Запас устойчивости и робастность - ПИД-контроллеры фирмы Honeywell
Возможность потери устойчивости является основным недостатком систем с обратной связью. Поэтому обеспечение необходимого запаса устойчивости являются самым важным этапом при разработке и настройке ПИД-регулятора.
Устойчивость системы с ПИД-регулятором - это способность системы возвращаться к слежению за уставкой после прекращения действия внешних воздействий. В контексте данного определения под внешними воздействиями понимаются не только внешние возмущения, действующие на объект, но любые возмущения, действующие на любую часть замкнутой системы, в том числе шумы измерений, временная нестабильность уставки, шумы дискретизации и квантования, шумы и погрешность вычислений. Все эти возмущения вызывают отклонения системы от положения равновесия. Если после прекращения воздействия система возвращается в положение равновесия, то она считается устойчивой. При анализе устойчивости ПИД-регуляторов обычно ограничиваются исследованием реакции системы на ступенчатое изменение уставки, шум измерений и внешние возмущения. Потеря устойчивости проявляется как неограниченное возрастание управляемой переменной объекта, или как ее колебание с нарастающей амплитудой.
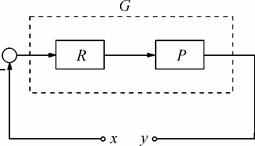
Рисунок 5.12 Структура разомкнутой системы управления с ПИД-регулятором для анализа устойчивости
В производственных условиях попытки добиться устойчивости системы с ПИД-регулятором опытным путем, без ее идентификации, не всегда приводят к успеху (например, для систем с объектом высокого порядка, для систем с большой транспортной задержкой или для объектов, которые трудно идентифицировать). Это создает впечатление, что устойчивость - мистическое свойство, которым не всегда можно управлять. Однако, если процесс идентифицирован достаточно точно, то мистика исчезает и анализ устойчивости сводится к анализу дифференциального уравнения, описывающего замкнутый контур с обратной связью.
Практически интерес представляет анализ Запаса Устойчивости, т. е. определение численных значений критериев, которые позволяют указать, как далеко находится система от состояния неустойчивости.
Наиболее полную информацию о запасе устойчивости системы можно получить, решив дифференциальное уравнение, описывающее замкнутую систему при внешних возмущениях. Однако этот процесс слишком трудоемок, поэтому для линейных систем используют упрощенные методы, позволяющие дать оценку запаса устойчивости без решения уравнений. Мы рассмотрим два метода: оценку с помощью годографа комплексной частотной характеристики разомкнутого контура (критерий Найквиста) и с помощью логарифмических АЧХ и ФЧХ (диаграмм Боде).
Устойчивая система может стать неустойчивой при небольших изменениях ее параметров, например, вследствие их технологического разброса. Поэтому ниже мы проанализируем функцию чувствительности системы с ПИД-регулятором, которая позволяет выявить условия, при которых система становится Грубой (мало чувствительной к изменению ее параметров).
Система, которая сохраняет заданный запас устойчивости во всем диапазоне изменений параметров вследствие их технологического разброса, старения, условий эксплуатации, во всем диапазоне изменений параметров нагрузки, а также во всем диапазоне действующих на систему возмущений в реальных условиях эксплуатации, называют Робастной. Иногда Робастность и Грубость используют как эквивалентные понятия.
Критерий Найквиста
Рассмотрим систему, состоящую из контроллера и объекта управления (рисунок 5.12), которая получена путем исключения из классической системы с ПИД-регулятором сигнала уставки. Будем считать, что обратная связь разомкнута, а для ее замыкания достаточно соединить точки и. Предположим теперь, что на вход подан сигнал
Тогда, пройдя через регулятор и объект управления, этот сигнал появится на выходе с измененной амплитудой и фазой, в виде
Где - комплексная частотная характеристика (КЧХ) системы, - аргумент КЧХ, - модуль КЧХ. Таким образом, при прохождении через регулятор и объект амплитуда сигнала изменится пропорционально модулю, а фаза - на величину аргумента КЧХ.
Если теперь замкнуть точки и, то сигнал будет циркулировать по замкнутому контуру, причем будет выполняться условие. Если при этом и, т. е. после прохождения по контуру сигнал попадает на вход регулятора в той же фазе, что и на предыдущем цикле, то после каждого прохождения по контуру амплитуда синусоидального сигнала будет возрастать, пока не достигнет границы диапазона линейности системы, после чего форма колебаний станет отличаться от синусоидальной. В этом случае для анализа устойчивости можно использовать метод гармонической линеаризации, когда рассматривают только первую гармонику искаженного сигнала. В установившемся режиме после наступления ограничения амплитуды колебаний в силу равенства будет выполняться условие
, , т. е. ,
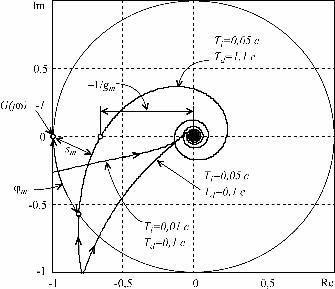
Рисунок 5.13 Три годографа КЧХ разомкнутых систем для объекта второго порядка при, и пропорциональном коэффициенте регулятора
Решив уравнение, можно найти частоту колебаний в замкнутой системе.
Комплексную частотную характеристику графически изображают в виде годографа (диаграммы Найквиста) - графика в координатах и. Стрелка на линии годографа указывает направление движения "карандаша" при возрастании частоты. Точка, которая соответствует условию существования незатухающих колебаний в системе, на этом графике имеет координаты и. Поэтому Критерий Устойчивости Найквиста формулируется следующим образом: контур, устойчивый в разомкнутом состоянии, сохранит устойчивость и после его замыкания, если его КЧХ в разомкнутом состоянии не охватывает точку с координатами [-1, j0]. Более строго, при движении вдоль траектории годографа в направлении увеличения частоты точка [-1, j0] должна оставаться слева, чтобы замкнутый контур был устойчив.
На рисунке 5.14 показаны реакции замкнутых систем с тремя различными годографами (рисунок 5.13) на единичный скачок уставки. Все три системы устойчивы, однако скорость затухания колебаний и форма переходного процесса у них различная. Интуитивно понятно, что система с параметрами наиболее близка к тому, чтобы перейти в состояние незатухающих колебаний при небольшом изменении ее параметров. Поэтому при проектировании ПИД-регулятора важно обеспечить не столько устойчивость, сколько ее запас, необходимый для нормального функционирования системы в реальных условиях.
Запас устойчивости оценивают как степень удаленности КЧХ от критической точки [-1, j0]. Если, то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы результирующее усиление вывело систему в колебательный режим: , откуда

