реальна обстановка на дорозі, в якій рухається автомобіль у певний момент часу, істотно змінюються із значним збільшенням інтенсивності руху в останні роки. Завантаження дороги безпосередньо впливає на ступінь зручності руху автомобіля по дорозі, на ефективність використання автомобільного транспорту і витрату пального.
При вирішенні питань, пов'язаних зі зменшенням числа ДТП (особливо викликаних зіткненням автомобілів між собою), необхідно детально вивчати взаємодію автомобілів, що рухаються один за одним, тобто подальше вдосконалювати і підвищувати ефективність теорії - слідування за лідером, математичним виразом якої є мікроскопічна модель транспортного потоку.
У результаті вивчення транспортних потоків високої щільності і спеціальних експериментів, проведених американськими фахівцями, була запропонована теорія проходження за лідером, математичним виразом якої є мікроскопічна модель транспортного потоку. Це питання розглянуто у роботах іноземних та вітчизняних науковців, таких як Ф. Хейт, В. Сильянов, Е. Лобанов, О. А. Білятинський та ін.
Теорія "слідування за лідером" є розвитком теорії спрощених динамічних моделей. Вона базується на гіпотезі про існування деякої закономірності взаємодії автомобілів, які рухаються один за одним на близькій відстані. Диференційне рівняння теорії "слідування за лідером" одержане з початкової умови, що усі автомобілі рухаються в колонні на відстані, яка вимагається правилами дорожнього руху. Тоді координати положення П-го і (П+1)-го автомобілів можна описати залежністю:

, (1)
Де - мінімальна відстань між стоячими автомобілями; - відстань між автомобілями, які встановлюються у залежності від швидкості руху; - довжина автомобіля; п - порядковий номер автомобіля.
Диференціюючи рівняння (1) за часом, одержуємо:

,
Де П = 1, 2, 3.
Це рівняння може бути виражено через швидкість у наступному вигляді:

,
,
,




Де - прискорення заднього автомобіля; та - швидкості заднього і переднього автомобілів; - час реакції водія.
Можна виразити це правило через прискорення:

. (2)
Проведений аналіз літературних джерел свідчить про відсутність досліджень в даному напрямку при сучасних умовах руху, тому в дисертації ставиться задача розробки методів підвищення ефективності алгоритмів обробки інформації від GPS-приймачів для розрахунку параметрів мікро-моделі транспортного потоку - слідування за лідером в автотранспортному потоці в різних режимах та реальних умовах руху автомобілів, яка має важливе значення при подальшому вирішенні комплексних автотранспортних задач.
У другому розділі розроблено завадостійкі методи чисельного розрахунку швидкості та прискорення автотранспортних засобів на основі розроблених "швидких" сплайн-апроксимацій першої та другої похідних від часових послідовностей функцій шляху цих транспортних засобів.
Щоб дослідити модель автотранспортного потоку - слідування за лідером (розділ 1) для транспортних засобів потрібно обробляти дані про рух зв'язаних об'єктів (наприклад, за допомогою GPS-приймачів), які отримані з похибками (похибки викликані неточністю вимірювальної апаратури).
Також потрібно знаходити першу та другу похідні від "зашумлених" графіків руху об'єктів, що відповідає швидкостям та прискоренням руху автомобілів. Тому ставиться задача розробки математичного методу оцінки параметрів руху (мікро-моделі автотранспортного потоку - слідування за лідером), який дозволив би мінімізувати вказані похибки.
1. Удосконалено метод чисельного розрахунку похідної (швидкості автотранспортного засобу) з використанням швидкого сплайн-перетворення.
Методи чисельного розрахунку похідної від функції, яка спостерігається на фоні випадкових похибок дослідних даних, основані на згладжуванні цієї функції поліномами найкращого середньоквадратичного наближення, рядами Фур'є, сплайнами. Тоді подальше знаходження самої похідної виконується аналітично.
Тобто, ставиться задача: обчислити чисельно похідну функції виду

,
Де Y(t) - шлях автотранспортного засобу, який спостерігається на фоні похибок.





