Расчет частоты и напряжения двигателя в системе ПЧ-АД при работе в заданной точке, Расчет частоты и тока статора двигателя в системе источник тока - асинхронный двигатель (ИТ-АД) - Проектирование электропривода цепного транспортера
При питании асинхронного двигателя от преобразователя частоты в процессе преобразования напряжения промышленной частоты в напряжение регулируемой амплитуды и регулируемой частоты возникают потери напряжения и мощности в преобразователе. Обычно такие преобразователи имеют внутренние обратные связи, и при изменении нагрузки двигателя выходное напряжение и частота практически не изменяются. Поэтому в дальнейшем напряжение и частоту на статоре двигателя будем считать независящими от нагрузки.
Синхронная скорость двигателя щ0 зависит от частоты питающей сети f1 и числа пар полюсов рn:
Для устойчивой работы двигателя необходимо при изменении частоты поддерживать перегрузочную способность двигателя, что обеспечивается регулированием напряжения на статоре по различным законам в зависимости от частоты и от характера изменения статического момента. Эти особенности необходимо учитывать при расчете частоты и амплитуды напряжения.
Частота напряжения в заданной точке:

Расчет частоты и тока статора двигателя в системе источник тока - асинхронный двигатель (ИТ-АД)
При работе двигателя в режиме частых пусков и торможений большое значение имеют условия формирования пусковых и тормозных моментов. Механические характеристики асинхронного двигателя при питании от преобразователя частоты, работающего в режиме автономного источника напряжения, существенно снижают критический момент в зоне малых частот. Здесь существенно влияет активное сопротивление обмотки фазы статора r1. Для увеличения момента в зоне малых частот приходится повышать напряжение на статоре.
При питании статора двигателя от источника тока величина тока статора не зависит от нагрузки двигателя, а определяется лишь управляющим воздействием. Для предварительного расчета принимают Мкт =(2...3)Мзад, обеспечивая этим перегрузочную способность двигателя, и определяют величину тока статора
Механические характеристики строят по формуле
;
Характеристика M=f(S) приведена на рисунке 8.
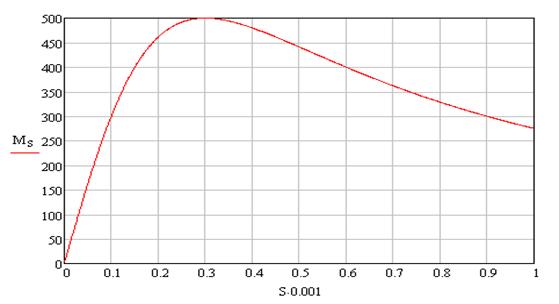
Рисунок 8 Характеристика M=f(S) асинхронного двигателя
Механическая характеристика двигателя строится по 4 основным точкам (см. рисунок 9).
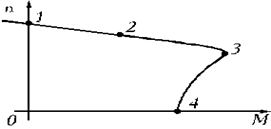
Рисунок 9 Основные точки механической характеристики двигателя
Точка 1: n0 = (60 f) / p, Точка 2 с координатами nН и МН. Номинальная частота вращения nН задается в паспорте. Номинальный момент рассчитывается по формуле:
Точка 3 с координатами МКр nКр. NКр = n0 (1 - SКр),
Точка 4 имеет координаты n=0 и М=МПуск. Пусковой момент вычисляют по формуле МПуск = МН лПуск Механическая характеристика двигателя приведена на рисунке 10.
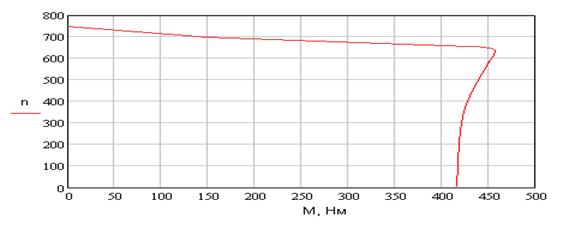
Рисунок 10 Механическая характеристика асинхронного двигателя
Похожие статьи
-
Естественные характеристики асинхронного двигателя Наиболее точной механической характеристикой асинхронного двигателя является каталожная зависимость...
-
Рис. 3.3. Схема замещения фазы асинхронного двигателя Полное сопротивление разветвления: Z R '( S ) = R R '( S ) + j* X R '( S ). Полное сопротивление...
-
Сопротивление якоря горячее. Ом, Где ф= 75°С - перегрев обмоток двигателя относительно начальной температуры (15°С). Коэффициент полезного действия при...
-
Электрическое преобразование энергии выполняют различные устройства: тиристорные и транзисторные преобразователи переменного тока в постоянный,...
-
Математическое описание асинхронного двигателя при наличии шести обмоток на статоре и роторе с учетом их взаимного расположения, множества связей между...
-
ВЫБОР ПРЕОБРАЗОВАТЕЛЯ ИЛИ СТАНЦИИ УПРАВЛЕНИЯ - Проектирование электропривода цепного транспортера
Комплектный тиристорный электропривод включает в себя: - электродвигатель; -силовой трансформатор (или токоограничивающий реактор); -силовой тиристорный...
-
Исходные данные Исходными данными для проектирования статического преобразователя электрической энергии являются параметры применяемого асинхронного...
-
Механическая характеристика асинхронного двигателя - Асинхронный двигатель
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при...
-
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки. При...
-
Расчет мощности и выбор электродвигателей установки Асинхронные электродвигатели для привода формовочной машины выбирают так, чтобы обеспечить наилучшее...
