Расчет параметров, Качество регулирования - ПИД-контроллеры фирмы Honeywell
Перед тем, как рассчитывать параметры регулятора, необходимо сформулировать цель и критерии качества регулирования, а также ограничения на величины и скорости изменения переменных в системе. Традиционно основные качественные показатели формулируются исходя из требований к форме реакции замкнутой системы на ступенчатое изменение уставки. Однако такой критерий очень ограничен. В частности, он ничего не говорит о величине ослабления шумов измерений или влияния внешних возмущений, может дать ошибочное представление о робастности системы.
Поэтому для полного описания или тестирования системы с ПИД-регулятором нужен ряд дополнительных показателей качества, о которых речь пойдет ниже.
В общем случае выбор показателей качества не может быть формализован полностью и должен осуществляться исходя из смысла решаемой задачи.
Качество регулирования
Выбор критерия качества регулирования зависит от цели, для которой используется регулятор. Такой целью может быть:
- - поддержание постоянного значения параметра (например, температуры); - слежение за изменением уставки или программное управление; - управление демпфером в резервуаре с жидкостью и т. д.
Для той или иной задачи наиболее важными могут быть следующие факторы:
- - форма отклика на внешнее возмущение (время установления, перерегулирование, коэффициент затухания и др.); - форма отклика на шумы измерений; - форма отклика на сигнал уставки; - робастность по отношению к разбросу параметров объекта управления; - требования к экономии энергии в управляемой системе; - минимум шумов измерений и др.
Для классического ПИД-регулятора параметры, которые являются наилучшими для слежения за уставкой, в общем случае отличаются от параметров, наилучших для ослабления влияния внешних возмущений. Для того, чтобы оба параметра одновременно были оптимальными, необходимо использовать ПИД-регуляторы с двумя степенями свободы.
Например, точное слежение за изменением уставки необходимо в системах управления движением, в робототехнике. В системах управления технологическими процессами, где уставка обычно остается длительное время без изменений, требуется максимальное ослабление влияния нагрузки (внешних возмущений). В системах управления резервуарами с жидкостью требуется обеспечение ламинарности потока (минимизация дисперсии выходной переменной регулятора).
Ослабление влияния внешних возмущений


Обратная связь ослабляет влияние внешних возмущений в раз за исключением тех частот, на которых. Внешние возмущения могут быть приложены к объекту в самых разных его частях, однако, когда конкретное место неизвестно, считают, что возмущение воздействует на вход объекта. В этом случае отклик системы на внешние возмущения определяется передаточной функцией.

Поскольку внешние возмущения обычно лежат в низкочастотной части спектра, где, и, следовательно, , то предыдущее выражение можно упростить:

Таким образом, для ослабления влияния внешних возмущений (в частности, влияния нагрузки) можно уменьшить постоянную интегрирований.
Во временной области реакцию на внешние возмущения оценивают по отклику на единичный скачок.
Ослабление влияния шумов измерений
Передаточная функция от точки приложения шума на выход системы имеет вид:

Благодаря спаду АЧХ объекта на высоких частотах функция чувствительности стремится к 1. Поэтому ослабить влияние шумов измерений с помощью обратной связи невозможно. Однако эти шумы легко устраняются применением фильтров нижних частот, а также правильным экранированием и заземлением.
Робастность к вариации параметров объекта
Замкнутая система остается устойчивой при изменении параметров объекта на величину, если выполняется условие (4.28).
Критерии Качества Во Временной Области
Для оценки качества регулирования в замкнутой системе с ПИД-регулятором обычно используют ступенчатое входное воздействие и ряд критериев для описания формы переходного процесса:
Максимум ошибки регулирования:

Где момент времени, при котором ошибка достигает этого максимума;
Интегрированная абсолютная ошибка

Интеграл от квадрата ошибки

Декремент затухания - отношение первого максимума ко второму (типовое значение и более):

