ПИД - регулятор реализован в виде FBD блока в программном обеспечении Experion PKS - ПИД-контроллеры фирмы Honeywell
Блок ПИД - это блок регулятора, который работает как пропорционально-интегрально-дифференциальный (ПИД) регулятор. Он реализует идеальную форму вычисления частей алгоритма ПИД. Идеальная форма часто называется цифровой версией ПИД - регулятора.
Блок ПИД выглядит следующим образом:
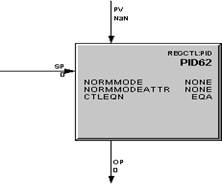
Рисунок 1.1 Блок ПИД регулятора
Блок ПИД имеет два аналоговых входа - переменная процесса (PV) и задание (SP). Разность между PV и SP представляет собой ошибку, и этот блок вычисляет управляющий вход (OP), который должен свести ошибку к нулю.
Поддерживаются следующие уравнения:
- - Пропорциональная, интегральная и дифференциальная (PID) части - по ошибке; - Пропорциональная и интегральная (PI) часть - по ошибке, и дифференциальная (D) часть - по изменению PV; - Интегральная (I) часть - по ошибке, и пропорциональная и дифференциальная (PD) части - по изменению PV; - Только интегральная (I) часть; - Только пропорциональная (P) часть.
Блок PID может использоваться как простой контур регулирования или с несколькими блоками ПИД в каскадной стратегии. На рисунке 1.2 изображены два ПИД - регулятора, используемые в простом каскадном управлении, когда выход регулятора температуры используется как задание для регулятора расхода.
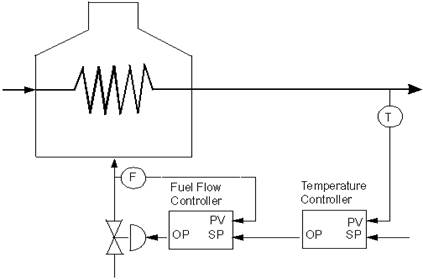
Рисунок 1.2 Пример простого каскадного контура.
Каждый блок ПИД поддерживает следующие конфигурируемые пользователем атрибуты. В приведенной ниже таблице перечислены имена "закладок" в форме конфигурации параметров и краткие описания атрибутов каждой закладки. Эти данные предоставлены только для беглого просмотра.
Уравнения ПИД
Блок ПИД предоставляет пять различных уравнений для вычисления ПИД - алгоритма; для выбора желаемого уравнения используется параметр CTLEQN.
Уравнение A - все три части (пропорциональная, интегральная и дифферен-циальная) работают по ошибке(PV - SP):

Уравнение B - пропорциональная и интегральная части работают по ошибке (PV - SP) и дифференциальная часть работает по изменению PV:
(1.2)

Это уравнение используется для устранения выбросов производной в управлении, возникающих вследствие изменения SP.
Уравнение C - интегральная часть работает по ошибке (PV - SP), а пропорциональная и дифференциальная части работают по изменению PV:
, (1.3)

