Расчетная часть, Кинематическая схема манипулятора - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Кинематическая схема манипулятора
Два сочлененных звена образуют элементарную составляющую механизма - кинематическую пару. Последовательность попарно связанных звеньев замкнута. Звенья и сочленения манипулятора нумеруются по возрастанию от основания к рабочему органу. Нулевое звено соединено с неподвижным основанием, а к последнему звену прикреплен рабочий орган. Каждое сочленение перемещает соответствующее звено, поэтому у нумерации i-тому звену предшествует i-тое сочленение. Звенья манипулятора участвуют в относительном движении, в результате которого достигается определенное положение и ориентация рабочего органа. Перемещение звеньев в пространстве осуществляется при помощи приводов, расположенных, как правило, в сочленениях. Каждая пара, состоящая из звена и сочленения, имеет одну степень свободы, следовательно, манипулятор с n парами "звено-сочленение" имеет n степеней свободы. Таким образом, манипуляторы могут различаться последовательностями и комбинациями вращательных и поступательных сочленений, то есть кинематическими схемами, которые определяют характер основных движений и рабочие зоны манипулятора.
Кинематическая схема манипулятора представляет собой последовательность и комбинации вращательных и поступательных сочленений.
В техническом задании на курсовой проект предложен следующий индекс подвижности манипулятора
ПX - ВY - ПZ.(1)
Эта запись на механическом уровне интерпретируется следующим образом:
ПX - поступательное движение по оси X (1-е звено)
ВY - вращательное движение вокруг оси Y (2-е звено)
ПZ - поступательное движение по оси Z (3-е звено)
Кинематическая схема, соответствующая индексу подвижности ПX - Вy - ПZ представлена на рисунке 2:
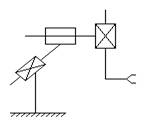
Рисунок 2 - Кинематическая схема манипулятора
Похожие статьи
-
Рабочая зона представляет собой точки пространства, которые достигаются рабочим органом. Форма рабочей зоны определяется кинематической схемой...
-
В задании на курсовой проект задана технологическая операция - захват. Захват выполняется с помощью схватывающих рабочих органов, которая прикрепляется к...
-
Заключение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
При выполнении данного курсового проекта мы приобрели навыки в проектировании и конструировании механизмов и деталей робота манипулятора, а также навыки...
-
Для манипулятора робота, состоящего из совокупности звеньев, требуется определить его пространственную конфигурацию с учетом положения всех звеньев....
-
Используя полученные геометрические параметры приводов манипулятора, измеряются линейные величины между смежными связанными системами координат и...
-
Введение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенное для замены...
-
Манипулятор робот промышленный автоматический Таблица 1 - Технические характеристики робота Основное Осей 6 Привод Постоянного тока Рабочая зона Длины...
-
Начало разработки промышленных роботов В начале 1960-х гг. в США были созданы первые в мире промышленные роботы "Юнимейт" (фирма "Юнимейшн", 1961 г.) и...
-
PUMA (расшифровывается как Programmable Universal Machine for Assembly или Programmable Universal Manipulation Arm) -- промышленный робот-манипулятор,...
-
КИНЕМАТИЧЕСКИЕ СХЕМЫ РЕДУКТОРОВ - Расчет валов редуктора
На рисунках 2, 3 и 4 представлены в аксонометрии кинематические схемы ряда широко распространенных двухступенчатых редукторов различной конструкции,...
-
Составление структурной схемы Конвейерная линия на установки "Cannon Viking Maxfoam" представляет собой ограниченное по краям пространство, вследствие...
-
Звенья Моменты инерции [кгм2 ] Звено 1 - невесомый тонкий стержень IS1 =0 Звено 2 - тонкий стержень IS2 =8*10-3 Звено 3 - поступательное движение IS3 =0...
-
При обработке на металлорежущих станках очертания, форма деталей (производящие линии) образуется в результате согласованных между собой вращательных и...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Рис.2. Принципиальная схема сортировочно-инспекционного конвейера ТСИ Конвейер сортировочно-инспекционный ТСИ предназначен для сортировки плодов и ягод...