Отметим, что в литературе встречаются и другие определения декремента затухания, в частности, как или как коэффициент в показателе степени экспоненты, описывающей огибающую затухающих колебаний;
- - статическая ошибка - постоянная ошибка в равновесном (установившемся, статическом) режиме системы; - время установления с заданной погрешностью (время, по истечении которого погрешность регулирования не превышает заданного значения ). Обычно =1%, реже - 2%, 5%. Соответственно, время установления обозначают ; - перерегулирование - превышение первого выброса над установившемся значением переменной. Обычно выражается в процентах от установившегося значения; - время нарастания - интервал времени, в течение которого выходная переменная нарастает от 10% до 90% от своего установившегося значения; - период затухающих колебаний.
Строго говоря, затухающие колебания не являются периодическими, поэтому здесь под периодом понимается расстояние между двумя соседними максимумами переходной характеристики.
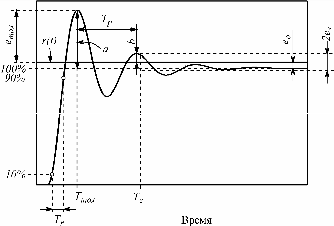
Рисунок 6.1 Критерии качества регулирования во временной области
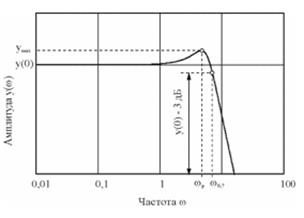
Рисунок 6.2 Критерии качества регулирования в частотной области
Для систем управления движением в качестве тестового сигнала чаще используют не функцию скачка, а линейно нарастающий сигнал, поскольку электромеханические системы обычно имеют ограниченную скорость нарастания выходной величины.
Приведенные выше критерии используются как для оценки качества реакции на изменение уставки, так и на воздействие внешних возмущений и шумов измерений.
Похожие статьи
-
Постоянно растущие требования рынка к снижению времени регулирования, к качеству переходного процесса, к степени ослаблению влияния внешних возмущений и...
-
Идентификация в замкнутом и разомкнутом контуре - ПИД-контроллеры фирмы Honeywell
Идентификацию можно выполнять В Замкнутом Контуре с обратной связью, или В Разомкнутом . Идентификация в замкнутом контуре может быть Прямой и Косвенной...
-
Запас устойчивости и робастность - ПИД-контроллеры фирмы Honeywell
Возможность потери устойчивости является основным недостатком систем с обратной связью. Поэтому обеспечение необходимого запаса устойчивости являются...
-
Идентификация моделей динамических систем - ПИД-контроллеры фирмы Honeywell
Для выполнения качественного регулирования необходимы знания о динамическом поведении объекта управления. Процесс получения (синтеза) математического...
-
Методы синтеза - ПИД-контроллеры фирмы Honeywell
После того, как была определена модель (или некоторая характеристика) объекта, второй шаг заключается в настройки параметров ПИД-регулятора так, чтобы...
-
Частотная идентификация в режиме релейного регулирования - ПИД-контроллеры фирмы Honeywell
Идентификация с помощью широкополосных сигналов, к которым относятся единичный скачок и прямоугольный импульс, не позволяет получить достаточно...
-
Принцип разомкнутого управления - ПИД-контроллеры фирмы Honeywell
Регулятор можно построить и без использования обратной связи. Если известны действующие на систему возмущения и желаемая реакция на изменение...
-
Введение - ПИД-контроллеры фирмы Honeywell
Основной задачей при построении систем автоматического регулирования является правильный выбор, установка, наладка и эксплуатация систем регулирования. В...
-
Описание пакета AutotunerPID Toolkit AutotunerPID Toolkit позволяет: - экспериментировать с хорошо изученными методами настройки, и знакомится с...
-
Интегральное насыщение - ПИД-контроллеры фирмы Honeywell
Рисунок 5.2 Реакция выходной переменной на скачок входного воздействия для ПИ-регулятора при условии ограничения мощности на входе объекта и без...
-
Погрешность дифференцирования и шум - ПИД-контроллеры фирмы Honeywell
Проблема численного дифференцирования является достаточно старой и общей как в цифровых, так и в аналоговых регуляторах. Суть ее заключается в том, что...
-
Особенности реальных регуляторов - ПИД-контроллеры фирмы Honeywell
Описанный выше ПИД-регулятор и его модификации являются теоретическими идеализациями реальных регуляторов, поэтому для их практического воплощения...
-
Блок ПИД - это блок регулятора, который работает как пропорционально-интегрально-дифференциальный (ПИД) регулятор. Он реализует идеальную форму...
-
Выбор тестовых сигналов - ПИД-контроллеры фирмы Honeywell
Для идентификации объекта управления необходимо измерять сигнал на его входе и реакцию на выходе. Для идентификации в частотной области оперируют...
-
Идентификация процесса - ПИД-контроллеры фирмы Honeywell