Нехай на відрізку в точках задані значення деякої дискретної часової функції. Їм відповідають (ще не розраховані) відліки похідної в точках. Тоді і будуть пов'язані співвідношеннями:
І
,
Де і - оператори диференціювання і інтегрування відповідно.
Будемо вважати, що значення похідної описуються локальним кубічним ермітовим сплайном
,
Де - матриця планування,

Вектор оцінюваних параметрів (ординат точок "склейки" ділянок сплайну). Такий сплайн належить - класу неперервно диференційованих функцій.
Тоді
.
Позначимо через
Матрицю, розмірністю
,
Яка складається з проінтегрованих локальних функцій форми сплайну.
Вимагатимемо виконання умови мінімуму середньоквадратичного відхилення:

.
Цій умові задовольняє розв'язок системи нормальних рівнянь:
Знайдений вектор оцінюваних параметрів повністю визначає сплайн. Відмітимо, що матриці і не залежать від вхідних параметрів і можуть бути розраховані попередньо. Таким чином, За часовими відліками початкової функції Швидко знаходимо сплайн-апроксимацію похідної цієї функції без попереднього розрахунку самих відліків похідної .
Значення локального кубічного ермітова сплайну в довільній точці обчислюється за формулою:


Для,
Де - е - значення ординат вузлів "склейки" ділянок сплайну,
- локальні функції форми, дискретні значення яких заповнюють стовбці матриці планування і розраховуються за формулами:

,
;
;
,
;
;
;
,
;
;
,
;
;
;
;
,
;
;












, ;
; ,
Де - кількість відліків на - му відрізку.
Кількість операцій множення, додавання, необхідних для обчислення швидкої сплайн-апроксимації похідної від функції, яка спостерігається:

.
Проведемо порівняння якості запропонованого методу чисельного розрахунку похідної від функції, яка спостерігається на фоні випадкових похибок дослідних даних, із класичним методом (згладжування цієї функції сплайном і подальше аналітичне знаходження самої похідної).
Для прикладу було взято функцію
На інтервалі в точках з кроком 1/32 (Рис. 1), де - гаусівський некорельований шум. Похідна детермінованої основи відповідно
(Рис. 1). Розрахунки проводилися в середовищі MatLab.
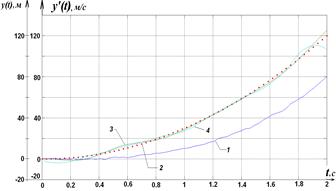
Рис. 1. Похідні, чисельно розраховані класичним та запропонованим методами від вхідного сигналу із середньоквадратичним відхиленням шуму
Де 1 - вхідний сигнал з шумом до диференціювання; 2 - теоретична похідна;
- 3 - похідна, чисельно розрахована запропонованим методом; 4 - похідна, чисельно розрахована класичним методом.
Для 64 відліків початкової функції і 16 вузлів "склейки" сплайну отримано наступні результати:
- - СКВ "вхідного" гаусівського некорельованого шуму змінювалося з 0,2 до 1,1 (Рис. 2); - при цьому СКВ теоретичної похідної від похідної, чисельно розрахованої класичним методом, змінювалося з 2,40 до 3,48 (Рис. 2); - СКВ теоретичної похідної від похідної, чисельно розрахованої запропонованим методом, змінювалося з 0,53 до 2,87 (Рис. 2).
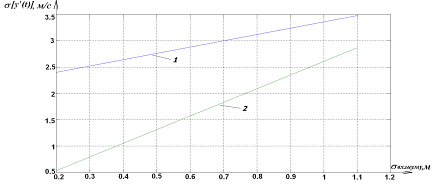
Рис. 2. Середньоквадратичні відхилення теоретичної похідної від похідної, чисельно розрахованої класичним (STD_KL) та запропонованим (STD_NOV) методами,
Де 1 - СКВ теоретичної похідної від похідної, чисельно розрахованої класичним методом (STD_KL);
- 2 - СКВ теоретичної похідної від похідної, чисельно розрахованої запропонованим методом (STD_NOV). 2. Удосконалено метод чисельного розрахунку другої похідної (прискорення автотранспортного засобу) з використанням швидкого сплайн-перетворення.
В подібний спосіб можна розрахувати і швидку сплайн-апроксимацію другої похідної (прискорення).
Тобто, ставиться задача: обчислити чисельно другу похідну функції виду

