Упрощенная конструкция манипулятора со связанными системами координат - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Для манипулятора робота, состоящего из совокупности звеньев, требуется определить его пространственную конфигурацию с учетом положения всех звеньев. Конфигурация может быть определена путем последовательного описания взаимного расположения соседних звеньев манипулятора. Для этого строятся системы координат связанные с каждым звеном манипулятора. Правила Денавита-Хартенберга предписывают следующую последовательность построения связанных систем координат:
- - ось zi направлена вдоль оси i+1 сочленения; - ось xi перпендикулярна осям zi и zi-1 и направлена от оси zi-1; - ось yi дополняет оси xi и zi до правосторонней прямоугольной системы координат.
Упрощенная конструкция манипулятора со связанными системами координат, построенными по правилам Денавита-Хартенберга, на рисунке 7.
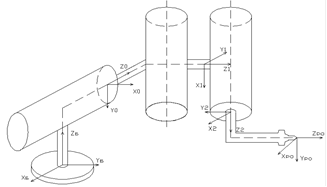
Рисунок 7 - Системы координат, связанные со звеньями манипулятора
Система (xб, yб, zб) - базовая система координат;
- (x0,y0,z0) система координат связанная с 0-ым звеном; (x1,y1,z1) система координат связанная с 1-ым звеном; (x2,y2,z2) система координат связанная со 2-вым звеном; (xро, yро, zро) система координат связанная с рабочим органом.
Похожие статьи
-
Используя полученные геометрические параметры приводов манипулятора, измеряются линейные величины между смежными связанными системами координат и...
-
Заключение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
При выполнении данного курсового проекта мы приобрели навыки в проектировании и конструировании механизмов и деталей робота манипулятора, а также навыки...
-
Рабочая зона представляет собой точки пространства, которые достигаются рабочим органом. Форма рабочей зоны определяется кинематической схемой...
-
В задании на курсовой проект задана технологическая операция - захват. Захват выполняется с помощью схватывающих рабочих органов, которая прикрепляется к...
-
Кинематическая схема манипулятора Два сочлененных звена образуют элементарную составляющую механизма - кинематическую пару. Последовательность попарно...
-
Начало разработки промышленных роботов В начале 1960-х гг. в США были созданы первые в мире промышленные роботы "Юнимейт" (фирма "Юнимейшн", 1961 г.) и...
-
Введение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенное для замены...
-
PUMA (расшифровывается как Programmable Universal Machine for Assembly или Programmable Universal Manipulation Arm) -- промышленный робот-манипулятор,...
-
Манипулятор робот промышленный автоматический Таблица 1 - Технические характеристики робота Основное Осей 6 Привод Постоянного тока Рабочая зона Длины...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Рассмотрим конкретные задачи, которые роботы решают в настоящее время на промышленных предприятиях. Их можно разделить на три основных категории :...
-
В САР поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие...
-
Разработка конструкции литниковой системы - Проект цеха стального литья на 10000 т
При выборе способа подвода расплава в форму и разработке конструкции литниковой системы учитываем, что расплав должен поступать в форму плавно, без...
-
SIMATIC S7-300 - это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Данный...
-
Физическое представление системы управления не может быть полным, если отсутствует информация о том, на какой технологической платформе она реализована....
-
Рассматриваемая ЭМС и ЭМС-аналог содержат асинхронный и шаговый (ШД) электродвигатели соответственно. Каждый из типов электродвигателей имеет свои...
-
Во время усовершенствования холодильников должны решаться следующие задачи: - обеспечение высоких теплозащищающих свойств ограждающих конструкций путем...
-
Потери в стали статора Масса ярма статора: G As =7800- H As - L - K C-р- D A - H As =0,139 кг. Удельные потери в стали 1521 при B =1 Тл и F =400 Гц: P...
-
Частотный метод исследования динамических систем является одним из наиболее простых и научных методов, доступных для инженера. Это обусловлено, прежде...
-
Для построения АЧХ выпишем передаточную функцию замкнутой системы по задающему Найдем комплексную передаточную функцию замкнутой системы: Выражение для...
-
Выбор транспортных средств для заготовок и деталей производим исходя из габаритных размеров деталей, а так же планировкой рабочих мест, расположения...
-
ЗАКЛЮЧЕНИЕ - Расчет надежности технических систем на стадии проектирования (прогнозирующие расчеты)
Результаты анализа особенностей расчетов надежности технических систем на стадии проектирования (прогнозирующих расчетов), полученные в данной работе,...
-
Анализ конструкции изделия на технологичность. Техническая характеристика изделия Рассматриваемая деталь, "вал-шестерня", является частью тяжелого...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Быстрое развитие информационных технологий на предприятиях, обусловлено необходимостью повышения конкурентоспособности производимой продукции, как на...
-
Системный подход позволяет найти оптимальное, в широком смысле, решение задачи Проектирования за счет всестороннего, целостного рассмотрения, как...
-
Модель системы в надсистеме (МСН): Модель системы представляет собой графическое отражение основных элементов подсистемы, в которую входит изучаемый...
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
Аннотация В статье анализируются возможности автоматизации инженерных расчетов изделий машиностроения в среде Autodesk Inventor. Ключевые слова:...
-
Системы автоматизированного проектирования (САПР) в настоящее время являются во многих случаях единственно возможными методами при конструировании новых...
-
В данной работе была рассмотрена и спроектирована система электропривода солнечной батареи по крену для малого космического аппарата, включающая в себя...
-
Одной из важнейших задач на этапе проектирования является правильный выбор номенклатуры нормируемых показателей надежности. Необоснованный выбор...
-
Изучение конструкции тяговой, контактной и рельсовой сетей Классификация электростанций: 1. Тепловые электростанции -- преобразуют химическую энергию...
-
Расчет тока уставки группы №1. Установлена мощность ламп P1 = 8*100 =800 Вт. Рабочий ток I1 равняется: I1 = P1 / U = 800/ 220 =3,64 A Принимаем ток...
-
При создании и эксплуатации автоматических систем необхо-димо стремиться обеспечить заданную, а иногда и максимальную надежность системы при...
-
Себестоимость продукции - это выражение в денежной форме затраты предприятия на производство и реализацию продукции. Себестоимость показывает, во что...
-
Особенности проектирования систем управления ГПС - Виды автоматизированных производств
Состав и структура ГПС определяются содержанием выполняемого производственного процесса, который формируется на основе: конструктивно-технологических...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Технико-экономическое обоснование внедрения АСУ С целью уменьшения процента брака произведенного ППУ необходимо использовать прогрессивные...
-
Заключение - Проектирование производства и систем управления мини-пекарень
Продукцией предприятия в первый год его работы является несколько рзаличных сортов хлебобулочных изделий. Предприятие строится в городе Томске. Выбор и...
Упрощенная конструкция манипулятора со связанными системами координат - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560