Запасом По Усилению называется величина, на которую нужно умножить передаточную функцию разомкнутой системы, чтобы ее модуль на частоте сдвига фаз 180? стал равен 1.
Если на частоте сдвига фаз 180? коэффициент усиления разомкнутого контура равен (рисунок 5.13), то дополнительное усиление величиной переведет систему в точку [-1, j0], поскольку.
Аналогично вводится понятие Запаса По Фазе: это минимальная величина, на которую нужно увеличить фазовый сдвиг в разомкнутой системе, чтобы суммарный фазовый сдвиг достиг 180?, т. е.
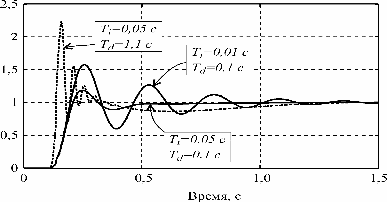
Рисунок 5.14 Переходная характеристика замкнутой системы, которая имеет годограф
Знак "+" перед стоит потому, что.
Для оценки запаса устойчивости используют также минимальное расстояние от кривой годографа до точки [-1, j0].
На практике считаются приемлемыми значения =2...5, =30?...60?, =0,5...0,8.
Для графика на рисунке 5.13 эти критерии имеют следующие значения:
- - для случая, =12,1; =15?; =0,303. - для случая, =11,8; =47,6; =0,663. - для случая, =1,5; =35,2; =0,251.
Если кривая годографа пересекает действительную ось в нескольких точках, то для оценки запаса устойчивости берут ту из них, которая наиболее близка к точке [-1, j0]. При более сложном годографе может быть использована оценка запаса устойчивости как запас по задержке. Запас По Задержке- это минимальная задержка, при добавлении которой в контур он теряет устойчивость.
Частотный Критерий Устойчивости
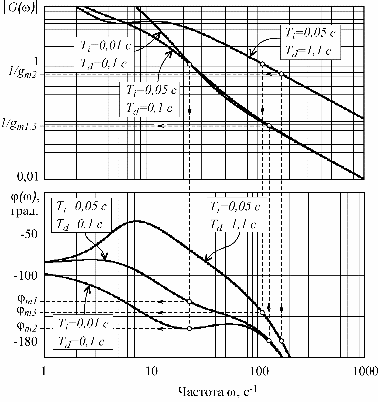
Рисунок 5.15 Оценка запаса по фазе и усилению для системы с годографом, показанным на рисунке 5.13
Для графического представления передаточной функции разомкнутой системы и оценки запаса устойчивости могут быть использованылогарифмические АЧХ и ФЧХ. Для оценки запаса по фазе сначала с помощью АЧХ находят частоту ("Частота Среза" или "Частота Единичного Усиления"), при которой, затем по ФЧХ находят соответствующий запас по фазе. Для оценки запаса по усилению сначала с помощью ФЧХ находят частоту, на которой фазовый сдвиг равен 180?, затем по АЧХ находят запас по усилению. Приведены примеры графических построений для оценки запаса по фазе и усилению для системы.
Если запас по фазе разомкнутого контура равен 0? или запас по усилению равен 1, после замыкания контура обратной связи система окажется неустойчивой.
Функции чувствительности
Передаточная функция реального объекта может изменяться в процессе функционирования на величину, например, вследствие изменения нагрузки на валу двигателя, числа яиц в инкубаторе, уровня или состава жидкости в автоклаве, вследствие старения и износа материала, появления люфта, изменения смазки и т. п. Правильно спроектированная система автоматического регулирования должна сохранять свои показатели качества не только в идеальных условиях, но и при наличии перечисленных вредных факторов. Для оценки влияния относительного изменения передаточной функции объекта на передаточную функция замкнутой системы (5.41) найдем дифференциал :