,
Де Y(t) - шлях автотранспортного засобу, який спостерігається на фоні похибок.
Нехай на відрізку в точках
Задані значення
Деякої дискретної часової функції. Їм відповідають (ще не розраховані) відліки похідної
В точках





,
Та (ще не розраховані) відліки другої похідної

В точках
.
Тоді і будуть пов'язані співвідношеннями:
І,
Де і - оператори двократного диференціювання та двократного інтегрування відповідно.

Будемо вважати, що значення другої похідної описуються локальним кубічним ермітовим сплайном, де - матриця планування, - вектор оцінюваних параметрів (ординат точок "склейки" ділянок сплайну). Такий сплайн належить - класу неперервно диференційованих функцій.
Тоді
.
Позначимо через
Матрицю, розмірністю
,
Яка складається з двічі проінтегрованих локальних функцій форми сплайну.
Вимагатимемо виконання умови мінімуму середньоквадратичного відхилення:

.
Цій умові задовольняє розв'язок системи нормальних рівнянь:
Знайдений вектор оцінюваних параметрів повністю визначає сплайн. Відмітимо, що матриці і не залежать від вхідних параметрів і можуть бути розраховані попередньо. Таким чином, За часовими відліками початкової функції Швидко знаходимо сплайн-апроксимацію Другої похідної цієї функції без попереднього розрахунку самих відліків другої похідної та першої похідної .
Значення локального кубічного ермітова сплайну в довільній точці обчислюється за формулою:




Для,
Де - е - значення ординат вузлів "склейки" ділянок сплайну,
- локальні функції форми, дискретні значення яких заповнюють стовбці матриці планування і розраховуються за формулами, вказаними у підрозділі 2.3.
Кількість операцій множення, додавання, необхідних для обчислення швидкої сплайн-апроксимації другої похідної від функції, яка спостерігається:

.
Проведемо порівняння якості запропонованого методу чисельного розрахунку другої похідної від функції, яка спостерігається на фоні випадкових похибок дослідних даних, із класичним методом (згладжування цієї функції сплайном і подальше аналітичне знаходження самої похідної).
Для прикладу візьмемо функцію
На інтервалі в точках з кроком 1/32 (Рис. 3), де - гаусівський некорельований шум. Друга похідна детермінованої основи відповідно
(Рис. 3).

