Форма, размеры и расположение рабочей зоны - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Рабочая зона представляет собой точки пространства, которые достигаются рабочим органом. Форма рабочей зоны определяется кинематической схемой манипулятора, а ее размеры - размерами звеньев манипулятора и размерами приводов.
Определяем размеры приводов манипулятора. В качестве привода в манипуляторе используется цилиндр двустороннего действия, который обеспечивает поступательное перемещение поршня в одном из двух противоположных направлений. Цилиндр и поршень естественным образом составляют кинематическую пару, элементы которой соединены поступательным сочленением. В пневматическом приводе движущее усилие создается воздухом нагнетаемым под давлением. Воздух заставляет поршень двигаться прямолинейно относительно цилиндра.
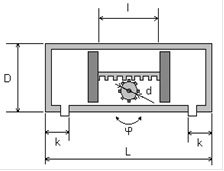
Для реализации поступательного движения применяется конструкция, изображенная на рисунке 3.
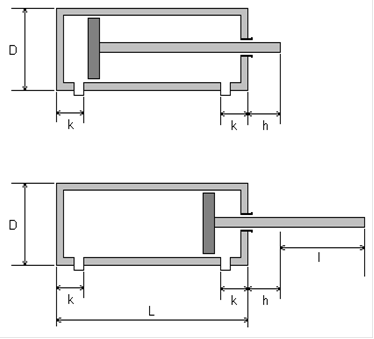
Рисунок 3 - Привод поступательного перемещения


Обычно конструктивные элементы принимают значения. Диаметр цилиндра выбирается из диапазона. В данном случае l - заданное перемещение, поэтому размеры k, h, L, D рассчитываются индивидуально для каждого привода.

Рассчитаем размеры привода 1-го звена (ПX):

Длина звена:


(2)
Диаметр цилиндра:

Выбираем
Рассчитаем размеры привода 3-го звена (ПZ):


(3)

Длина звена:


(4)
Диаметр цилиндра

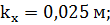
Для реализации вращательного движения применяется конструкция, изображенная на рисунке 4.
Рисунка 4 - Поворотный привод
Рассчитаем размеры поворотного привода 2-го звена (Вy):
Величина хода поршня:
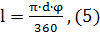
Где d выбирается из диапазона 0,2 D < d < 0,5 D.
Выбираем d = 0,05 м.
Величина хода поршня:
Длина звена:


.(7)
Где k=0,05 м, как у первого привода.
Длина звена:

(8)
Диаметр цилиндра для выбранного d= 0,05 м:

Длина нулевого звена манипулятора, связывающего основание с первым приводом, берется в данном случае произвольно, и равна 0,225 м.
Размер рабочего органа также выбраны произвольно, высота равна 0,25м а длина 0,5 м в соответствий с рисунком 5.
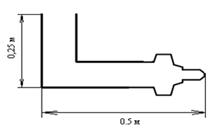
Рисунок 5 - Рабочий орган манипулятора
Рабочая зона, соответствующая параметрам разрабатываемого манипулятора, представлена на рисунке 6.
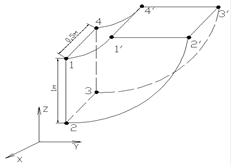
Рисунок 6 - Рабочая зона манипулятора
Похожие статьи
-
Кинематическая схема манипулятора Два сочлененных звена образуют элементарную составляющую механизма - кинематическую пару. Последовательность попарно...
-
В задании на курсовой проект задана технологическая операция - захват. Захват выполняется с помощью схватывающих рабочих органов, которая прикрепляется к...
-
Используя полученные геометрические параметры приводов манипулятора, измеряются линейные величины между смежными связанными системами координат и...
-
Для манипулятора робота, состоящего из совокупности звеньев, требуется определить его пространственную конфигурацию с учетом положения всех звеньев....
-
Введение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенное для замены...
-
Заключение - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560
При выполнении данного курсового проекта мы приобрели навыки в проектировании и конструировании механизмов и деталей робота манипулятора, а также навыки...
-
Начало разработки промышленных роботов В начале 1960-х гг. в США были созданы первые в мире промышленные роботы "Юнимейт" (фирма "Юнимейшн", 1961 г.) и...
-
Манипулятор робот промышленный автоматический Таблица 1 - Технические характеристики робота Основное Осей 6 Привод Постоянного тока Рабочая зона Длины...
-
PUMA (расшифровывается как Programmable Universal Machine for Assembly или Programmable Universal Manipulation Arm) -- промышленный робот-манипулятор,...
-
Рассмотрим конкретные задачи, которые роботы решают в настоящее время на промышленных предприятиях. Их можно разделить на три основных категории :...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Наибольшие пусковые ток и момент определяются из условий: I Пуск =(1,5ч2)-I Н =2- I Н =2-37=74 А; М Пуск =с- I Пуск =2,17-74=160,44 Н-м. Ток и момент...
-
Размеры корпуса, Привод передачи - Проектирование домкрата
Высота корпуса, мм (см. рис.3) . Внутренний диаметр корпуса у основания, мм; Где Наружный диаметр корпуса у основания из расчета на удельные давления, мм...
-
После описания звеньев системы определяем ее передаточную функцию, которая представляет собой произведение всех ПФ звеньев: (2.10) Подставляем в...
-
Сжатые винты проверяют на устойчивость по условию устойчивости: , Где - расчетный коэффициент запаса устойчивости; - допускаемый коэффициент запаса...
-
Напряжения в трубопроводе в переходных зонах
Аннотация Методом математического моделирования с учетом взаимодействия грунта с подземной трубой исследованы закономерности формирования...
-
Во второй группе проб показатели горячеломкости отражают и размеры трещин, и размеры образца. Одновременный учет обеих этих характеристик производится...
-
Общий припуск z0 равен сумме всех промежуточных припусков zI. Поэтому для каждой обрабатываемой детали можно записать: , Где - число технологических...
-
Единая система допусков и посадок - ЕСДП (ГОСТ 25346-82 и ГОСТ 25347-82) регламентирована стандартами СЭВ и в основном соответствует требованиям...
-
Описание задачи проектирования Данная система предназначена для установки "Cannon Viking Maxfoam", которая в свою очередь предназначена для производства...
-
Вентиляцией называется комплекс взаимосвязанных устройств и процессов для создания требуемого воздухообмена в производственных помещениях. Основное...
-
Определение формы и габаритных размеров упаковки Для разработки развертки и штанцевальной формы картонной упаковки для пищевой отрасли была выбрана...
-
ГИДРАВЛИЧЕСКИЙ РАСЧЕТ ССД - Проектирование системы газоснабжения
Задачей данного расчета является определение диаметров газопроводов для найденных максимальных часов (расчетных) расходов газа, а также гидравлического...
-
Расчет численности производственных рабочих - Проектирование автотранспортного предприятия
К производственным рабочим относятся рабочие зон и участков, непосредственно выполняющие работы по ТО и ТР подвижного состава. Технологическое число...
-
Введение - Разработка автоматизированной системы управления промышленной холодильной установкой
Современный уровень производства пищевых продуктов характеризуется с одной стороны увеличением урожайности полей за счет введения новых урожайных сортов...
-
Активное сопротивление обмотки статора Для четырехполюсной машины с неизолированными лобовыми частями: K 1=1,25; B =1 мм. Зубцовое деление, отнесенное к...
-
В последнее время наметился спрос на малые космические аппараты (МКА), которые могут выполнять различные задачи, как военного, так и мирного назначения....
-
Проверка на самоторможение, Определение размеров гайки - Проектирование домкрата
Под самоторможением понимается обеспечение невозможности самопроизвольного движения винта под действием рабочей нагрузки. Для обеспечения самоторможения...
-
1) Коэффициент суммы смещений X=X1+X2=0; 2) Торцовой профильный угол ; 3) Торцовой модуль ; 4) Диаметры делительных окружностей: Шестерни мм.; Колеса...
-
Определение размеров резьбы по условию износостойкости - Проектирование домкрата
Так как основной причиной выхода из строя винтовых механизмов является износ резьбы гайки, то диаметр винта определим из условия износостойкости [1,2,3]....
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Для обеспечения удовлетворения запросов и предпочтений большего числа потребителей планируется выпускать несколько наименований хлебобулочных изделий:...
-
Влияние состава и структуры на горячеломкость при литье сплавов Влияние формы и размеров зерен на горячеломкость Измельчение зерна - это один из хорошо...
-
Потери в стали статора Масса ярма статора: G As =7800- H As - L - K C-р- D A - H As =0,139 кг. Удельные потери в стали 1521 при B =1 Тл и F =400 Гц: P...
-
В ходе выполнения курсового проекта были найдены 12 альтернативных вариантов производственной структуры поточной линии и рассчитаны их основные...
-
Выбор точности заготовки зубчатого колеса Требования точности заготовок зависят от принятого технологического процесса обработки и методов измерения...
-
Барабаны диаметром меньше 100 мм исключают из дальнейших расчетов, т. к. наименьший из выходных валов редукторов с частью зубчатой полумуфты,...
-
Определим площадь общего воздуховода (от воздуходувки до "развилки" на воздуховоды для нижнего и верхнего фурменных поясов). Для расчета принимаем расход...
-
Кожух печи выполняется сварным или клепаным из листового железа толщиной 10-30 мм. Он должен обладать достаточной прочностью, чтобы выдержать футеровку,...
-
Конструктивные схемы крепления валов перемешивающих устройств В большинстве аппаратов химической технологии с целью интенсификации проводимых процессов...
Форма, размеры и расположение рабочей зоны - Проектирование механической системы промышленного робота манипулятора Unimate Puma 560