-
На этапе предварительного расчета мощности электродвигателя по заданным техническим показателям рабочей машины были рассчитаны статические и динамические...
-
Расчет моментов при движении с грузом: Масса всех движущихся частей Равновесная масса - момент сил трения в подшипниках - момент трения качения...
-
Исходные данные Исходные данные для проектирования асинхронного двигателя сведены в табл. 3.1. Табл. 3.1 Исходные данные № п/п Параметр Буквенное...
-
Расчет переходных процессов проводим по выражениям: , , , Где МНач, IНач, щНач - начальные значения соответственно момента, тока и скорости; МКон, IКон,...
-
Векторное регулирование асинхронного электропривода
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА Принято различать два основных способа управления электроприводами переменного тока, использующими в...
-
Принцип действия рассматриваемого электропривода состоит в следующем: при отклонении положения панели СБ от оптимального положения относительно светового...
-
Расчет силовой части электропривода и выбор оборудования - Скиповой электропривод
Выбор двигателя. В главе Специальной части данного проекта в п. 1.3 был предварительно произведен выбор двигателя, а пункте 1.7 произведена проверка...
-
Структурная схема механической части электропривода Механическая часть электропривода включает в себя движущиеся массы двигателя, передачи и рабочей...
-
Расчет времени переходных процессов: Движение с грузом: - при пуске - при торможении Движение без груза: - при пуске - при торможении Расчет угла...
-
Электрическим двигателям называется машина, преобразующая электрическую энергию в механическую. Применяемые в настоящее время двигатели могут быть...
-
При реактивном характере нагрузки производственного механизма примем вид торможения - динамическое. Расчет механической характеристики при динамическом...
-
Тормозные режимы работы - Асинхронный двигатель
Работа многих производительных механизмов состоит из трех этапов: пуска в ход, технологической операции и торможения. После отключения двигателя...
-
Стандарт BTX, который по прогнозам, в ближайшие два года станет основным форм-фактором при производстве персональных компьютеров, требует и новых систем...
-
Регулирование изменением частоты вращения вала - Расчет напора жидкости в насосе и трубопроводе
Для определения новой частоты вращения построим параболу подобия (рисунок 11). Рассчитаем коэффициент параболы подобия через координаты точки B': A = = =...
-
Проверочный расчет зубчатых колес - Проектирование и применение токарного станка модели 1К660Ф3
Проверочный расчет по контактным и изгибным напряжениям, который произведем с помощью ЭВМ, позволяет одновременно производить анализ работоспособности...
-
Ориентировочный расчет ведомого вала Диаметр вала определим по формуле: , Где Т2 = 30 Нм. 1,5-10-2 = 15 мм. DБП dп + 3,2r = 22 мм, Где r - радиус...
-
Построение внешней скоростной характеристики двигателя - Тяговый расчет Урала 4320
Автомобиль движется под воздействием на него сил и моментов, которые разделяют на движущие и оказывающие сопротивление движению. Основной движущей силой...
-
Способы изменения направления тока - Разработка стенда управления шаговым двигателем
При работе шагового двигателя требуется изменение направления маг-нитного поля независимо для каждой фазы. Изменение направления магнит-ного поля может...
-
Стабилизация тока и скорость спада тока - Разработка стенда управления шаговым двигателем
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рас-сеиваемую мощность...
-
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют...
-
Для грузового лифта выбираем асинхронный двигатель с короткозамкнутым ротором, номинальные данные которого определены для повторно-кратковременного...
-
ВВЕДЕНИЕ - Проектирование электропривода цепного транспортера
Мехатронная система (МС) -- это неразделимая совокупность механических, электромеханических и электронных узлов, в которых осуществляется преобразование...
-
Кинематическая схема Рис. 1 - Кинематическая схема Выбор двигателя. Кинематический расчет привода Определение мощности и частоты вращения двигателя 1....
-
Введение, Кинематический и силовой расчет привода - Проектирование привода ленточного транспортера
Спроектировать привод ленточного транспортера. Привод включает: электродвигатель -1; муфта -2; одноступенчатый конический редуктор -3; ременная передача...
-
Предварительно выбранную цепь проверяют на прочность, определяя коэффициент запаса прочности, , Допускаемое значение коэффициента запаса прочности...
-
Задача светотехнического расчета определить потребляемую мощность источников света для обеспечения нормированной освещенности. В результате прямого...
-
Выбор двигателя и коммутационной аппаратуры - Расчет и проектирование бытового электровентилятора
1. Определяем полезную мощность вентилятора N, Вт , Где - КПД двигателя вентилятора и - КПД крыльчатки, предварительно выбраны /1/. . 2. Давление,...
-
Конструирование корпуса. Боковые крышки корпуса крепим к корпусу болтами. Диаметры болтов принимаем по формуле: Где Т - вращающий момент на тихоходном...
-
Для определения возможных установившихся режимов работы главной энергетической установки выполним графическое совмещение характеристик двигателя с...
-
Данные для построения: NМ1 =-35 об/мин - частота вращения в 1 рабочей точке; T1 = 20 с - время работы в 1 точке; NМ2 = 95 об/мин - частота вращения в 2...
Расчет частоты и напряжения двигателя в системе ПЧ-АД при работе в заданной точке, Расчет частоты и тока статора двигателя в системе источник тока - асинхронный двигатель (ИТ-АД) - Проектирование электропривода цепного транспортера