Где CV= выход блока ПИД в процентах или выход;
K= коэффициент усиления, L-1= обратное преобразование Лапласа;
PV= значение входа от процесса в инженерных единицах измерения;
PVP= PV в процентах;
A=фиксированной амплитуды, s=оператор Лапласа;
SP= значение задания в инженерных единицах измерения;
T1= постоянная интегрирования в минутах, T2= постоянная дифференцирования в минутах;
Это уравнение обеспечивает наиболее плавную и медленную реакцию на изменение SP.
Похожие статьи
-
Общее описание программного обеспечения, реализующего разработанный алгоритм Основной идеей дипломного проекта, является реализация алгоритма...
-
Каждая диаграмма состояний в UML описывает все возможные состояния одного экземпляра определенного класса и возможные последовательности его переходов из...
-
Обзор ПИД-регулятора, ПИД-контроллеры фирмы Honeywell - ПИД-контроллеры фирмы Honeywell
В подавляющем большинстве ПИД-регуляторов, защищенных патентами, используются методы настройки, основанные на формулах, а не на правилах. Еще меньше...
-
Введение - ПИД-контроллеры фирмы Honeywell
Основной задачей при построении систем автоматического регулирования является правильный выбор, установка, наладка и эксплуатация систем регулирования. В...
-
1. НА 7 ПК ИСПОЛЬЗУЕТСЯ microsoft Windows xp sp2. 2. на 1 используется Altlinux 5 3. Программы офисного назначения: A) Microsoft Office Excel 2003 B)...
-
Версионность базы данных - Программное обеспечение для пропускной системы на основе технологии NFC
С ростом приложения существует проблема обновления схемы базы данных с сохранением внесенных данных. Если информация в базе данных не может быть легко...
-
Уже на первых персоналках Xerox двадцать лет назад применялся графический интерфейс, очень похожий на современную графическую среду Windows. С тех пор...
-
Формулировка задания: Составьте программу подсчета числа тех гласных букв в слове X, что не используются в написании слова Z. Описание входных/выходных и...
-
Описание разработанных модулей В разработанной программе имеется 5 модулей. Главный модуль "Program. cs" предназначен для запуска главного окна...
-
ИСТОРИЯ ПОЯВЛЕНИЯ ДВИЖЕНИЯ OPEN SOURSE - Свободное программное обеспечение
История "свободных программ" начинается с одного человека -- Ричарда Столлмана (Richard Stallman). Именно он впервые употребил термин "free software"...
-
Adobe Dreamweaver Adobe Dreamweaver - это HTML-редактор от компании Adobe, который на сегодняшний день очень известный. Первая его версия была выпущена в...
-
Заключение - Программное обеспечение для пропускной системы на основе технологии NFC
Обеспечение удобной пропускной системы - важная и актуальная задача. Появление новых технологий, таких как NFC и HCE, позволяет решить эту проблему. В...
-
Компания MERA Networks - является одним из крупнейших мировых поставщиков услуг в сфере информационно-коммуникационных технологий. MERA предлагает...
-
Необходимо построить базу данных, содержащую информацию о ПО, используемом в ЦЗН. В результате анализа предметной области выявляются документы -...
-
1.1 Характеристика предметной области Программный обеспечение база данные Представим предметную область "Программное обеспечение ЦЗН" как взаимодействие...
-
Вирусы и антивирусное программное обеспечение
Реферативная часть Что такое вирус? Один из известных "докторов" Д. Н Лозинский дал определение вируса на примере клерка. Представим себе аккуратного...
-
Использование linux в наши дни - Свободное программное обеспечение
На сегодняшний день более 75% серверов обеспечивающие надежную работу Интернет работают под управлением Linux. Сервера таких известных компаний как...
-
Установка и системные требования приложения Для установки программы необходимо зайти в папку "Файловый менеджер [Setup]", и запустить файл "setup. exe"....
-
После анализа работающей системы workflow, можно достаточно точно определить, какая из предлагаемых на рынке систем наиболее соответствует потребности...
-
Работа с программой будет начинаться с отображения главного меню программы и дисков компьютера в дереве папок. Далее мы сможем выбрать на какой диск...
-
Платные услуги для ПО с открытым исходным кодом - Свободное программное обеспечение
Для устранения недостатков open source пользователи продуктов объединяются вокруг каждого подобного проекта в сообщества, которые осуществляют...
-
В этой главе представлено описание инструментов и методов, использованных при написании кода программы. Инструменты разработки серверной части Для...
-
Блок TIMER обеспечивает возможность синхронизации событий процесса или создание заданных задержек. На рисунке он имеет следующий вид. Рис. 37.1...
-
Анализ безопасности - Программное обеспечение для пропускной системы на основе технологии NFC
Для обеспечения безопасности системы было решено использовать протокол HTTPS для связи клиента и сервера. Использование протокола HTTPS для коммуникации...
-
Для того, чтобы избежать копирования карты доступа злоумышленниками был введен защитный механизм. Механизм основан на использовании алгоритма RSA....
-
Для реализации поставленной задачи методом конечных элементов будут использованы следующие программные обеспечения (ПО): - MATLAB - ПО и одноименный язык...
-
Программное обеспечение. - Основные термины по информатике
Компьютер - электронное устройство для обработки информации. Составные части компьютера называются его Аппаратным обеспечением . Совокупность...
-
Для администрирования кластера кафедры АИС для организации параллельных процессов было выбрано следующее программное обеспечение. 1. Intel® cluster...
-
Модуль функционирует на персональном компьютере под управлением операционной системы версии Microsoft Windows 7 и выше с поддержкой всех соглашений,...
-
При разработке функций программного обеспечения диалог с пользователем должен быть организован через графический интерфейс. Все элементы графического...
-
Возникновение дистрибутивов - Свободное программное обеспечение
После определенного периода разработки на Linux уже стабильно работал ряд важнейших утилит GNU. Скомпилированное ядро Linux с небольшим комплектом...
-
Особенностью API для коммуникации с СКУД является то, что авторизация методов происходит не с помощью токена, а с помощью проверки IP адреса клиента на...
-
Постановка задачи на разработку программного обеспечения Для того чтобы предлагаемая схема была интегрирована в САПР, который не имеет функции интеграции...
-
Персональный компьютер сегодня является неотъемлемой частью нашей жизни и с каждым годом его влияние лишь усиливается, ведь он действительно создан,...
-
Требования к программному обеспечению системы На сетевом оборудовании должна функционировать межсетевая операционная система, причем ее версия должна...
-
Файл - это набор любых данных одного типа, который хранится на диске отдельно от прочих. Например, музыкальный файл, файл изображения или текстовый файл,...
-
Да, BitLocker поддерживает многофакторную проверку подлинности для дисков операционной системы. Если включить BitLocker на компьютере с доверенным...
-
Выбор средств реализации информационной системы Названные в параграфе 1.4. настоящей работы задачи могут быть решены тремя типами средств автоматизации:...
-
Базы данных (БД) составляют в настоящее время основу компьютерного обеспечения информационных процессов, входящих практически во все сферы человеческой...
-
Информационная система учета ГСМ базируется на техническом, программном, информационном и организационного обеспечения. Техническое обеспечение - это...
ПИД - регулятор реализован в виде FBD блока в программном обеспечении Experion PKS - ПИД-контроллеры фирмы Honeywell