Рис. 3. Другі похідні, чисельно розраховані класичним та запропонованим методами від вхідного сигналу із середньоквадратичним відхиленням шуму, де 1 - вхідний сигнал з шумом до диференціювання; 2 - теоретична друга похідна; 3 - друга похідна, чисельно розрахована запропонованим методом; 4 - друга похідна, чисельно розрахована класичним методом.
Для 64 відліків початкової функції і 16 вузлів "склейки" сплайну отримано наступні результати:
- - СКВ "вхідного" гаусівського некорельованого шуму змінювалося з 0,02 до 0,05(Рис.4); - при цьому СКВ теоретичної другої похідної від другої похідної, чисельно розрахованої класичним методом, змінювалося з 2,72 до 12,45 (Рис. 4); - СКВ теоретичної другої похідної від другої похідної, чисельно розрахованої запропонованим методом, змінювалося з 1,25 до 3,25 (Рис. 4).
При проведенні порівняння якості запропонованого методу чисельного розрахунку першої та другої похідних (швидкості та прискорення транспортних засобів відповідно) від функції, яка спостерігається на фоні випадкових похибок дослідних даних, із класичним методом (згладжування цієї функції сплайном і подальше аналітичне знаходження самої похідної), встановлено, що похибки чисельного розрахунку похідної від функції, яка спостерігається на фоні випадкових похибок дослідних даних, запропонованим методом менші ніж похибки чисельного розрахунку цієї ж похідної класичним методом. На це вказує менше середньоквадратичне відхилення.
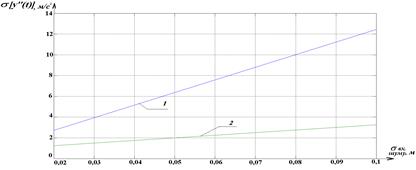
Рис. 4. Середньоквадратичні відхилення теоретичної другої похідної від другої похідної, чисельно розрахованої класичним (STD_KL) та запропонованим (STD_NOV) методами, де 1 - СКВ теоретичної другої похідної від другої похідної, чисельно розрахованої класичним методом (STD_KL); 2 - СКВ теоретичної другої похідної від другої похідної, чисельно розрахованої запропонованим методом (STD_NOV).
У третьому розділі Описано проведений натурний експеримент дослідження моделі автотранспортного потоку - слідування за лідером в транспортному потоці м. Києва на основі GPS-навігації та наведено результати експериментальних досліджень.
Удосконалено завадостійкі методи аналізу параметрів моделі слідування за лідером та розрахунку часу реакції водія в різних режимах руху апробовані на реальних даних з GPS-приймачів OEMV-1 та OEMV-3 та отримано відповідні наукові результати.
Проведено натурний експеримент дослідження моделі автотранспортного потоку - слідування за лідером в реальних режимах руху транспортного потоку в сучасних умовах за допомогою GPS-приймачів OEMV-1 та OEMV-3, встановлених на автомобілях Volkswagen Transporter та Volkswagen Passat відповідно.
Для дослідження в сучасних умовах моделі руху за лідером для реальних об'єктів було оброблено дані про рух зв'язаних об'єктів, за допомогою GPS-приймачів, які отримані з похибками (похибки викликані неточністю вимірювальної апаратури - 0,5-1,5 м середня похибка).
Автор дисертації висловлює глибоку подяку Співробітникам Аерокосмічного центру НАУ та його Директору - Кондратюку Василю Михайловичу - за організацію цього натурного експерименту.
Експериментальне дослідження мікро-моделі - слідування за лідером було проведено в колоні автотранспортного потоку м. Києва в літній період при сучасних умовах та режимах руху автомобілів із використанням GPS-приймачів - радіоприймальних пристроїв для визначення географічних координат поточного розташування антени приймача на основі даних про тимчасові затримки приходу радіосигналів, випромінюваних супутниками, які були встановлені на автомобілях (рис. 5).



А) б) в)



Г) д) е)
Рис. 5. Підготовка до проведення експерименту: а) - встановлення антени GPS-приймача OEMV-1 на автомобіль Volkswagen Transporter; б) - встановлення антени GPS-приймача OEMV-3 на автомобіль Volkswagen Passat; в), г), д), е) - під'єднання GPS-приймачів OEMV-1 та OEMV-3 на автомобілі Volkswagen Transporter та Passat
GPS-приймач обчислює власне положення, вимірюючи час, коли було послано сигнал із супутників. Ці сигнали розповсюджуються зі швидкістю світла у всесвіті, та із трохи меншою швидкістю через атмосферу. Приймач використовує час отримання повідомлення для обчислення відстані до супутника, виходячи з якої, шляхом застосування геометричних та тригонометричних рівнянь обчислюється положення GPS-приймача. Отримані координати перетворюються в більш наочну форму, таку як широта та довгота, або положення на карті, та відображається користувачеві. Для обчислення положення автомобіля необхідно отримувати інформацію із 4-х супутників і більше (3 просторові координати і час передачі координат). Іншими словами, GPS-приймач використовує чотири параметри для обчислення чотирьох невідомих: x, y, z та t.
На рис. 6 зображено початок експериментального дослідження мікро-моделі автотранспортного потоку - слідування за лідером із встановленими GPS-приймачами на автомобілях для визначення параметрів даної моделі (Volkswagen Transporter - лідер, Volkswagen Passat - слідує за лідером). Виїзд автомобілів, які були задіяні в експерименті з території НАУ.