Поделив обе части этого равенства на и подставив в правую часть, получим


Из последнего соотношения виден смысл коэффициента - он характеризует степень влияния относительного изменения передаточной функции объекта на относительное изменение передаточной функции замкнутого контура, то есть являетсякоэффициентом чувствительности замкнутого контура к вариации передаточной функции объекта. Поскольку коэффициент является частото зависимым, его называют Функцией Чувствительности. Как следует из (5.6),

Введем обозначение

.
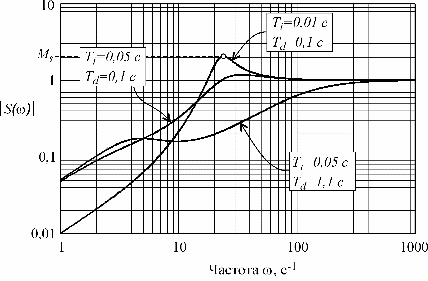
Рисунок 5.15 Модули функций чувствительности для систем с годографами
Величина называется комплементарной (дополнительной) функцией чувствительности, поскольку.
Заметим, что функция чувствительности входит во все три слагаемые уравнения замкнутой системы с ПИД-регулятором.

Функция чувствительности позволяет оценить изменение свойств системы после замыкания обратной связи. Поскольку передаточная функция разомкнутой системы равна, а замкнутой, то их отношение. Аналогично, передаточная функция от входа возмущений на выход замкнутой системы равна, а разомкнутой - , следовательно, их отношение также равно. Для передаточной функции от входа шума измерений на выход системы можно получить то же отношение.
Таким образом, зная вид функции, можно сказать, как изменится подавление внешних воздействий на систему для разных частот после замыкания цепи обратной связи. Очевидно, шумы, лежащие в диапазоне частот, в котором, после замыкания обратной связи будут усиливаться, а шумы с частотами, на которых, после замыкания обратной связи будут ослаблены.
Наихудший случай (наибольшее усиление внешних воздействий) будет наблюдаться на частоте максимума модуля функции чувствительности:

Максимум функции чувствительности можно связать с запасом устойчивости. Для этого обратим внимание, что представляет собой расстояние от точки (-1, j0) до текущей точки на годографе функции. Следовательно, минимальное расстояние от точки (-1, j0) до функции равно

Сопоставляя (5.8) и (5.9), можно заключить, что.
Если с ростом частоты модуль уменьшается, то, как видно из, . Подставляя сюда соотношение, получим оценку запаса по усилению, выраженную через максимум функции чувствительности:

Аналогично, но с более грубыми допущениями можно записать оценку запаса по фазе через максимум функции чувствительности:

Например, при получим и.
Робастность
Робастность - это способность системы сохранять заданный запас устойчивости при вариациях ее параметров, вызванных изменением нагрузки (например, при изменении загрузки печи меняются ее постоянные времени), технологическим разбросом параметров и их старением, внешними воздействиями, погрешностями вычислений и погрешностью модели объекта. Используя понятие чувствительности, можно сказать, что робастность - это низкая чувствительность запаса устойчивости к вариации параметров объекта.
Если параметры объекта изменяются в небольших пределах, когда можно использовать замену дифференциала конечным приращением, влияние изменений параметров объекта на передаточную функцию замкнутой системы можно оценить с помощью функции чувствительности (5.92). В частности, можно сделать вывод, что на тех частотах, где модуль функции чувствительности мал, будет мало и влияние изменений параметров объекта на передаточную функцию замкнутой системы и, соответственно, на запас устойчивости.
Для оценки влияния больших изменения параметров объекта представим передаточную функцию объекта в виде двух слагаемых
Где - расчетная передаточная функция, - величина отклонения от, которая должна быть устойчивой передаточной функцией. Тогда петлевое усиление разомкнутой системы можно представить в виде. Поскольку расстояние от точки (-1, j0) до текущей точки на годографе невозмущенной системы (для которой ) равно, условие устойчивости системы с отклонением петлевого усиления можно представить в виде
, (5.13)

, (5.14)

, (5.15)
Где - дополнительная функция чувствительности (5.8). Окончательно можно записать соотношение

