Обзор научно-технических и патентных источников, Обзор научные литературы по импульсному регулирование АД - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
Обзор научные литературы по импульсному регулирование АД
Управление - это воздействие на объект, направленное на достижение поставленной цели. Цель управления поездом - это перемещение его от начальной до конечной станции за установленный расписанием промежуток времени при обеспечении безопасности движения и минимальном расходе энергии. Для этого скорость поезда V должна изменяться в определенной зависимости от пройденного пути.[2,3,4,5].
Поставленная цель будет достигнута, если локомотив реализует силу тяги FK, Достаточную для преодоления силы сопротивления движению поезда W и для создания требуемого ускорения поезда DV/dt. При необходимости снизить скорость поезда (DV/dt<0) потребуется создание тормозной силы В, Направленной встречно вектору скорости V.
Возможности локомотива по реализации сил тяги и торможения определяются его тяговыми и тормозными характеристиками, которые представляют собой зависимости FK(V) И B(V) И имеют ограничения по силам FK и В, Определяемые параметрами локомотива.
Задача управления ЭПС сводится к созданию определенных режимов работы тяговых электродвигателей (ТЭД), при которых обеспечиваются требуемые значения силы тяги FK (или тормозной силы В) при заданных скоростях движения V. Режим работы ТЭД определяется напряжением на его зажимах UД, током возбуждения IВ, а для ТЭД переменного тока - еще и частотой FД [6,7].
Совокупность устройств, предназначенных для изменения режима работы ТЭД, называется системой управления ЭПС (СУ ЭПС). Первой основной функцией СУ ЭПС является регулирование режима работы ТЭД, с целью обеспечения движения поездов в соответствии с расписанием [2,4].
Система электроснабжения электрической железной дороги (ЭЖД) обеспечивает подвод электроэнергии к токоприемнику ЭПС. Известно, что капитальные затраты на сооружение системы электроснабжения и ежегодные потери энергии в ней можно уменьшить используя более высокое номинальное напряжение контактной сети.
Однако при этом становится невозможным непосредственное питание тяговых электродвигателей от контактной сети, поскольку напряжение на ТЭД не должно превышать 1500 В, а оптимальные параметры ТЭД достигаются при UД = 700...1000 В. Поэтому второй основной функцией СУ ЭПС является преобразование напряжения контактной сети UC и рода тока в ней, характеризуемого частотой контактной сети FС, в напряжение и род тока, целесообразный для ТЭД (UД И FД).
Кроме этого, СУ ЭПС должна выполнять следующие дополнительные функции [4,8]:
- -ограничение скорости движения, сил тяги и электрического торможения в соответствии с параметрами ЭПС и требованиями безопасности движения; -защита электрооборудования от повреждений и опасных режимов; -обеспечение воздушного охлаждения электрооборудования и подача сжатого воздуха для пневматических приводов; -автоматизация управления ЭПС.
Для выполнения основных и дополнительных функций системы управления ЭПС в соответствии с условиями движения поезда необходимо переключение режимов работы СУ ЭПС. Эти переключения осуществляет машинист, который в своих действиях должен учитывать режимы работы ТЭД (UД, IД, IВ) и системы электроснабжения (UC), условия движения поезда (V, dV/dt, i, S), А также требования безопасности движения.
Наименьший расход энергии при заданном времени хода обеспечивает режим движения поезда с постоянной скоростью V = Const. Однако на разных участках пути требуется реализовать различные значения скорости. В частности, перед отправлением поезда, а также после его остановки V=0. Поэтому возникает необходимость перехода от одного установившегося значения скорости к другому. Для изменения скорости рекомендуется равноускоренное или равнозамедленное движение DV/dt=const (рис.1.1).