Рис. 6. Початок експериментального дослідження моделі автотранспортного потоку - слідування за лідером
Експеримент було проведено за наступним маршрутом:
-НАУ; - Індустріальний шляхопровід; - Шулявський шляхопровід; - Індустріальний шляхопровід; - Проспект космонавта Комарова; - Площа Гната Юри; - НАУ.
Нижче наведено мапу з позначеним маршрутом експерименту, тобто положення автомобілів із встановленими GPS-приймачами на карті м. Києва (рис.7).
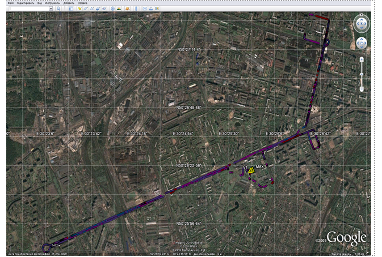
Рис. 7. Маршрут руху автомобілів, під час проведення експерименту
Під час експерименту були одержані записи руху транспортних засобів в різних режимах руху ("тянучка", "пробка", вільний рух) транспортного потоку в сучасних реальних умовах. Записи даних з GPS-приймачів одержані за допомогою атомних годинників. Наведемо приклад записів фрагментів руху двох "зв'язаних" транспортних засобів в щільному транспортному потоці ("тянучка") (рис. 8), приклади розрахунку їх швидкостей (рис. 9, 10) та часу реакції водія (рис. 11) класичним і запропонованим в дисертації методами. Детальніше результати досліджень в інших режимах руху наведено в дисертації. Згідно з формулою моделі руху за лідером:

,
Час реакції водія:

,
Де - прискорення заднього автомобіля;
Та - швидкості заднього і переднього автомобілів; - час реакції водія.
Рис. 8. Фрагмент руху двох автомобілів у щільному транспортному потоці ("тянучка"), де 1 - рух лідируючого автомобіля; 2 - рух автомобіля, який слідує за лідером
Рис. 9. Розрахунок швидкостей Класичним методом,
Де 1 - швидкість лідируючого автомобіля;
2 - швидкість автомобіля, який слідує за лідером в транспортному потоці;
3 - швидкості, розраховані як розділена різниця.