Первый шаг в процесс автонастройки - определение подходящего описания объекта управления. Далее приводятся два наиболее часто используемых метода поиска...
-
Обзор ПИД-регулятора, ПИД-контроллеры фирмы Honeywell - ПИД-контроллеры фирмы Honeywell
В подавляющем большинстве ПИД-регуляторов, защищенных патентами, используются методы настройки, основанные на формулах, а не на правилах. Еще меньше...
-
Поскольку вывод передаточной функции трехфазного двигателя достаточно громоздкий, предположим, что в погружных насосах скважин используются двигатели...
-
Расчет параметров кода - Кодек каскадного кода Хэмминга
В данном курсовом проекте используется код Хэмминга в качестве внешнего и внутреннего. Код Хэмминга имеет параметры (n, k)=(2m-1;2m-1-m) и обычно...
-
Исходные данные к курсовому проектированию Количество информационных символов k0 = 2 двоичных символа. Количество входов пороговых элементов - 2. Расчет...
-
Расчет коэффициента качества Рассчитаем весовые коэффициенты критериев сравнения (таблица 6.7) и интегрального коэффициента качества. Интегральный...
-
Значение параметра для State, Статуса Выполнения, Команды, метода и свойства метода упомянуты ниже для быстрой ссылки. Таблица 47.1 PUSH блок Функция...
-
Все основные и вспомогательные параметры, используемые при управлении АСУ ККТХ, сведены в таблице. В таблице указаны верхние и нижние границы их...
-
По заданному значению выбираем длину линии и удельное сопротивление линии. = 50 км; Марка провода ЛЭП: АС - 240 1.2 Расчет параметров модели...
-
Создадим структурную схему САУ при помощи пакета Simulink. На рисунке представлена разомкнутая система. Рис. 2 Далее, следуя методическим указаниям,...
-
Ввиду неточности определений характеристик управляемого объекта, неполноты его описания, наличия возмущений различного рода, деградаций самой элементной...
-
В основе алгоритма лежит численное исследование пространства управляемых параметров редуктора. Процесс поиска оптимального решения выполняется за четыре...
-
Для создания наиболее совершенных и экономичных механизмов и машин важно получить оптимальный вариант входящих в них редукторов (МЗП). Показатель, на...
-
Под критическим значением параметра регулятора (K или Т) понимается такое значение (Ккр или Ткр), при котором система оказывается на границе...
-
Анализ результатов расчетов - Оптимизация параметров двухступенчатого цилиндрического редуктора
Таблица 1. Исходные данные к расчету цилиндрической передачи Название Обозначение Величина Крутящий момент на входном валу I, Н-м 300 Частота вращения на...
-
Задача многокритериальной оптимизации формально представляется как задача нелинейного программирования, включающая: процедуру анализа, выбор управляемых...
-
Блок модуля последовательного управления SCM (Sequential Control Module) представляет собой модуль-контейнер для последовательности блоков шагов (STEP) и...
-
Сравнительная технико-экономическая эффективность разработки определяется по формуле: , (10) Где - сравнительная технико-экономическая эффективность...
-
Средства управления и регулирования - Аппаратные средства IBM PC
Под управлением понимают подстройку таких параметров, как яркость, геометрия изображения на экране. Существуют два типа систем управления и регулирования...
-
Реализация базы данных - Разработка мобильного приложения расчета и учета оплаты коммунальных услуг
Для создания таблиц базы данных, структура которой представлена на рис. 21 в программе использовались следующие запросы: CREATE TABLE tariffs ( Tariff_id...
-
Структура кластера и его параметры Вычислительный кластер -- это совокупность компьютеров, объединенных в рамках некоторой сети для решения одной задачи,...
-
При создании проекта нужно указать его свойства: Application Name (название приложения), Project location (расположение проекта на диске), Min SDK...
-
Как было показано в лекции 2, системный анализ представляет собой теоретический метод познания, т. е. информационный процесс, в котором поток информации...
-
Ниже приведен список запросов, исполнение которых описано в разделе "Запросы общие для всех компонентов": EsSetCurrent - Сделать оценку текущим EsAdd -...
-
Без использования измерительных приборов невозможно представить многие грани человеческой деятельности:начиная от научной работы и заканчивая...
-
Определить наилучшие параметры корректирующего устройства следящей системы, обеспечивающих устойчивость системы и выполнение требований технического...
Расчет параметров, Качество регулирования - ПИД-контроллеры фирмы Honeywell