Необходимо учитывать, что внезапное изменение величины ускорения воспринимается как удар, создающий дополнительные нагрузки на конструкцию подвижного состава и вызывающий неприятные ощущения у людей, находящихся в поезде. Поэтому следует предусматривать плавное изменение ускорения, поддерживая постоянным темп изменения ускорения D2V/dt2 = const. При служебном и регулировочном торможении следует принимать DV/dt = 0,5 м/с2 и D2V/dt2 = 0,25 м/с3, а при экстренном - DV/dt = 2,2 м/с2 и D2V/dt2 = 10 м/с3 [2,8].
Таким образом, система управления должна предусматривать три основных режима движения поезда: V = Const, DV/dt = Const и D2V/dt2 = const. С учетом реальной формы тяговой характеристики и применения выбега зависимость V(t) Будет иметь вид, показанный на рис.1.1 штриховой линией.
Как известно, установившаяся скорость движения поезда определяется точкой пересечения характеристики полного сопротивления движению W(V) И тяговой F(V) (точка У на рис.1.2,А). Чтобы при той же скорости поезд имел ускорение DV/dt, Сила тяги должна быть равна FZ = FY + (1 + Г) MП DV/dt (точка Z). Здесь MП - масса поезда, 1 + г - коэффициент инерции вращающихся частей.
Требуемые значения скорости движения поезда задаются необходимой скоростью сообщения, условиями безопасности движения, а также вариацией сопротивления движению, массы поезда и профиля пути. Разнообразие условий движения поезда ставит перед СУ ЭПС требование обеспечить возможность реализации режимов, соответствующих любым точкам в пределах существующих ограничений тяговой характеристики ЭПС FK(V) (рис.1.2,Б) по сцеплению - 1, По скорости - 2 и по допустимому режиму работы ТЭД - 3.
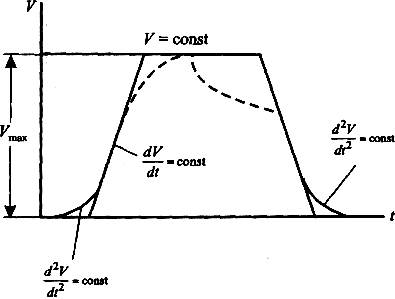
Рис.1.1 Режимы движения поезда
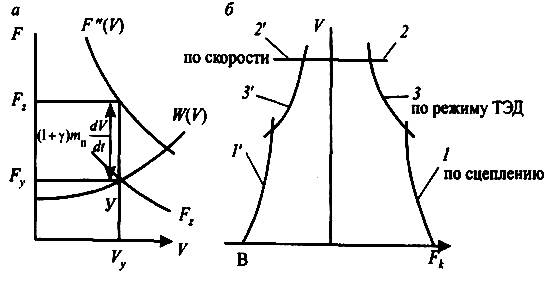
Рис. 1.2. Реализация режимов движения поезда:
А - определение скорости движения поезда;
Б - ограничение тяговых и скоростных характеристик;
Аналогичные ограничения имеют место и для тормозных характеристик B(V) (1'; 2' И 3' На рис.1.2,Б).
Это требование выполняется полностью только при плавном регулировании режима работы ТЭД. Так, например, для поддержания постоянства скорости V1=const С Поездами различной массы на подъемах различной крутизны необходимо при этой скорости плавно регулировать силу тяги в пределах от F1 до 0.
При ступенчатом регулировании скорости вариация сопротивления движению требует перехода с одной тяговой характеристики на другую, вследствие чего установившаяся скорость VУст может принимать любое значение в пределах V2?VУст?V1.
Равноускоренное движение поезда чаще всего реализуется при пуске, когда скорость поезда должна возрасти от 0 до V3. Система управления с плавным регулированием режима работы ТЭД должна обеспечивать постоянство силы тяги F3= const в этом диапазоне изменения скорости.
Ступенчатое регулирование силы тяги за счет перехода с одной тяговой характеристики на другую сопровождается изменением силы тяги F в пределах F4?F?F3.