Рис. 10. Розрахунок швидкостей Запропонованим методом,
Де 1 - швидкість лідируючого автомобіля;
- 2 - швидкість автомобіля, який слідує за лідером в транспортному потоці; 3 - швидкості, розраховані як розділена різниця.
Навіть візуально видима "плавна" структура обчислених швидкостей, що відповідає реальному стану.
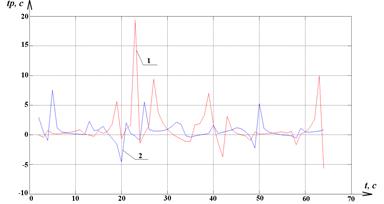
Рис. 11. Розрахунок часу реакції водія, де 1 - час реакції водія, розрахований класичним методом; 2 - час реакції водія, розрахований запропонованим методом.
При обрахунку параметрів мікро-моделі автотранспортного потоку - слідування за лідером в щільному потоці встановлено, що середній час реакції водія, обчислений класичним методом - 1,1 сек. СКВ часу реакції водія - 3,35 сек.
Середній час реакції водія, обчислений запропонованим методом - 0,64 сек. СКВ часу реакції водія - 1,65 сек.
Середньостатистичний показник часу реакції водія в різних режимах руху на всьому шляху експерименту склав 0,57 сек., експеримент тривав - 2300 сек.
Швидкість та час реакції водія запропонованим методом розраховуються точніше ніж класичним. На це вказує менше СКВ параметрів, які обчислюються.
При порівнянні якості отриманих результатів розрахунку в різних режимах руху автомобілів, на прикладі часу реакції водія, запропонованим в дисертації та класичним методом, встановлено, що середній виграш в точності запропонованого методу в порівнянні з класичним склав 57 %.
У четвертому розділі показано та обгрунтовано вплив параметрів мікро-моделі транспортного потоку - слідування за лідером на техніко-економічні показники функціонування системи ВАДС та на техніко-експлуатаційні характеристики автомобільної дороги не безпосередньо, а через інші показники, що характеризують стан проїзної частини або безпосередньо впливають на функціонування системи ВАДС та її підсистем.
Наведено графіки розрахунку показника емоційної напруги водія в різних досліджуваних режимах руху автотранспортного потоку для швидкостей автотранспортних засобів, наведених в розділі 3, які обраховані класичним та запропонованими в дисертаційній роботі методами. Графіки емоційної напруги водія відповідають руху експериментальних автотранспортних засобів в різних досліджуваних режимах руху автотранспортного потоку.
Швидкості автотранспортних засобів, в нашому випадку, Volkswagen Transporter та Passat, знаходилися класичним та запропонованими в дисертації методами чисельного диференціювання шляхів транспортних засобів, отриманих з GPS-приймачів OEMV-1 та OEMV-3 відповідно під час проведення натурного експерименту в реальному автотранспортному потоці в м. Києві.
Нижче наведено приклад розрахунку показника емоційної напруги водія, який полягає в аналізі розрахованих параметрів мікро-моделі автотранспортного потоку - слідування за лідером, після зупинки в автотранспортному потоці.