-
Типы соединений Существуют различные типы входов и выходов. Один может получать сигналы с датчиков и выключателей, другой - получать сигнал напряжения,...
-
Определение размеров кривошипа и шатунов Радиус кривошипа LOA =r определяется через ход поршня Н по формуле R =H/2 (2) Длины шатунов LAB = lAC =l...
-
Структурный анализ рычажного механизма - Исследование рычажного механизма долбежного станка
Задачи структурного анализа: Определить количество звеньев и их название (для плоского механизма); А) Определить число, класс, название кинематических...
-
Выбор схемы базирования и описание работы приспособления Анализируя техническое задание, эскиз детали под выполняемую операцию из ГОСТ 21495-76 выбираем...
-
Структура системы управления организацией Структура системы управления организацией - упорядоченная совокупность взаимосвязанных элементов, находящихся...
-
На рисунке 2.7 представлена принципиальная схема системы электропривода, а также на рисунке 2.8 его структурная схема. Рисунок 2.7- Принципиальная схема...
-
Теория автоматического управления (ТАУ) -- научная дисциплина, предметом изучения которой являются информационные процессы, протекающие в автоматических...
-
Рассмотрим конкретные задачи, которые роботы решают в настоящее время на промышленных предприятиях. Их можно разделить на три основных категории :...
-
Нам дана кинематическая схема зубофрезерного станка, работающего по методу обката (деления) червячной фрезы. Рис. 1. Кинематическая схема зубофрезерного...
-
Разработка привода ротора измельчителя Разработка кинематической схемы Кинематическая схема роторного привода представлена на рисунке 2.1 Рисунок 2.1 -...
-
Силовые механизмы обычно выполняют роль усилителя. Его основной характеристикой является коэффициент усиления i (передаточное отношение сил). . (8)...
-
В приспособлениях силы трения возникают на поверхностях контакта заготовки с опорными и зажимными элементами. Величина коэффициента трения (зависит от...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Составление расчетной схемы и исходного уравнения для расчета зажимного усилия Силовой расчет станочных приспособлений можно разбить на следующие этапы:...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Городские сети низкого давления, распределяющие газ по всей территории застройки, представляют собой сложную по конфигурации систему сопряжения колец,...
-
Функциональные задачи Cистема электроприводов должна обеспечивать повороты правого и левого крыльев солнечных батарей по крену, а также иметь оговоренные...
-
В процессе выполнения курсового проекта использованы ссылки на следующие нормативные документы: ГОСТ Р 1.5-2002 ГСС РФ. Стандарты. Общие требования к...
-
На структурной схеме системы электропривода регулятор скорости с передаточной функцией (2.6) выглядит следующим образом (рисунок 2.3): Uз U UAR - UR...
-
Описание механизма МЕХАНИЗМ представляет собой 6-тизвенный рычажный механизм. КИНЕМАТИЧЕСКАЯ СХЕМА механизма показана на рис.1: Звено 1 - Ведущее -...
-
Введение - Разработка автоматизированной системы управления промышленной холодильной установкой
Современный уровень производства пищевых продуктов характеризуется с одной стороны увеличением урожайности полей за счет введения новых урожайных сортов...
-
Исходные допущения и предпосылки Блок согласования каналов (БСКЛ) предназначен для работы на усилительных пунктах и объединения выходов нескольких...
-
Кинематическая схема долбежного станка - Долбежные станки
На рис. 3 приведена кинематическая схема долбежного станка. Привод главного движения долбяка Долбяк приводится в движение от электродвигателя в следующей...
-
Алгоритм расчета надежности технических систем на этапе проектирования На этапе проектирования расчет надежности производится с целью прогнозирования...
-
Схема размещения технологического оборудования - это расположение технологического оборудования и рабочих мест на производственной площади. В курсовом...
Расчетная часть, Кинематическая схема манипулятора - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560