Поскольку на ЭПС отсутствуют приборы, измеряющие непосредственно силу тяги, то о ее величине обычно судят по косвенному показателю - по току тягового электродвигателя I, который связан с силой тяги F известным соотношением
F = СФI,
Где С - постоянный коэффициент, зависящий от параметров ТЭД и тяговой передачи; Ф - магнитный поток ТЭД.
Похожие статьи
-
Введение - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава
Актуальность темы исследований. Ведущее место в транспортной системе Республики Узбекистан занимают железные дороги. Они имеют важнейшее государственное,...
-
Определение по тяговой характеристике максимальной силы тяги локомотива Чтобы определить силу тяги локомотива при различных скоростях движения,...
-
Вибрация - Конструирование и расчет двигателей внутреннего сгорания
Вибрация - это механическое колебательное движение системы с упругими связями; движение точки или механической системы, при котором происходит...
-
Обзор литературы и патентные исследования - Передатчик спутниковой радиосвязи
При выполнении курсового проекта потребовалось обратиться к различным источникам информации, был рассмотрен материал, изложенный в специальных учебных...
-
- Коэффициент, учитывающий изменение условий охлаждения по длине поверхности корпуса, обдуваемого наружным вентилятором (6 - 341,[1]) : - Коэффициент...
-
Каждый отремонтированный двигатель должен пройти процесс обкатки, только тогда новые и восстановленные детали, особенно блоки цилиндров, поршни,...
-
Характеристика производственного участка и технологического процесса по сервисному обслуживанию объекта (Диагностика(д) ТО и ремонт(р). Автосервис имеет...
-
1-3 подъемника грузоподъемностью до 4т 2- компьютерный диагностический комплекс Siemens Vas 5052 Современный диагностический на базе персонального...
-
Режимы работы амортизаторов Дроссельный и клапанный режимы - работа амортизатора, соответственно, с закрытыми и открытыми (открывающимися) клапанами. На...
-
При выполнении полета на самолете Ту154 в результате выгорания топлива масса самолета уменьшается. Уменьшение полетной массы вызывает значительное...
-
Датчики давления монтируются внутрь каждого колеса. Это не требует деформации покрышки и диска. Датчики передают информацию на пульт управления с помощью...
-
На колесных ТС, предназначенных для эксплуатации на дорогах с твердым покрытием, грунтовых дорогах различного состояния, можно применять систему...
-
Введение - Система охлаждения двигателя с электронным регулированием
При сгорании топлива, когда двигатель работает с полностью открытой заслонкой, максимальная температура сгорающих газов может достигать величины 1500 -...
-
После восстановления и ремонта составных частей необходимо произвести комплектацию деталей с целью обеспечения комплектности для дальнейшей операции...
-
Восстановление гильз цилиндров производится по известной технологии, а именно растачивание гильз на ремонтный размер. При растачивании предусматривается...
-
Вязкостью называют свойство жидкости оказывать сопротивление взаимному перемещению ее слоев под действием внешней силы. Это сопротивление возникает...
-
Классификация систем автоматики - Строительные машины и оборудование
Автоматические системы, используемые в строительных машинах и оборудовании для контроля, регулирования и управления, можно классифицировать по ряду...
-
Автомобильный транспорт потребляет значительное количество топлива, стоимость которого составляет 10-15% всех затрат на автомобильные перевозки. Расход...
-
Расчетные режимы и нагрузки Нормы устанавливают два основных (I и III) и один дополнительный (II) расчетные режимы. По I расчетному режиму...
-
Тяговая диаграмма движения автомобиля При установившемся движении на ровной дороге уравнение тягового баланса , (14) Где PK - тяговое усилие на ведущих...
-
Различают три основных режима движения поезда: тяга, выбег и торможение. В режиме тяги (контроллер включен) на поезд действуют сила тяги локомотива и...