A) б)
Рис. 12. Емоційна напруга водія, що слідує за лідером в автотранспортному потоці м. Києва (після зупинки в "пробці"):
- А) - емоційна напруга, чисельно розрахована класичним (_KL) методом; Б) - емоційна напруга, чисельно розрахована запропонованим (_NOV) методом.
Проаналізувавши графіки показника емоційної напруги в різних режимах руху автотранспортних засобів в мікро-моделі автотранспортного потоку, можна зробити загальний висновок: при збільшенні швидкості ведучого автомобіля (і, як наслідок збільшення дистанції між автомобілями), емоційна напруга водія того, що слідує за лідером в автотранспортному потоці спадає. При гальмуванні переднього автомобіля (і, як наслідок, зменшення дистанції між транспортними засобами) - емоційна напруга водія, того що слідує за лідером - збільшується.
При порівнянні графіків емоційної напруги, розрахованої класичним та запропонованими методами можна відмітити, що зміни психофізіологічного стану водія точніше відповідають моментам зміни швидкості лідируючого автомобіля при обрахунку запропонованими в дисертації методами.
Також, графік психофізіологічного навантаження на водія (рис. 12_NOV) відповідає реальній психофізіологічній поведінці людини. А показник емоційної напруги, обрахований класичним методом, не зовсім коректно відображає зміни фізіологічної поведінки водія на короткому проміжку часу (рис. 12_KL).
В рамках дисертаційного дослідження Для забезпечення належного функціонування підсистеми ВДС "водій - дорога - зовнішнє середовище" системи ВАДС, так як одним із вирішуваних підсистемою ВДС питань екологічного впливу водія на дорогу і оточуюче середовище є накопичення сміття, бруду і сторонніх предметів на проїзній частині, накопичення бруду на об'єктах інженерного облаштування автомобільних доріг та інших негативних дій водіїв та учасників руху, які негативно відбиваються на екологічному просторі та експлуатаційних якостях доріг та підвищення техніко-експлуатаційних показників автомобільної дороги, що впливають на параметри моделі транспортного потоку - слідування за лідером, нами було проведено дослідження в області обгрунтувань режимів використання гідроструменевих методів в процесі експлуатації автомобільних доріг і показано переваги їх використання порівняно з іншими методами.
Однією із основних причин виникнення ДТП є незадовільний стан поверхні автомобільної дороги. Підвищення безпеки руху автомобілів на дорогах потребує широкого комплексу заходів, до переліку яких відносяться заходи по покращенню дорожніх умов, яке може бути досягнуто в процесі належного експлуатаційного утримування автомобільних доріг. Статистика показує, що серед всіх факторів, що супроводжують виникнення ДТП, низькі зчіпні якості проїзної частини відмічаються в 25-50 % випадків.
З метою зменшення аварійності на автомобільних дорогах і підвищення безпеки руху запропоновано технологічні режими очищення в процесі експлуатації автомобільних доріг за допомогою гідроструменевого методу та з використанням пристрою гідроабразивного очищення поверхонь (на який було отримано патент України на корисну модель № 45475, МПК (2009) В24С 5/00. № u200905974) в рамках виконання науково-дослідної роботи № 507 - ДБ 08 (№ держреєстрації 0108U004013). Запропонований метод по утримуванню доріг в належному експлуатаційному стані сприяє підвищенню економічної ефективності використання автомобільної дороги і дозволяє підвищити певні техніко-експлуатаційні показники, які впливають на вартісні показники утримування та експлуатації автомобільних доріг.
Похожие статьи
-
Актуальність теми. Оскільки на сьогоднішній день постійно збільшується кількість автомобільного транспорту на вулично-дорожній мережі міст, особливо...
-
Робота виконана в Національному авіаційному університеті Міністерства освіти і науки, молоді та спорту України, м. Київ. Науковий Керівник: Доктор...
-
Большинство динамических моделей транспортных потоков условно можно разделить на 3 класса: - Макроскопические (гидродинамические модели) - Кинетические...
-
Визначення необхідної кількості постів обслуговування Навантажувально-розвантажувальні роботи проводяться ручним способом. Визначаємо кількість постів...
-
Задача Рассмотрим поведение коэффициента равноправия разделения ПС для протоколов TCP и ARTCP в зависимости от числа соединений. Поведение коэффициента F...
-
Естественное освещение. Естественный свет проникает в помещение через световые фонари, проемы, окна. Естественное освещение нормируется по коэффициенту...
-
Необходимое число полос определяется исходя из пропускной способности одной полосы Р, (для транспортных средств - РТ = 600 - 700 ед./ч.; для пешеходов...
-
Цифровий потік ТМ програми включає в себе елементарний потік відеоданних, звукоданних, даних додаткової інформації (даних користувача), що утворяться...
-
Данный механизм разработан в докторской диссертации В. К. Тумей [22] и в него входит не только спецификация транспортного протокола, но и целая система...
-