Рисунок 5.16 Пояснение к выводу соотношения (5.16) которое должно выполняться, чтобы система сохраняла устойчивость при изменении параметров процесса на величину
Похожие статьи
-
Частотная идентификация в режиме релейного регулирования - ПИД-контроллеры фирмы Honeywell
Идентификация с помощью широкополосных сигналов, к которым относятся единичный скачок и прямоугольный импульс, не позволяет получить достаточно...
-
Принцип разомкнутого управления - ПИД-контроллеры фирмы Honeywell
Регулятор можно построить и без использования обратной связи. Если известны действующие на систему возмущения и желаемая реакция на изменение...
-
Постоянно растущие требования рынка к снижению времени регулирования, к качеству переходного процесса, к степени ослаблению влияния внешних возмущений и...
-
Идентификация в замкнутом и разомкнутом контуре - ПИД-контроллеры фирмы Honeywell
Идентификацию можно выполнять В Замкнутом Контуре с обратной связью, или В Разомкнутом . Идентификация в замкнутом контуре может быть Прямой и Косвенной...
-
Выбор тестовых сигналов - ПИД-контроллеры фирмы Honeywell
Для идентификации объекта управления необходимо измерять сигнал на его входе и реакцию на выходе. Для идентификации в частотной области оперируют...
-
Идентификация моделей динамических систем - ПИД-контроллеры фирмы Honeywell
Для выполнения качественного регулирования необходимы знания о динамическом поведении объекта управления. Процесс получения (синтеза) математического...
-
Интегральное насыщение - ПИД-контроллеры фирмы Honeywell
Рисунок 5.2 Реакция выходной переменной на скачок входного воздействия для ПИ-регулятора при условии ограничения мощности на входе объекта и без...
-
Методы синтеза - ПИД-контроллеры фирмы Honeywell
После того, как была определена модель (или некоторая характеристика) объекта, второй шаг заключается в настройки параметров ПИД-регулятора так, чтобы...
-
Идентификация процесса - ПИД-контроллеры фирмы Honeywell
Первый шаг в процесс автонастройки - определение подходящего описания объекта управления. Далее приводятся два наиболее часто используемых метода поиска...
-
Погрешность дифференцирования и шум - ПИД-контроллеры фирмы Honeywell
Проблема численного дифференцирования является достаточно старой и общей как в цифровых, так и в аналоговых регуляторах. Суть ее заключается в том, что...
-
Особенности реальных регуляторов - ПИД-контроллеры фирмы Honeywell
Описанный выше ПИД-регулятор и его модификации являются теоретическими идеализациями реальных регуляторов, поэтому для их практического воплощения...
-
Описание пакета AutotunerPID Toolkit AutotunerPID Toolkit позволяет: - экспериментировать с хорошо изученными методами настройки, и знакомится с...
-
Блок ПИД - это блок регулятора, который работает как пропорционально-интегрально-дифференциальный (ПИД) регулятор. Он реализует идеальную форму...
-
Введение - ПИД-контроллеры фирмы Honeywell
Основной задачей при построении систем автоматического регулирования является правильный выбор, установка, наладка и эксплуатация систем регулирования. В...
-
Под критическим значением параметра регулятора (K или Т) понимается такое значение (Ккр или Ткр), при котором система оказывается на границе...
-
Обзор ПИД-регулятора, ПИД-контроллеры фирмы Honeywell - ПИД-контроллеры фирмы Honeywell
В подавляющем большинстве ПИД-регуляторов, защищенных патентами, используются методы настройки, основанные на формулах, а не на правилах. Еще меньше...
-
Если линейная система устойчива, то ее переходная функция будет с течением времени стремиться к постоянному значению, а весовая функция - к нулю....
-
Создание модели исследуемой системы - Исследование устойчивости линейной автоматической системы
Структурная схема системы, исследуемой в лабораторной работе, представлена на рис.1. Параметры регулятора K и T будут изменяться в ходе выполнения работы...
-
Управление производством и уровнем запасов - Офисные автоматизированные технологии
Другой сферой при обсуждении вопросов компьютеризации является управление уровнем запасов. Аспекты менеджмента в отношении управления производством и...
-
Для разделения действительной и мнимой частей передаточной функции умножим числитель и знаменатель передаточной функции на комплексно сопряженное число...
-
Основные этапы имитационного моделирования - Имитационные модели информационных систем
Как уже отмечалось, имитационное моделирование применяют для исследования сложных экономических систем. Естественно, что и имитационные модели...
-
Классификация математических моделей - Теоретические основы информационных технологий
К классификации математических моделей можно подходить по-разному, положив в основу классификации различные принципы. 1) Классификация моделей по...
-
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система. Рис. 2 Далее, следуя методическим указаниям,...
-
Запас стійкості по фазі на частоті зрізу . Норми запасів стійкості для надійної роботи САР, рекомендовані у списку використаної літератури, складають -...
-
Судебное разбирательство с Intеl. Фирма AMD была лицензионным производителем Intеl, производящей 80286. AMD объявила, что ее контракт с Intеl позволяет...
-
Устойчивость - Проблемы конструирования устойчивой системы автоматического управления
Перейдем от общих понятий к формализации данного свойства в интересующей нас сфере. В случае нестационарных систем существует множество различных...
-
Узлы оснастки, Конфигурация программ - Настройки групповых политик GPO (Group Policy Object)
В оснастке редактора локальных объектов групповой политики присутствуют два основных узла: * Конфигурация компьютера, который предназначен для настройки...
-
OpenGL - это программный интерфейс к графической аппаратуре. Этот интерфейс состоит приблизительно из 250 отдельных команд (около 200 команд в самой...
-
Рентгеновский симулятор - это аппарат для определения величины и положения (ориентации и удаления от излучателя) области облучения, а также маркирования...
-
Интерфейс, Основные инструменты Adobe Photoshop - Adobe Photoshop
Рисунок 5. Интерфейс 1. Главная панель. Здесь находится весь функционал, заложенный в Photoshop. Начиная с сохранения файла и заканчивая фильтрами и...
-
Собственными называют периодические колебания консервативной системы, совершающиеся исключительно под воздействием инерционных и упругих сил. Для...
-
Теорема Котельникова - Системы цифрового управления
В 1933 году В. А. Котельниковым доказана теорема отсчетов, имеющая важное значение в теории связи: непрерывный сигнал с ограниченным спектром можно точно...
-
Модель бизнес-процесса разрабатывается с использованием его описания, а также таблицы №1 событий и работ, выполняемых при проведении этого процесса....
-
В первую очередь хочется обратить внимание на определение ИТ-консалтинга. В современном контексте он понимается как область предпринимательской...
-
Для того, чтобы строить диаграммы в соответствии с рисунком 2.7, необходимо реализовать алгоритм соединения двух объектов линией. Для отображения линии...
-
Первым вопросом, который необходимо решить при организации охраны коммерческой тайны, является определение круга сведений, составляющих коммерческую...
-
Термины, используемые в техническом задании Web-сайт - в компьютерной сети объединенная под одним адресом совокупность документов частного лица или...
-
Первые процессоры фирмы Intеl - Микропроцессоры для пользователя
За 20-летнюю историю развития микропроцессорной техники ведущие позиции в этой области занимает американская фирма Intеl (INTеgral ЕLеctronics) . До того...
-
Технология работы процессора баз данных фирмы Borland и "клиент-серверная" работа
СУТЬ "КЛИЕНТ-СЕРВЕРНОЙ" РАБОТЫ Различают Клиент-серверные и Файл-серверные системы. Файл-серверные системы реализуются таким образом, что обращение к...
-
На ней - квадратная матрица передаточных функций объекта управления с полюсами и нулями на мнимой оси. - матрица передаточных функций фильтра,...
Запас устойчивости и робастность - ПИД-контроллеры фирмы Honeywell