-
Анализ показателей качества САУ с нелинейным аппроксимирующим законом управления
Ключевые слова: АППРОКСИМАЦИЯ НЕЛИНЕЙНОСТЕЙ, ЗАКОН УПРАВЛЕНИЯ, ПОКАЗАТЕЛИ КАЧЕСТВА, ОБЪЕКТ УПРАВЛЕНИЯ, ПРОЦЕСС ФЕРМЕНТАЦИИ Анализ показателей качества...
-
Введение - Тяговые расчеты для тепловоза
Поезд перегон тепловоз При эксплуатации, а также при определении путей перспективного развития железных дорог, возникают многочисленные практические...
-
Сначала определяем передаточное число главной передачи из условия обеспечения заданной максимальной скорости автомобиля при движении на высшей передачи:...
-
Тяговой характеристикой автомобиля называется зависимость свободной силы тяги от скорости движения на различных передачах в заданных дорожных условиях....
-
В настоящее время на автомобилях наиболее широкое распространение получили двигатели внутреннего сгорания. На легковых автомобилях применяют бензиновые...
-
Цель курсовой работы - экономическое обоснование создания оптимальных условий плавания для работы судов (составов) на внутренних водных путях. Основная...
-
Метод тяговых расчетов - Нормирование маневровой работы подвижного состава
Время на выполнение основных составляющих рейсов и полурейсов в целом нормируется в зависимости от длины маневрового передвижения, величины маневрового...
-
Контрольные испытания двигателей - Обязанности локомотивной бригады при ведении поезда по участку
Каждая прошедшая ремонт электрическая машина должна пройти контрольные испытания. Порядок проведения таких испытаний должен соответствовать требованиям...
-
Охрана труда на предприятии - Устройство, назначение и диагностика двигателя
Требования к исходным материалам Общие положения Материалы, на которые нет сертификатов, допускается применять только после получения разрешения органов...
-
Выводы - Расчет летно-технических характеристик самолета при всех работающих двигателях
1. Произведенные в курсовой работе расчеты летно - технических характеристик самолета Ту-154 с двигателями ТРДД Д-30КУ-154 приближенно совпадают с...
-
Используя данные табл.6 покажем на графике (рис. 4) изменение скоростей в зависимости от высоты полета, штрихпунктирными линиями покажем влияние...
-
Полупроводниковые диоды - Исследование полупроводниковых диодов
Полупроводниковый прибор с одним р-n-переходом, имеющий два омических вывода, называют полупроводниковым диодом (рис.1.4). Одна из областей р-n-структуры...
-
Состав и обязанности локомотивной бригады, инструкторы и их обязанности Локомотивная бригада состоит, как правило, из двух человек - машиниста и его...
-
Двигатель - Методы проверки неисправностей транспортных средств
Содержание вредных веществ в отработанных газах и их дымность превышают величины, установленные ГОСТом Р 52033-2003 и ГОСТом Р 52160-2003. Требование...
-
Качество работы двигателя - его КПД, мощность, крутящий момент и экономичность зависят от многих факторов, в том числе и от фаз газораспределения, то...
-
Техническое обслуживание и ремонт подвижного состава, систем электроснабжения и путевого хозяйства На электротранспортных предприятиях Украины...
-
Задание 1 В таблице 1 приведены значения наработок до отказа в находившейся Под контролем партии одинаковых устройств. Таблица 1 Значения наработки...
-
Выбор индикаторного устройства - Система автоматического регулирования гидроакустикой батискафа
В качестве устройства высокоточного позиционирования выберем электронно-лучевую трубку, которая входит в состав осциллографа типа АСК-7042 бюджетный...
-
Расчет магнитопровода, 7 Экспериментальное исследование магнетрона - Многорезонаторный магнетрон
Совместно с представителями предприятия ООО "Магнитные системы" проведена оптимизация конструкции магнитопровода с помощью современной программы "BEMS"....
Обзор научно-технических и патентных источников, Обзор научные литературы по импульсному регулирование АД - Исследование импульсного регулирования асинхронного двигателя электроподвижного состава