Комунікації є невід'ємним атрибутом процесу управління. Вони зв'язують окремі елементи організації у єдине ціле, даючи можливість координувати їх дії,...
-
Вступ Міська електричка (або як її ще називають -- кільцева електричка) -- один із найбільших транспортних проектів останнього часу, реалізованих у місті...
-
Мета роботи: дослідження впливу зміни технічного стану окремих вузлів на поведінку діагностичних параметрів ГТД та набуття досвіду роботи з ЕОМ у...
-
Каждый из нижележащих уровней осуществляет управление скоростью передачи данных. Физический уровень ответственен за синхронизацию записи и сканирования...
-
Предмет исследования Одним из важнейших направлений научно-технического прогресса в настоящее время являются коммуникационные системы, представляющие...
-
Критерием для выбора метода технического обслуживания (поточный или метод универсальных постов) является суточная производственная программа по каждому...
-
Автомобиль, хотя и является предметом длительного пользования, все же имеет конечный срок жизни. Следовательно, после окончания его эксплуатации...
-
Параметры: Параметр Значение ПС каналов 0, 1, 2, 3 10 Мб/с Задержка каналов 0, 1, 2, 3 0.01 с ПС каналов 4, 5 128 Кб/с Задержка каналов 4, 5 0.1 с Время...
-
Структура класса router является сложной. В его состав входят несколько экземпляров класса interface. При инициализации класса router ему передаются два...
-
Класс, моделирующий канал, получает значения пропускной способности и задержки передачи при инициализации. Структура данных класса реализуется...
-
Система, поддерживающая ARTCP, может быть также совместима с TCP. Для этого, инициатор соединения, поддерживающий ARTCP, помещает в заголовке...
-
Итак, задача данной работы в создании нового механизма управления потоком для транспортного протокола в архитектуре сети с коммутацией пакетов (TCP/IP)....
-
Производственное освещение - неотъемлемый элемент условий трудовой деятельности человека. При правильно организованном освещении рабочего места...
-
Недостатки протокола TCP К наиболее существенным недостаткам протокола TCP в области управления потоками относится следующее: 1. К основному недостатку...
-
Потоки насыщения Потоки насыщения определяют путем натурных наблюдений в те периоды, когда на подходе к перекрестку образуются достаточно большие очереди...
-
Річна кількість трудомісткості ремонтів і ТО автомобілів визначається по формулам: Де: - відповідно трудомісткість одного ремонту чи ТО машин даної...
-
Специализированный подвижный состав (СПС) - Перевозка грузов автотранспортными предприятиями
- транспортные средства, предназначенные для перевозки специальных грузов или оборудованные специальными погрузочными (разгрузочными) устройствами,...
-
Исходные данные Исходные данные для расчета и построения графика зависимости "скорость потока - пропускная способность полосы движения МНД" приведены в...
-
Современные технологии, используемые для решения задач, связанных с планирование грузовых автомобильных перевозок, в логистике позволяют значительно...
-
Рассмотрим методику планирования маршрутов автотранспортной доставки продукции группы компаний "Лактика" в Санкт-Петербурге и Ленинградской области с...
-
В планировании осуществления перевозок выделяют: 1. Перспективное (стратегическое) планирование - отличительной особенностью его является период...
-
Роль и значение оптимизации перевозок мелкопартионных грузов Мелкопартионными грузами в зависимости от вида транспорта принято считать: - для...
-
Організація роботи на ділянці Характеристика станції Східна Станція Східна є - "воротами комбінату" через неї на територію комбінату для потреб...
-
Автомобильные транспортные средства являются основным подвижным источником экологического загрязнения. чем выше объемы перевозок, тем больше объемы...
-
Для выполнения работы на перекрестке необходимо выбрать удобное для наблюдений место, и записывать в строчку индексы транспортных средств (таблица 2.5),...
-
Без способности БС к накоплению пакетов задача установления соединений свелась бы к двум действиям - послать запрос на соединение - дождаться...
-
Задача За счет использования более консервативного механизма определения максимальной доступной ПС, протокол ARTCP во всех случаях должен обеспечивать...
-
Итак, словарь транспортных протоколов состоит из сообщений - так называемых TPDU, которые инкапсулируют передаваемые данные. Сам TPDU в свою очередь...
-
Для выполнения работы на перекрестке необходимо выбрать удобное для наблюдений место, и записывать в строчку индексы транспортных средств (таблица 2.5),...
-
Задача Превосходство ARTCP над TCP должно наиболее ярко проявляться при работе по каналам, с ненулевой вероятностью битовых ошибок, поскольку в отличие...
-
Автомобиль, хотя и является предметом длительного пользования, все же имеет конечный срок жизни. Следовательно, после окончания его эксплуатации...
Основний зміст роботи - Чисельні методи підвищення ефективності аналізу моделі автотранспортного потоку-слідування за лідером